一种混合动力汽车的制动方法及相关装置与流程
本技术涉及混合动力汽车,尤其涉及一种混合动力汽车的制动方法及相关装置。
背景技术:
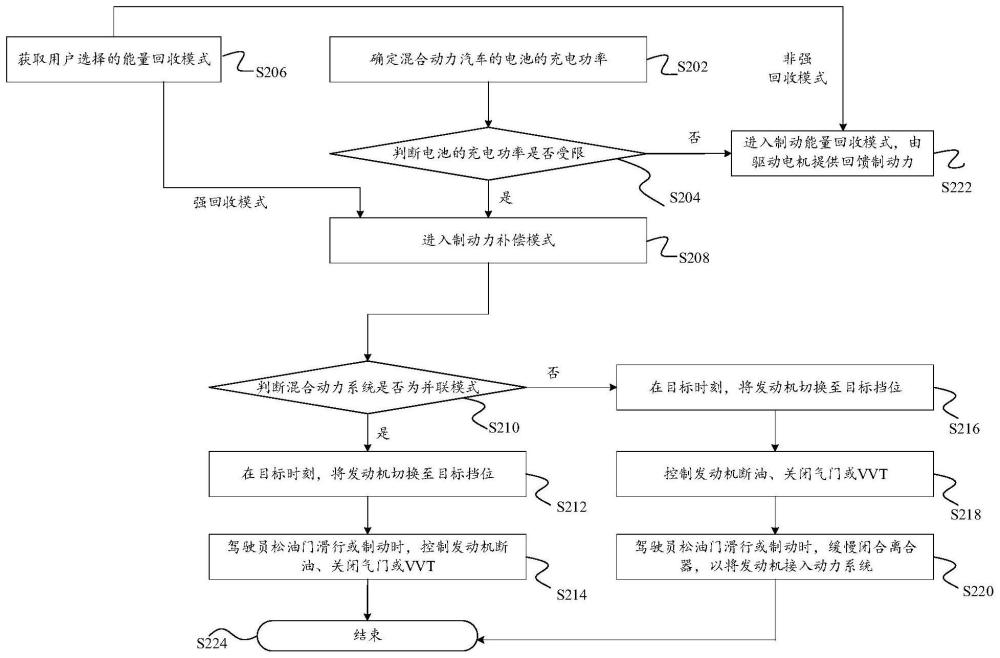
1、混合动力汽车在滑行和制动时能够利用电机回收制动能量,提高整车经济性。大多数混合动力汽车都根据制动能量回收强度,制定了多种制动能量回收模式供用户选择。
2、但在电池充电功率受限条件下,比如电池电量过高或者电芯温度过低时,电池充电能力会受到限制。此时,制动能量回收模式无法调整,相同制动踏板时制动力感受与电池正常条件下有较大差异,容易引起用户抱怨。
3、基于此,业界亟需提供一种制动方法,以减小相同制动踏板时制动力感受与电池正常条件下制动力感受的差异,提升用户体验。
技术实现思路
1、本技术的目的在于提供一种混合动力汽车的制动方法,在混合动力汽车的电池的充电功率受限的情况下,通过控制所述发动机在最大阻力状态,以补充制动力损失,达到制动能量回收(regen)的效果,减小相同制动踏板时制动力感受与电池正常条件下制动力感受的差异,提升用户体验。
2、本技术可以通过以下技术解决方案来实现:
3、第一方面,本技术提供了一种混合动力汽车的控制方法。该方法包括:
4、获取用户选择的能量回收模式;
5、当所述混合动力汽车的电池的充电功率受限,且所述用户选择的能量回收模式为强回收模式时,确定所述混合动力汽车的发动机的目标挡位;
6、在所述发动机处于目标挡位后,控制所述发动机处于最大阻力状态。
7、在一些可能的实现方式中,所述控制所述发动机处于最大阻力状态,包括:
8、控制所述发动机断油,关闭所述发动机的气门,和/或者关闭所述发动机的可变气门正时vvt。
9、在一些可能的实现方式中,所述混合动力系统为并联模式;
10、所述控制所述发动机处于最大阻力状态,包括:
11、当驾驶员松油门或制动时,控制所述发动机断油,关闭所述发动机的气门,和/或者关闭所述发动机的可变气门正时vvt。
12、在一些可能的实现方式中,所述混合动力系统为非并联模式;
13、所述控制所述发动机处于最大阻力状态,包括:
14、控制所述发动机断油,关闭所述发动机的气门,和/或者关闭所述发动机的可变气门正时vvt;
15、当驾驶员松油门或制动时,闭合离合器,以将所述发动机接入传动系。
16、在一些可能的实现方式中,所述在所述发动机处于目标挡位后,控制所述发动机处于最大阻力状态,包括:
17、在目标时刻将所述发动机切换至目标挡位;
18、控制所述发动机处于最大阻力状态。
19、在一些可能的实现方式中,所述目标时刻根据油门踏板开度、制动踏板开度、轮端需求扭矩和车速中的一种或多种确定。
20、在一些可能的实现方式中,所述确定所述混合动力汽车的发动机的目标挡位,包括:
21、根据所述发动机在最大阻力状态下的限力扭矩,确定各挡位能够提供的轮端阻力扭矩;
22、确定轮端需求的回收扭矩;
23、根据所述轮端需求的回收扭矩以及补偿比例,确定所述发动机需求的补充扭矩;
24、根据所述发动机在各挡位能够提供的轮端阻力扭矩和所述发动机需求的补充扭矩,确定所述发动机的目标挡位。
25、在一些可能的实现方式中,所述根据所述发动机在各挡位能够提供的轮端阻力扭矩和所述发动机需求的补充扭矩,确定所述发动机的目标挡位,包括:
26、根据所述发动机在各挡位能够提供的轮端阻力扭矩和所述发动机需求的补充扭矩,确定挡位范围;
27、根据所述发动机的最高转速以及所述当前车速,确定所述发动机满足要求的最低挡位;
28、根据所述挡位范围和所述最低挡位,确定目标挡位。
29、第二方面,本技术提供了一种混合动力汽车的制动装置。所述装置包括:
30、获取模块,用于获取用户选择的能量回收模式;
31、确定模块,用于当混合动力汽车的电池的充电功率受限,且所述用户选择的能量回收模式为强回收模式时,确定所述发动机的目标挡位;
32、控制模块,用于在所述发动机处于目标挡位后,控制所述发动机处于最大阻力状态。
33、在一些可能的实现方式中,所述控制模块具体用于:
34、控制所述发动机断油,关闭所述发动机的气门,和/或者关闭所述发动机的可变气门正时vvt。
35、在一些可能的实现方式中,所述混合动力系统为并联模式;
36、所述控制模块具体用于:
37、当驾驶员松油门或制动时,控制所述发动机断油,关闭所述发动机的气门,和/或者关闭所述发动机的可变气门正时vvt。
38、在一些可能的实现方式中,所述混合动力系统为非并联模式;
39、所述控制模块具体用于:
40、控制所述发动机断油,关闭所述发动机的气门,和/或者关闭所述发动机的可变气门正时vvt;
41、当驾驶员松油门或制动时,闭合离合器,以将所述发动机接入传动系。
42、在一些可能的实现方式中,所述控制模块具体用于:
43、在目标时刻将所述发动机切换至目标挡位;
44、控制所述发动机处于最大阻力状态。
45、在一些可能的实现方式中,所述目标时刻根据油门踏板开度、制动踏板开度、轮端需求扭矩和车速中的一种或多种确定。
46、在一些可能的实现方式中,所述确定模块具体用于:
47、根据所述发动机在最大阻力状态下的限力扭矩,确定各挡位能够提供的轮端阻力扭矩;
48、确定轮端需求的回收扭矩;
49、根据所述轮端需求的回收扭矩以及补偿比例,确定所述发动机需求的补充扭矩;
50、根据所述发动机在各挡位能够提供的轮端阻力扭矩和所述发动机需求的补充扭矩,确定所述发动机的目标挡位。
51、在一些可能的实现方式中,所述确定模块具体用于:
52、根据所述发动机在各挡位能够提供的轮端阻力扭矩和所述发动机需求的补充扭矩,确定挡位范围;
53、根据所述发动机的最高转速以及所述当前车速,确定所述发动机满足要求的最低挡位;
54、根据所述挡位范围和所述最低挡位,确定目标挡位。
55、第三方面,本技术提供了一种混合动力汽车。所述混合动力汽车。所述混合动力汽车包括发动机管理系统和发动机,所述发动机管理系统用于执行如本技术第一方面所述的方法,以控制所述发动机,实现所述混合动力汽车的制动。
56、本技术在上述各方面提供的实现方式的基础上,还可以进行进一步组合以提供更多实现方式。
57、与现有技术相比,本技术提供的混合动力汽车的制动方法具有如下有益效果:
58、针对混合动力汽车具有双动力源的特点,可利用发动机在断油状态下的拖曳扭矩补偿regen损失。在电池充电功率受限,整车滑行或制动时,通过将发动机控制在最大阻力状态,并为其匹配合适的挡位,在将发动机接入动力系统后,可补偿部分regen的制动力损失,达到类似于regen的效果。
- 还没有人留言评论。精彩留言会获得点赞!