刮水器设备、刮水器系统和用于运行刮水器设备的方法与流程
1.本发明涉及刮水器设备、刮水器系统和用于运行刮水器设备的方法。
背景技术:
2.已经提出了一种用于对传感器系统、尤其激光雷达系统进行刮水的刮水器设备,该刮水器设备具有至少一个刮水器单元并且具有至少一个压紧单元,该刮水器单元包括用于对传感器系统的表面进行刮水的至少一个刮水唇。
技术实现要素:
3.本发明涉及一种用于对传感器系统、尤其激光雷达系统进行刮水的刮水器设备,该刮水器设备具有至少一个刮水器单元并且具有至少一个压紧单元,该刮水器单元包括用于对传感器系统的表面进行刮水的至少一个刮水唇。
4.提出了,压紧单元包括至少一个弹簧元件以用于将刮水器单元压紧到表面处。
[0005]“刮水器设备”应该优选理解为窗板刮水器的至少一个部件、优选子结构组件。优选刮水器设备还能够包括尤其具有刮水片的整个窗板刮水器。优选刮水器设备设置用于应用在车辆处并且应用在传感器系统处。优选刮水器设备尤其作为窗板刮水器的部件设置用于清洁车辆处的传感器系统的表面、优选窗板。优选刮水器设备与车辆耦接。“设置”应该优选理解为特殊地构造、设定、设计和/或装备。“物体设置用于确定的功能”应该优选理解为,该物体在至少一种使用状态和/或运行状态中满足和/或实施这种特定的功能。“运行状态”应该优选理解为下述状态,在该状态中,刮水器设备对于刮水过程和/或刮水运行而言准备好运行并且/或者处于刮水运行中,在所述刮水运行中刮水器单元的、尤其窗板刮水器的刮水唇优选在传感器系统的窗板、尤其表面上得到引导并且在此有利地抵靠在表面处。传感器系统的表面能够构造为车辆的车辆窗板的部件。
[0006]
优选传感器系统构造为激光雷达系统。传感器系统、尤其激光雷达系统是至少一个激光雷达传感器的、尤其激光雷达传感器结构组件的尤其至少一个部件、优选至少一个子结构组件。传感器系统、尤其激光雷达系统尤其也能够包括整个激光雷达传感器、尤其整个激光雷达传感器结构组件。传感器系统、尤其激光雷达系统优选具有至少一个激光雷达单元,该激光雷达单元尤其包括至少一个激光雷达传感器元件。特别地,传感器系统、尤其激光雷达系统能够具有多个、如例如两个、三个、四个、五个等的激光雷达传感器元件。优选传感器系统、尤其激光雷达系统布置在车辆处,以用于环境检测、尤其用于自主行驶。传感器系统、尤其激光雷达系统能够布置在建筑工地上,以用于测量建筑物、用于扫描3d轮廓和/或布置在实验室中用于科研目的。特别地,传感器系统、尤其激光雷达系统更确切地说尤其借助于至少一个激光雷达传感器元件来设置用于检测和/或测量物体。优选传感器系统、尤其激光雷达系统设置用于应用在车辆处。优选传感器系统、尤其激光雷达系统构造为车辆的构件。替代地,传感器系统、尤其激光雷达系统能够构造为用于车辆的加装套件。优选传感器系统、尤其激光雷达系统设置用于检测车辆的周围环境中的物体。优选传感器系
统、尤其激光雷达系统为了检测物体而与车辆优选在车辆的顶盖区域、前部区域、至少一个侧部区域和/或尾部区域中进行耦接。车辆能够构造为道路运输工具(例如乘用车或载重汽车等)、构造为轨道车辆(如火车、机动车、有轨电车等)和/或构造为水运工具(如例如船舶、小船等)。车辆能够构造为清洁车辆、尤其清洁机器人,例如刮水机器人和/或吸尘机器人。优选传感器系统、尤其激光雷达系统与车辆、尤其与车辆的计算单元(如例如车载计算机)相连接。优选传感器系统、尤其激光雷达系统具有遮盖壁部,该遮盖壁部尤其能够实现传感器系统的激光束从传感器系统的壳体逸出,并且该遮盖壁部对于至少一个激光雷达传感器元件的探测波长来说尤其至少基本上是透明的。优选传感器系统的遮盖壁部将传感器系统的表面规定为遮盖壁部的外表面。优选传感器系统、尤其遮盖壁部至少部分地布置在车辆的外侧处。优选遮盖壁部至少部分地尤其向外遮盖传感器系统。例如遮盖壁部至少大部分由玻璃和/或聚碳酸酯构成。特别地,刮水器单元被设置用于机械地、更确切地说尤其借助于刮水唇对遮盖壁部进行清洁。优选刮水唇橡胶状地构造。
[0007]
优选刮水器单元设置用于借助于刮水液来对遮盖壁部进行额外地清洁。能够设想到的是,刮水器单元具有至少一个、优选多个流体喷嘴,所述流体喷嘴设置用于尤其在运行状态中将刮水液喷射到遮盖壁部上。至少一个流体喷嘴例如能够与已经存在于车辆中的流体供给单元连接。替代地,刮水器单元能够具有单独的流体供给单元,该流体供给单元例如包括至少一个流体供给线路、至少一个流体储罐和至少一个流体泵。优选刮水器单元为了刮水而被驱动单元在表面上引导。
[0008]
优选刮水器设备具有驱动单元,该驱动单元使刮水器单元为了清洁表面而线性地、尤其垂直于刮水唇的纵向延伸在表面上运动。优选驱动单元构造用于,使刮水器单元为了清洁表面而线性地、并且尤其双向地在表面上运动,其中,尤其压紧单元将刮水唇按压到表面上。优选驱动单元构造用于,使刮水器单元全面地沿着表面运动,尤其用于全面地机械地清洁表面。优选压紧单元、尤其至少一个弹簧元件构造用于将压紧力施加到刮水唇上,尤其用于使刮水唇沿着刮水唇的纵向轴线平面地抵靠在表面处。优选压紧单元、尤其至少一个弹簧元件构造用于将最小压紧力施加到刮水唇上,尤其用于以至少10 n/m、优选至少14 n/m、特别优选至少20 n/m的均匀的压力将刮水唇压紧到表面处。优选刮水器单元的刮水唇可替换地构造。特别地,刮水器单元的刮水唇能够在无工具的情况下可替换地构造。特别地,刮水器单元的刮水唇能够以即插即用的方式可替换地构造。优选至少一个弹簧元件在刮水唇的沿着刮水唇的纵向轴线的延伸的至少50%、优选至少75%的范围内延伸并且非常特别优选完全地在该延伸的范围内延伸。物体的“纵向轴线”应该尤其理解为平行于最小的几何长方体的最长的棱边伸展的轴线,该最小的几何长方体刚好还完全包围该物体并且优选伸展穿过该物体的几何方面的中间点。优选压紧单元与弹簧导轨不同地构造。优选压紧单元构造用于将压紧力施加到刮水唇上,其中,反作用力被导出到刮水臂上并且由刮水臂通过驱动单元并且尤其通过传感器系统导出到物体、如例如车辆或者传感器系统的壳体上。优选压紧单元与杆、尤其金属杆不同地构造,该杆尤其在未加载的状态中具有弯曲的形状,尤其如弹簧导轨那样。
[0009]
优选驱动单元构造用于,尤其在刮水器单元的运行状态之间使刮水器单元运动到停放位置中,在该停放位置中刮水唇尤其被压紧单元挤开直到止挡处以用于使至少一个弹簧元件减荷,并且/或者在该停放位置中刮水唇与表面间隔开地布置。例如表面、尤其遮盖
壁部能够在至少一个侧部处逐渐缩小地构造。特别地,至少一个遮盖壁部能够在至少一个侧部处具有至少一个斜坡元件。例如,驱动单元能够构造用于使刮水器单元为了刮水而从停放位置经由至少一个斜坡元件行驶到表面上。例如,驱动单元能够构造用于使刮水器单元为了刮水表面而经由至少一个斜坡元件从表面行驶到停放位置中。
[0010]
通过刮水器设备的按照本发明的设计方案能够实现对窗式元件的可靠的清洁。特别地,能够实现在有待清洁的传感器系统的可靠性的方面的有利的特性。能够尤其实现对于运行用于识别出物体的传感器系统的有利地高的安全标准。
[0011]
此外提出了,至少一个刮水器单元包括至少一个刮水臂,刮水唇大部分布置在该刮水臂中,并且在该刮水臂中刮水唇逆着和沿着、尤其平行于弹簧元件的压紧力能运动地得到支承。优选至少一个刮水臂的纵向轴线平行于至少一个表面来定向。优选至少一个表面至少基本上矩形地构造。优选至少一个刮水臂在至少一个表面的至少一个棱边长度的范围内延伸。优选至少一个刮水臂在该至少一个刮水臂的沿着该至少一个刮水臂的纵向轴线的延伸的至少一个端部处与驱动单元连接。优选至少一个刮水臂在该至少一个刮水臂的沿着该至少一个刮水臂的纵向轴线的延伸的两个端部处与驱动单元连接。优选至少一个刮水臂构造为在垂直于该至少一个刮水臂的纵向轴线的横截面中u形的条、尤其金属条。优选至少一个刮水臂尤其关于垂直于至少一个刮水臂的纵向轴线的横截面具有u形的轮廓。优选至少一个刮水臂至少基本上长方体形地构造。优选至少一个刮水臂限定了刮水器空腔,刮水唇大部分布置在该刮水器空腔中。优选压紧单元至少大部分布置在刮水器空腔中。优选刮水臂的尤其关于u形的轮廓的敞开的侧部面向所述表面来定向。优选压紧单元构造用于,将刮水唇通过至少一个刮水臂的敞开的侧部按压到窗板上。优选压紧单元布置在刮水唇与刮水臂的背离敞开的侧部的闭合的侧部之间。优选驱动单元固定地与车辆或者传感器系统相连接。优选至少一个刮水臂固定地与驱动单元相连接。优选压紧单元构造用于,将刮水唇对着至少一个刮水臂、尤其对着驱动单元、尤其对着车辆、尤其对着传感器系统按压到表面上。优选至少一个刮水唇能推移地在刮水器空腔中得到支承。优选至少一个刮水唇垂直于刮水唇的纵向轴线能推移地在刮水臂处得到支承。例如刮水器单元能够具有线性引导单元,该线性引导单元将刮水唇能运动地支承在刮水臂处。例如压紧单元能够构造为线性引导单元的部件。能够实现有利地稳健的刮水器单元,该刮水器单元尤其能够有利地强有力地在表面上引导刮水唇。
[0012]
此外提出了,至少一个弹簧元件构造为螺旋弹簧。替代地,至少一个弹簧元件能够构造为渐开线弹簧(evolutfeder)。至少一个弹簧元件能够由金属或者由塑料构造而成。能够实现有利地成本低廉的压紧单元。
[0013]
此外提出了,至少一个弹簧元件构造为气动弹簧。例如至少一个弹簧元件能够构造为塑料元件,该塑料元件气密地包围气动弹簧空腔。优选气动弹簧空腔填充有空气。优选尤其构造为气动弹簧的至少一个弹簧元件由人工的或者天然的弹性体构造而成。尤其在重量方面能够实现有利地轻的压紧单元。
[0014]
此外提出了,至少一个弹簧元件构造为泡沫弹簧。例如至少一个弹簧元件能够构造为塑料元件,该塑料元件包围多个气动弹簧空腔。优选气动弹簧空腔填充有空气。优选气动弹簧空腔与环境空气耦接。优选尤其构造为泡沫弹簧的至少一个弹簧元件由人工的或者天然的弹性体构造而成。能够实现有利地成本低廉的且轻的压紧单元。特别地,能够实现有
利地能快速装入的弹簧元件。
[0015]
此外提出了,至少一个弹簧元件构造为板式弹簧。优选,构造为板式弹簧的弹簧元件由金属构造而成。能够实现有利地稳健的和/或耐久的弹簧元件。
[0016]
此外提出了,压紧单元具有至少两个相同的弹簧元件。优选至少两个相同的弹簧元件布置在刮水唇的沿着该刮水唇的纵向轴线的延伸的彼此背离的端部区域处。压紧单元能够具有沿着刮水唇的沿该刮水唇的纵向轴线的延伸等距离地分布的三个、四个、五个等的弹簧元件,尤其用于将刮水唇均匀地压紧到表面上。能够实现有利地逐点的压紧效果。
[0017]
此外提出了,压紧单元具有至少两个不同的弹簧元件。优选至少两个不同的弹簧元件布置在刮水唇的沿该刮水唇的纵向轴线的延伸的彼此背离的端部区域处。尤其对于非平坦的表面来说能够实现有利地不均匀的压力分布。
[0018]
此外提出了,至少一个弹簧元件能电加热地构造。至少一个弹簧元件能够至少部分地构造为加热丝。至少一个弹簧元件能够与车辆的和/或传感器系统的电线路相连接。能够实现刮水器单元的有利的可加热性。
[0019]
此外提出了,至少一个弹簧元件与刮水唇一体式地构造。优选至少一个弹簧元件至少部分地构造为气动弹簧和/或至少部分地构造为泡沫弹簧并且与刮水唇一体式地构造而成。至少一个弹簧元件中的空腔能够用尤其构造为泡沫弹簧元件的另一弹簧元件来填充。用压紧单元能够实现刮水唇的有利地不复杂的更换。特别地,能够实现有利地成本低廉的压紧单元。
[0020]
此外提出了一种刮水器系统,其具有传感器系统并且具有按照本发明的刮水器设备。能够实现传感器系统的构件和刮水器设备的有利的兼容性。
[0021]
此外提出了一种用于运行按照本发明的刮水器设备的方法。特别地,刮水器设备的特征类似地也应该理解为对于用于运行刮水器设备的方法而言的方法特征。能够实现对表面的有利的清洁。
[0022]
按照本发明的刮水器设备、按照本发明的刮水器系统和/或按照本发明的方法在此应该不局限于上面所说明的使用方案和实施方式。特别地,按照本发明的刮水器设备、按照本发明的刮水器系统和/或按照本发明的方法为了满足在这方面所说明的功能方式而能够具有与各个元件、构件和单元以及方法步骤的在这方面所提及的数目不同的数目。此外,就本公开内容中所规定的值范围而言,处于所提及的限值之内的值也应该被视为得到公开并且能够任意使用。
附图说明
[0023]
另外的优点从以下的附图说明中得到。在附图中示出了本发明的六种实施例。附图、说明书和权利要求书包括大量的组合式特征。技术人员也将适宜地单独地考虑这些特征并且组合成有意义的其他组合。
[0024]
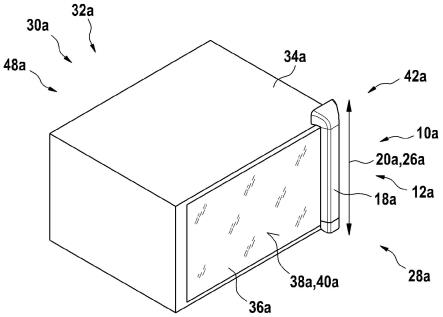
其中:图1以示意图示出了具有传感器系统并且具有按照本发明的刮水器设备的按照本发明的刮水器系统,图2以示意性的截面示图示出了具有传感器系统并且具有按照本发明的刮水器设备的按照本发明的刮水器系统,
图3以示意图示出了按照本发明的方法,图4以示意图示出了具有传感器系统并且具有替代的按照本发明的刮水器设备的替代的按照本发明的刮水器系统,图5以示意图示出了具有传感器系统并且具有另一替代的按照本发明的刮水器设备的另一替代的按照本发明的刮水器系统,图6以示意性的截面示图示出了具有传感器系统并且具有按照本发明的刮水器设备的第二种另外的替代的刮水器系统,图7以示意性的截面示图示出了具有传感器系统并且具有按照本发明的刮水器设备的第三种另外的替代的刮水器系统,并且图8以示意性的截面示图示出了具有传感器系统并且具有按照本发明的刮水器设备的第四种另外的替代的刮水器系统。
具体实施方式
[0025]
图1示出了刮水器系统48a。该刮水器系统48a包括传感器系统30a。该刮水器系统48a包括刮水器设备10a。
[0026]
传感器系统30a构造为激光雷达系统,尤其构造为激光雷达传感器。传感器系统30a设置用于检测和/或测量物体。传感器系统30a设置用于应用在车辆(未被示出)处。传感器系统30a具有激光雷达单元32a。激光雷达单元32a具有激光雷达传感器元件(未被示出)。激光雷达单元32a具有激光雷达壳体34a,激光雷达传感器元件布置在该激光雷达壳体中。传感器系统30a具有遮盖壁部36a,该遮盖壁部能够实现传感器系统30a的激光束从激光雷达壳体34a逸出,并且该遮盖壁部尤其对于激光雷达传感器元件的探测波长来说是透明的。遮盖壁部36a部分地向外遮盖传感器系统30a。遮盖壁部36a尤其构成激光雷达壳体34a的前方部件。遮盖壁部36a由玻璃和/或聚碳酸酯构成。遮盖壁部36a将传感器系统30a的表面38a规定为遮盖壁部36a的外表面40a。表面38a矩形地构造。传感器系统30a与尤其车辆的计算单元相连接以用于数据传递。
[0027]
刮水器设备10a构造用于对传感器系统30a进行刮水。刮水器设备10a包括刮水器单元12a。刮水器单元12a包括用于对传感器系统30a的表面38a进行刮水的刮水唇16a(参见图2)。刮水唇16a橡胶状地构成。特别地,刮水唇16a由天然的和/或人工的弹性体构成。特别地,刮水器单元12a设置用于机械地、更确切地说尤其借助于刮水唇16a来清洁遮盖壁部36a。
[0028]
刮水器单元12a具有刮水臂18a。刮水臂18a的纵向轴线20a平行于表面38a来定向。
[0029]
刮水唇16a大部分布置在刮水臂18a中。刮水唇16a在刮水臂18a中能运动地得到支承。刮水臂18a延伸超过表面38a的较短的棱边长度。
[0030]
刮水臂18a构造为在垂直于刮水臂18a的纵向轴线20a的横截面中u形的金属条。刮水臂18a尤其关于垂直于刮水臂18a的纵向轴线20a的横截面具有u形的轮廓。刮水臂18a的尤其关于u形的轮廓的敞开的侧部面向表面38a来定向。刮水臂18a构造不含扰流元件。特别地,刮水臂18a的背离表面38a的侧部具有平坦的外表面。特别地,刮水臂18a的背离表面38a的侧部的外表面平行于表面38a来定向。
[0031]
刮水臂18a长方体形地构造(参见图1和图2)。刮水臂18a限定了刮水器空腔22a,刮
水唇16a大部分布置在该刮水器空腔中。刮水唇16a能推移地在刮水器空腔22a中得到支承。刮水唇16a垂直于刮水唇16a的纵向轴线26a能推移地在刮水臂18a处得到支承。例如,刮水器单元12a具有线性引导单元28a,该线性引导单元将刮水唇16a能运动地支承在刮水臂18a处。优选刮水唇16a构造成沿着其纵向轴线26a能插接到线性引导单元28a中,以用于将刮水唇16a与线性引导单元28a连接起来。
[0032]
刮水器设备10a具有驱动单元(未被示出),该驱动单元使刮水器单元12a为了清洁表面38a而线性地在表面38a上运动。刮水臂18a固定地与驱动单元连接。刮水器单元12a为了刮水而被驱动单元(未被示出)在表面38a上引导。驱动单元构造用于使刮水器单元12a全面地沿着表面38a运动,尤其用于全面地机械地清洁表面38a。驱动单元固定地与传感器系统30a连接。传感器系统30a固定地与车辆连接。刮水臂18a在刮水臂18a的沿着该刮水臂18a的纵向轴线20a的延伸的端部处与驱动单元连接。驱动单元构造用于使刮水器单元12a为了清洁表面38a而线性地、并且尤其双向地在表面38a上运动,其中,压紧单元14a将刮水唇16a按压到表面38a上。
[0033]
驱动单元构造用于使刮水器单元12a尤其在刮水器单元12a的运行状态之间运动到停放位置中,在该停放位置中刮水唇16a尤其被压紧单元14a挤开直到止挡处,以用于使弹簧元件24a减荷,并且在该停放位置中刮水唇16a与表面38a间隔开地布置。遮盖壁部36a在一侧处具有斜坡元件42a。驱动单元构造用于使刮水器单元12a为了刮水而从停放位置经由斜坡元件42a运动到表面38a上。驱动单元构造用于使刮水器单元12a为了中止对表面38a进行刮水而经由斜坡元件42a从表面38a运动到停放位置中。
[0034]
刮水器设备10a包括压紧单元14a。压紧单元14a布置在刮水器空腔22a中。压紧单元14a布置在刮水唇16a与刮水臂18a的背离敞开的侧部的闭合的侧部之间。压紧单元14a构造用于将刮水唇16a通过刮水臂18a的敞开的侧部按压到遮盖壁部36a上、尤其表面38a上。压紧单元14a构造用于将刮水唇16a通过刮水臂18a借助于驱动单元对着车辆按压到表面38a上。压紧单元14a具有弹簧元件24a以用于将刮水器单元12a、尤其刮水唇16a压紧到表面38a处。刮水唇16a在刮水臂18a中逆着和沿着弹簧元件24a的压紧力能运动地得到支承。弹簧元件24a构造为板式弹簧。构造为板式弹簧的弹簧元件24a由金属构造而成。弹簧元件24a完全在刮水唇16a的沿着刮水唇16a的纵向轴线26a的延伸的范围内延伸。压紧单元14a、尤其弹簧元件24a构造用于将压紧力施加到刮水唇16a上,尤其用于将刮水唇16a沿着刮水唇16a的纵向轴线26a平面地抵靠在表面38a处。压紧单元14a、尤其弹簧元件24a构造用于将最小压紧力施加到刮水唇16a上,尤其用于以至少10 n/m、优选至少14 n/m的均匀的压力将刮水唇16a压紧到表面38a处。刮水器单元12a的刮水唇16a可替换地构造。特别地,刮水器单元12a的刮水唇16a在无工具的情况下可替换地构造。弹簧元件24a能电加热地构造。弹簧元件24a构造为加热丝。弹簧元件24a与车辆的电线路相连接。
[0035]
图3示出了用于运行刮水器设备10a的方法。在方法步骤、尤其运行步骤44a中,刮水器单元12a从停放位置运动到表面38a上并且在表面38a上来回运动至少一次。在方法步骤、尤其停放步骤46a中,刮水器单元12a从表面38a运动到停放位置中。
[0036]
在图4和图5中示出了本发明的另外的实施例。接下来的说明书和附图基本上限于实施例之间的区别,其中,关于相同标记的构件、尤其关于具有相同的附图标记的构件原则上也能够参阅尤其图1至图3的其他的附图的和/或对实施例的说明。为了区别这些实施例,
图1至图3中的实施例的附图标记后方标有字母a。在图4和图5的实施例中,字母a被字母b和c代替。
[0037]
在图4中示出了替代的刮水器系统48b。刮水器系统48b具有传感器系统30b。刮水器系统48b具有刮水器设备10b。刮水器设备10b包括刮水器单元12b。刮水器系统48b具有压紧单元14b。
[0038]
传感器系统30b构造为激光雷达传感器。传感器系统30b设置用于检测和/或测量物体。传感器系统30b设置用于应用在车辆(未被示出)处。传感器系统30b具有激光雷达单元32b。激光雷达单元32b具有激光雷达传感器元件(未被示出)。激光雷达单元32b具有激光雷达壳体34b,激光雷达传感器元件布置在该激光雷达壳体中。传感器系统30b具有遮盖壁部36b,该遮盖壁部能够实现传感器系统30b的激光束从激光雷达壳体34b逸出,并且该遮盖壁部对于激光雷达传感器元件的探测波长来说是透明的。遮盖壁部36b部分地向外遮盖传感器系统30b。遮盖壁部36b尤其构成激光雷达壳体34b的前方部件。遮盖壁部36b由玻璃和/或聚碳酸酯构造而成。遮盖壁部36b将传感器系统30b的表面38b规定为遮盖壁部36b的外表面40b。表面38b矩形地构造。传感器系统30b与尤其车辆的计算单元相连接以用于数据传递。
[0039]
刮水器设备10b具有驱动单元50b(示意性地示出),该驱动单元使刮水器单元12b为了清洁表面38b而线性地在表面38b上运动。
[0040]
图4中所示出的实施例与前述附图的实施例的区别尤其在于压紧单元14b的其他的设计方案。
[0041]
压紧单元14b具有至少两个相同的弹簧元件52b。压紧单元14b示例性地具有六个相同的弹簧元件52b。六个弹簧元件52b中的两个相同的弹簧元件52b布置在刮水唇16b的沿着刮水唇16b的纵向轴线26b的延伸的彼此背离的端部区域处。压紧单元14b具有等距离地沿着刮水唇16b的沿刮水唇16b的纵向轴线26b的延伸进行分布的六个弹簧元件52b,尤其用于将刮水唇16b均匀地压紧到表面38b上。弹簧元件52b等距离地分布地、尤其沿着刮水唇16b的沿刮水唇16b的纵向轴线26b的延伸进行布置。弹簧元件52b分别构造为螺旋弹簧。弹簧元件52b由金属构造而成。弹簧元件52b能电加热地构造。弹簧元件52b构造为加热丝。弹簧元件52b与车辆的电线路相连接。
[0042]
图5示出了另外的替代的刮水器系统48c。该刮水器系统48c具有传感器系统30c。刮水器系统48c具有刮水器设备10c。刮水器设备10c包括刮水器单元12c。刮水器系统48c具有压紧单元14c。
[0043]
传感器系统30c构造为激光雷达传感器。传感器系统30c设置用于检测和/或测量物体。传感器系统30c设置用于应用在车辆(未被示出)处。传感器系统30c具有激光雷达单元32c。激光雷达单元32c具有激光雷达传感器元件(未被示出)。激光雷达单元32c具有激光雷达壳体34c,激光雷达传感器元件布置在该激光雷达壳体中。传感器系统30c具有遮盖壁部36c,该遮盖壁部能够实现传感器系统30c的激光束从激光雷达壳体34c逸出,并且该遮盖壁部对于激光雷达传感器元件的探测波长来说是透明的。遮盖壁部36c部分地向外遮盖传感器系统30c。遮盖壁部36c尤其构成激光雷达壳体34c的前方部件。遮盖壁部36c由玻璃和/或聚碳酸酯构造而成。遮盖壁部36c将传感器系统30c的表面38c规定为遮盖壁部36c的外表面40c。表面38c矩形地构造。传感器系统30c与尤其车辆的计算单元相连接以用于数据传
递。
[0044]
刮水器设备10c具有驱动单元50c(示意性地示出),该驱动单元使刮水器单元12c为了清洁表面38c而线性地在表面38c上运动。
[0045]
在图5中所示出的实施例与前述附图的实施例的区别尤其在于压紧单元14c的其他的设计方案。
[0046]
压紧单元14c具有至少两个相同的弹簧元件56c。压紧单元14c示例性地具有三个相同的弹簧元件56c。这三个相同的弹簧元件56c分别构造为气动弹簧。弹簧元件56c由具有气泡的人工的弹性体构造而成。
[0047]
压紧单元14c具有至少两个不同的弹簧元件54c、56c。这两个不同的弹簧元件54c、56c布置在刮水唇16c的沿着刮水唇16c的纵向轴线26c的延伸的彼此背离的端部区域处。至少两个不同的弹簧元件54c、56c中的一个弹簧元件54c构造为泡沫弹簧。构造为泡沫弹簧的弹簧元件54c构造用于,将沿着纵向轴线26c变化的、尤其远离驱动单元50c指向地上升的压紧力施加到刮水唇16c上。构造为泡沫弹簧的弹簧元件54c构造用于,在面向构造为气动弹簧的弹簧元件56c的端部处将与构造为气动弹簧的弹簧元件56c相同大小的压紧力施加到刮水唇16c上。构造为泡沫弹簧的弹簧元件54c在刮水唇16c的沿着刮水唇16c的纵向轴线26c的延伸的至少50%的范围内延伸。
[0048]
各个附图的压紧单元14a、14b、14c的设计方案在此不应该理解为固定的方案,而是更确切地说应该理解成用于将刮水唇16a、16b、16c针对确定的要求按压到表面38a、38b、38c处的示例性方案。因此,压紧单元14a、14b、14c的各个特征对于本发明来说能够完全彼此以任意的(未被示出的)组合的方式彼此组合,以用于尤其针对不同地成形的表面38a、38b、38c实现特定的压紧优点。
[0049]
图6示出了第二种另外的替代的刮水器系统48d。图6中所示出的实施例与前述附图的实施例的区别尤其在于压紧单元14d的其他的设计方案。刮水器系统48d包括刮水器设备10d。刮水器设备10d包括刮水器单元12d。刮水器单元12d包括用于对传感器系统30d的表面38d进行刮水的刮水唇16d。压紧单元14d具有弹簧元件58d。
[0050]
弹簧元件58d与刮水唇16d一体式地构造。弹簧元件58d构造为气动弹簧并且与刮水唇16d一体式地构造。特别地,弹簧元件58d由与刮水唇16d相同的材料构造而成并且限定了填充有空气的空腔。
[0051]
图7示出了第三种另外的替代的刮水器系统48e。图7中所示出的实施例与前述附图的实施例的区别尤其在于压紧单元14e的其他的设计方案。刮水器系统48e包括刮水器设备10e。刮水器设备10e包括刮水器单元12e。刮水器单元12e包括用于对传感器系统30e的表面38e进行刮水的刮水唇16e。压紧单元14e具有弹簧元件60e。
[0052]
弹簧元件60e构造为泡沫弹簧并且与刮水唇16e一体式地构造。弹簧元件60e与刮水唇16e粘接。
[0053]
图8示出了第四种另外的替代的刮水器系统48f。图8中所示出的实施例与前述附图的实施例的区别尤其在于压紧单元14f的其他的设计方案。刮水器系统48f包括刮水器设备10f。刮水器设备10f包括刮水器单元12f。刮水器单元12f包括用于对传感器系统30f的表面38f进行刮水的刮水唇16f。压紧单元14f具有两个弹簧元件62f、64f。
[0054]
弹簧元件64f与刮水唇16f一体式地构造。弹簧元件64f构造为气动弹簧并且与刮
水唇16f一体式地构造。特别地,弹簧元件64f由与刮水唇16f相同的材料构造而成并且限定了空腔。弹簧元件62f构造为泡沫弹簧。弹簧元件62f与弹簧元件64f、尤其刮水唇16f粘接。弹簧元件62f布置、尤其粘接在由弹簧元件64f所限定的空腔中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1