控制车辆接近的方法、间距调节器、程序产品和存储单元与流程
1.本发明涉及一种用于控制车辆接近的方法。此外,本发明涉及一种间距调节器、一种计算机程序产品和一种存储单元。
背景技术:
2.在de 10 2018 201 306 a1中描述了一种间距调节器,该间距调节器读取车辆的加速踏板角度,用于确定车辆相对于在前行驶的参考车辆的间距目标值。使用所读取的值来确定间距目标值。将间距目标值传输到加速度调节器。在加速度调节器的计算装置中,使用目标间距值和加速踏板角度来计算加速度应有值。加速度应有值由加速度调节器的操控装置读取。在操控装置中,加速度应有值被转换成用于车辆的驱动装置的驱动控制信号和/或用于车辆的制动系统的制动信号。
技术实现要素:
3.根据本发明,提出了一种用于在使用自动化间距调设的情况下控制行驶的车辆接近至少一个在前行驶的参考车辆的方法。由此,接近过程中的自动化间距调设可以更好地相应于车辆驾驶员的期望。自动化间距调设可以更真实并且更舒适地进行。车辆的驾驶员的接受度能够提高,并且自动化间距调设的驾驶感觉能够更自然。车辆的驾驶员可以通过操作位态可感受到地并且直观地影响可用于间距调设的加速度变化曲线。
4.车辆可以是机动车、载客车、载重车、两轮车或类似的在行车道上行驶的车辆。这同样适用于参考车辆。参考车辆可以在与所述车辆的车道相同的车道中或在该车道的相邻车道中在所述车辆前方行驶。在应用该方法时,车辆、尤其是参考车辆也处于向前运动中。
[0005]“接近”优选理解为车辆与参考车辆之间的沿着行驶方向的间距减小。
[0006]
自动化间距调设可以包括自动化地调设间距和/或自动化地限制车辆与参考车辆之间的间距,以便维持至少一个最小间距。自动化间距调设可以配属于驾驶员导向的辅助功能、尤其是动态间距辅助(dda)。在自动化间距调设中,可以至少部分地、优选完全地承担车辆的制动踏板的用于施加制动减速度的功能。
[0007]
加速度变化曲线理解为车辆的加速度值的时间变化曲线。加速度变化曲线可以是车辆在接近期间的加速度的时间变化曲线。最大可能的加速度最高值可以在接近期间的加速度变化曲线中被达到。在重新接近下一参考车辆时,可以存在新的加速度变化曲线,根据随后产生的操作位态,又将新的最大可能的加速度最高值配属给该新的加速度变化曲线。
[0008]
加速度最高值在接近期间可根据操作位态变化。由此,例如已经开始的接近过程可以根据操作位态来匹配于驾驶员期望。
[0009]
操作位态可以包括操作元件的偏转位置以及操作元件的偏转速度。较大的操作位态可以要求车辆的比较小的操作位态更高的行驶速度。较大的操作位态可以相应于操作元件的较大的偏转和/或操作元件的较大的偏转速度。
[0010]
在本发明的一个优选的实施方案中有利的是,加速度是制动减速度,并且加速度
变化曲线是制动减速度变化曲线。制动减速度相应于负加速度。既可以通过正加速度,也可以通过负加速度来实施接近。
[0011]
在本发明的一个优选的实施方案中有利的是,加速度最高值是加速度的最大加速度和/或最大加速度梯度。最大加速度和/或最大加速度梯度为了实现制动减速度优选是负的。
[0012]
在本发明的一个优选的实施方案中设置,根据对危险状况的评估来改变最大可能的加速度最高值(am)。危险状况可能在接近期间出现。危险状况可以是由于车辆损害车辆的行驶安全性和/或车辆的周围环境的安全性的条件。在识别到危险状况时,最大可能的加速度最高值可以增大到最终避免危险状况的极端加速度最高值。对危险状况的评估可以在接近期间并且通过自动化间距调设来进行。
[0013]
在本发明的一种有利的实施方案中设置,操作元件是加速踏板并且操作位态是加速踏板位态。操作元件可以控制为了车辆的前进运动而施加在车轮上的驱动转矩。加速踏板位态可以由加速踏板角度来描述。操作位态可以是操作元件的偏转和/或操作元件的偏转在时间上的变化。
[0014]
在本发明的一种特定的实施方案中有利的是,加速度变化曲线在第一操作位态中在第一时刻具有比相应地在第二操作位态中在相应的时刻更小的加速度,并且在稍后的第二时刻具有比相应地在第二操作位态中在相应的时刻更大的加速度。由此可以根据操作位态适应性地调设在接近时的加速度变化曲线,并且仍然满足对车辆与参考车辆之间的最小间距的要求。
[0015]
操作位态越大,则加速度曲线的最大加速度最高值可以越大,而操作位态越小,则加速度曲线的最大加速度最高值可以越小。操作位态越小,则加速度曲线的最大加速度梯度可以越小,而操作位态越大,则加速度曲线的最大加速度梯度可以越大。在接近时较小的操作位态可以触发提早开始的制动过程,在该制动过程中使用较小的最大加速度最高值,该制动过程以最初较大的制动减速度开始,但该制动过程总体上也仅具有与较小的加速度最高值相应的、比操作位态较大时更小的最大制动减速度。
[0016]
本发明的一个优选的实施例是有利的,其中,第一操作位态大于第二操作位态,并且第一操作位态时的加速度最高值大于第二操作位态时的加速度最高值。例如,由驾驶员在接近时操作的加速踏板可以相应于第一操作位态触发在时间上延迟的制动过程,该制动过程在需要时在接近预给定的最小间距时也由于较高的加速度最高值而更强烈。在接近时松开的加速踏板可以触发提早开始的制动过程,在该制动过程中应用较小的加速度最高值,该制动过程以最初较大的制动减速度开始,但该制动过程也可以仅以相应于较小的加速度最高值的较小的最大可能的制动减速度结束。
[0017]
此外,根据本发明提出一种间距调节器,所述间距调节器设置为用于间接地或直接地实施具有至少一个之前说明的特征的方法。间距调节器能够在车辆的控制器中实现。控制器可以布置在车辆中。当间距调节器控制自动化间距调设时,该间距调节器例如可以直接实施所述方法。当在所述间距调节器下游连接有加速度调节器时,该间距调节器例如可以间接地实施所述方法,所述加速度调节器根据间距调节器的输出和必要时另外的参数控制自动化间距调设。
[0018]
在间距调节器或者连接在该间距调节器下游的后调节器的情况下,可以在转弯行
驶时在输入侧附加地考虑车辆的驾驶行为。此外,间距调节器或后调节器,例如加速度调节器,可以在输入侧考虑车辆的实际速度、车辆与参考车辆之间的速度差、车辆与参考车辆之间的实际间距和/或车辆与参考车辆之间的应有间距。
[0019]
自动化间距调设可以包含由车辆对环境检测。例如,可以通过间距传感器,例如雷达传感器、摄像机和/或激光雷达传感器来测量车辆与参考车辆之间的间距。
[0020]
此外,根据本发明提出一种计算机程序产品,其具有机器可读的并且可在至少一个计算机上实施的指令,在实施所述指令时运行之前描述的方法。
[0021]
此外,根据本发明,提出了一种存储单元,其实施为是机器可读的并且可由至少一个计算机访问,并且在其上存储有所描述的计算机程序。
[0022]
本发明的其它优点和有利的构型从附图说明和附图中得出。
附图说明
[0023]
下面参照附图详细描述本发明。附图详细地示出:
[0024]
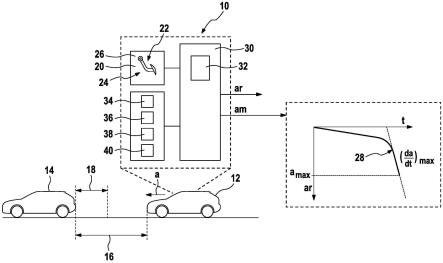
图1:本发明的一个特定实施例的用于控制车辆接近的方法。
[0025]
图2:车辆在接近在前行驶的参考车辆时的行驶状况。
[0026]
图3:车辆在接近在前行驶的参考车辆时的另一行驶状况。
[0027]
图4:具有本发明的一个特定实施方式的间距控制器的车辆。
具体实施方式
[0028]
图1示出了本发明的一种特定的实施方式的用于控制车辆的接近的方法。用于控制行驶的车辆12接近至少一个在前行驶的参考车辆14的方法10在使用车辆12与参考车辆14之间的间距16的自动化间距调设的情况下进行。在此,自动化间距调设以能够应用于车辆12的加速度a来实施,通过该加速度来影响、例如缩小车辆12与参考车辆14之间的间距16。加速度a可以是负的并且作为制动减速度起作用。如果行驶的车辆12以比参考车辆14更高的速度接近在前行驶的参考车辆14,则可以通过自动化间距调设来实现通过制动减速度来制动车辆12,用于维持作为车辆12与参考车辆14之间的安全间距的最小的最小间距18。
[0029]
在方法10中,根据车辆12的可通过车辆12的驾驶员操纵的操作元件22的操作位态20来调设应有加速度ar,在此尤其是制动减速度,该应有加速度预给定了在车辆12中为自动化间距调设要应用的加速度a。操作元件22可以是车辆12的加速踏板24并且操作位态20是加速踏板位态26,所述加速踏板位态可以通过加速踏板角度来描述。大的加速踏板角度尤其相应于加速踏板24的大的偏转并且因此相应于大的操作位态20。
[0030]
为自动化间距调设预给定的应有加速度ar(在此是相应于负加速度的预给定的制动减速度)在自动化间距调设期间跟随在时间上的加速度变化曲线28,该加速度变化曲线优选是制动减速度变化曲线,并且该加速度变化曲线描述了为车辆12与参考车辆14之间的自动化间距调设而预给定的制动减速度的时间变化曲线。
[0031]
除了操作元件22的操作位态20之外,为了计算应有加速度ar还可以在具有至少一个间距调节器32的计算单元30中在输入侧考虑车辆12的实际速度34、车辆12与参考车辆14之间的速度差36、车辆12与参考车辆14之间的实际间距38和/或车辆12与参考车辆14之间的应有间距40。应有加速度ar由计算单元30输出。
[0032]
在方法10中,为了在接近时自动调设间距使用操作位态20,以便改变在加速度变化曲线28中起限制作用的最大可能的加速度最高值am。在加速度变化曲线28上的加速度最高值am因此取决于操作位态20。加速度最高值am可以是应有加速度ar的最大加速度a
max
和/或最大加速度梯度并且从计算单元30输出。由此,在接近时应用的加速度变化曲线28中的可能的最大加速度a
max
和/或最大加速度梯度可以被限制。
[0033]
根据下面描述的图2和图3阐明图1中的方法10的优点和特性。在图2中示出车辆12的行驶状况,其中,在前行驶的参考车辆14比车辆12更缓慢地行驶并且从车辆12所在的车道42向相邻车道44驶离。因为车辆12的驾驶员识别到参考车辆14的驶离过程并且在此希望尽可能保持或者甚至加速其速度,所以驾驶员保持操纵加速踏板24。
[0034]
车辆12与仍阻挡的、然而正在驶离车道42的参考车辆14之间的自动化间距调设能够实现最初在接近时所调设的小的制动减速度,因为驾驶员希望尽可能少地降低其速度,这根据作为操作位态的加速踏板位态26来检测并且在根据图1的方法中在输入侧使用。同时,通过加速踏板位态26来调设加速度最高值,例如最大加速度和/或最大加速度梯度,其能够实现最初小的制动减速度并且在进一步或危急地接近参考车辆14时实现制动减速度的大的最大加速度和/或大的最大加速度梯度。例如,当参考车辆14与所说明的驶离运动相反地又返回到车道42中时,或者当比所说明的更慢地执行驶离过程时,能够要求制动减速度的最大加速度和/或最大加速度梯度。然而,通过所调设的加速度最高值将能够实现接近过程的安全执行,优选地以便保持最小间距。由此,用于维持最小间距的制动过程可以在稍后开始,但是如果需要的话可以更强地实施并且因此总体上在时间上缩短。
[0035]
与之相比较地,图3描绘了这样的行驶状况,其中在相邻车道44上在前行驶的参考车辆14可以被识别到并且以比车辆与参考车辆之间的应有间距更大的间距并入车辆12所在的车道42中。如果参考车辆14的这种运动(由于该运动参考车辆14在车道42上在车辆12前方行驶并且阻挡车道42)被车辆12的驾驶员提早识别出,则通常的行为是松开加速踏板24。由此,通过加速度最高值、尤其是最大加速度梯度与加速踏板24的操作位态的相关性,在车辆12开始接近参考车辆14时能够比在图2的行驶状况下调设出更早的和更大的制动减速度。因为在该相应于比在图2中的行驶状况中更小的操作位态的加速踏板位态的情况下,加速度最高值、尤其是最大加速度梯度被调设得更小,并且能够在所出现的制动减速度变化曲线中实现更小的制动减速度和/或制动减速度的更小的加速度梯度,以便提高驾驶舒适性并且能够实现车辆的更自然的驾驶感觉。
[0036]
在松开操作元件时,能够以更大的制动减速度执行可能的突然地并且接近最小间距地发生的制动过程。通过松开加速踏板,确认驾驶员对于制动减速度的驾驶意图并且这也可以通过提高的最大制动减速度来执行,以便防止撞上接近地并入的车辆。
[0037]
为了不低于车辆12与参考车辆14之间的最小间距,以大于图2中的行驶状况的制动减速度开始接近。制动减速度的所期望的加速度梯度低于图2中的行驶状况。在逐渐接近并达到最小间距时,比在图2的行驶状况下更强烈地关于加速度最高值限制自动化间距调设。这种以延长的且减弱的制动过程对接近的控制也相应于自然的驾驶行为,其中,如果在车道42上出现以较低速度运动的障碍物,则车辆12的速度提早减小。然而,在车辆的危险状况下,较小的操作位态、例如操作元件的松开可相应于制动减速的驾驶员期望来触发较大
的制动减速度。
[0038]
图4示出了具有本发明的一种特定的实施方式的间距调节器的车辆。车辆12具有控制器46,所述控制器配属有间距调节器32,用于在车辆12接近在前行驶的参考车辆时通过应用自动化间距调设来计算应有加速度、尤其是制动减速度和加速度最高值。间距调节器32可以在输入侧考虑车辆12的实际速度、车辆12与参考车辆之间的速度差、车辆12与参考车辆之间的实际间距和/或车辆12与参考车辆之间的应有间距。实际间距可以通过间距传感器47、例如雷达传感器、摄像机和/或激光雷达传感器来测量。
[0039]
由间距调节器32输出的应有加速度能够输出给控制单元48,所述控制单元控制制动装置50,所述制动装置在车轮52上提供用于制动减速的制动作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1