一种4D打印水陆两栖螺旋桨的制作方法
一种4d打印水陆两栖螺旋桨
技术领域
1.本发明属于螺旋桨桨叶结构设计技术领域,具体涉及一种4d打印水陆两栖螺旋桨。
背景技术:
2.两栖登陆作战是在第二次世界大战期间迅速发展起来的一种海陆空联合作战模式,其主要是利用海军、空军等将己方的军事力量从海上投入敌方占领的海岸或是从己岸将军力移至他处。传统的水陆两栖机器人通常同时集成了水上与陆地两套运动机构,在不同环境下切换运动装置获得水陆通行能力,这就导致了此类机器人具有复杂的机械结构,增大了控制的难度,进而限制了水陆两栖机器人的发展。另外,现有的水陆两栖机器人有多种推进形式,不同的推进形式决定其推进结构的设计。常见的水陆两栖机器人根据其推进形式的不同可分为:足式两栖机器人、轮式两栖机器人、仿生式两栖机器人等已有的轮式两栖机器人推进装置大多由桨叶、车轮以及法兰盘组成,在陆地前进时,桨叶收缩在车轮轮廓内,而当机器人进入水中时,控制桨叶展开,当车轮转动时桨叶起到划水作用。然而,由于水陆两栖运动功能的转换是通过控制机械结构完成,导致其机械结构和控制系统的复杂程度高。因此,如何使水陆两栖机器人在具备两栖运动能力的同时保有较低的结构复杂度是亟待解决的问题。
3.部分水陆两栖机器人的推进/行走机构设计成浆腿,浆腿由若干个螺旋桨叶片及其底部的圆弧形底板组成,浆腿在水下工作时,通过螺旋桨叶片的旋转推动机器人移动,浆腿在陆地上工作时,通过螺旋桨叶片的旋转带动底板交替落足实现机器人在陆地上行走,该机器人在陆地上越障性能优秀,能够轻松在海边礁石区和海底行进。虽然浆腿降低了机构的复杂度,解决了机器人在水下和陆地的推进/行走问题,但是这种结构上集成行走功能的螺旋桨会破坏传统螺旋桨叶片的形状,降低螺旋桨的效率,并产生较大的推进噪声。
技术实现要素:
4.有鉴于此,本发明提供了一种4d打印水陆两栖螺旋桨,能够实现螺旋桨从水下驱动到陆地行走的状态转换,水下驱动时可有效降低螺旋桨的推进噪声。
5.一种4d打印水陆两栖螺旋桨,螺旋桨包括浆毂和可变形叶片;多个可变形桨叶沿圆周方向均匀布置且固定安装在桨毂上,所述可变形叶片通过4d打印成型,可变形叶片内部具有加热部件,加热部件温度升高后使得叶片材料发生形变,在水下工作时,可变形叶片的外形与普通叶片一致,在陆地工作时,可变形叶片的分为两瓣反向弯曲展开后形成桨腿结构,桨腿结构在桨毂的带动下完成陆地行走功能。
6.进一步地,所述可变形叶片包括上叶片、下叶片、硅橡胶和电热材料;所述上叶片和下叶片的形状完全一致,上叶片和下叶片的厚度为完整叶片厚度的二分之一,上叶片和下叶片的内部均设有电热材料,上叶片和下叶片通过硅橡胶硫化后形成可变形叶片,硅橡胶位于上叶片和下叶片之间同时将叶稍外表面进行包覆。
7.进一步地,打印可变形叶片时使用双喷头4d打印装备,打印时将上叶片和电热材料、下叶片和电热材料一起打印。
8.进一步地,所述上叶片和下叶片采用镍、钛双向形状记忆合金加工制成。
9.进一步地,在上叶片和下叶片上选取相应的位置进行双向形状记忆合金变形回复训练,使柔性叶片在该位置实现变形。
10.有益效果:
11.1、本发明的螺旋桨包括浆毂和可变形叶片,多个可变形桨叶沿圆周方向均匀布置且固定安装在桨毂上,可变形叶片内部具有加热部件,加热部件温度升高后使得叶片材料发生形变,在水下工作时,可变形叶片的外形与普通叶片一致,在陆地工作时,可变形叶片的分为两瓣反向弯曲展开后形成桨腿结构,桨腿结构在桨毂的带动下完成陆地行走功能。由于可变形叶片通过4d打印成型,可实现叶片一体化成形提高成形精度,此外,可变形叶片通过受热变形的方式形成桨腿结构,可变形叶片温度下降后随即恢复到初始工作状态,这种变形方式不仅降低了机构的复杂度,而且不会破坏传统螺旋桨叶片的形状,相对于桨腿结构的螺旋桨来说,本发明的螺旋桨不会降低工作效率,也不会产生较大的推进噪声。
12.2、本发明的可变形叶片包括上叶片、下叶片、硅橡胶和电热材料;上叶片和下叶片的形状完全一致,上叶片和下叶片的厚度为完整叶片厚度的二分之一,上叶片和下叶片的内部均设有电热材料,上叶片和下叶片通过硅橡胶硫化后形成可变形叶片,硅橡胶将叶稍外表面进行包覆,硅橡胶能够跟随上叶片和下叶片的变形产生弹性形变,不仅能够提供对上叶片和下叶片之间的密封,还能够为叶片变形后提供结构支撑,当叶片要再次回到水中工作时,硅橡胶为上叶片和下叶片提供反向的拉力,有利于可变形叶片回到初始状态的外形。
13.3、本发明打印可变形叶片时使用双喷头4d打印装备,打印时将上叶片和电热材料、下叶片和电热材料一起打印,由于4d打印成形精度高,因此4d打印螺旋桨叶片既可以实现叶片一体化成形提高成形精度,又能保证叶片的空间曲面形态,由于叶片为整体成型,能够大大提高叶片的承载力。
附图说明
14.图1为本发明4d打印水陆两栖螺旋桨在水下工作时的状态示意图;
15.图2为本发明4d打印水陆两栖螺旋桨在陆地工作时的状态示意图;
16.图3为本发明4d打印水陆两栖螺旋桨的侧视图。
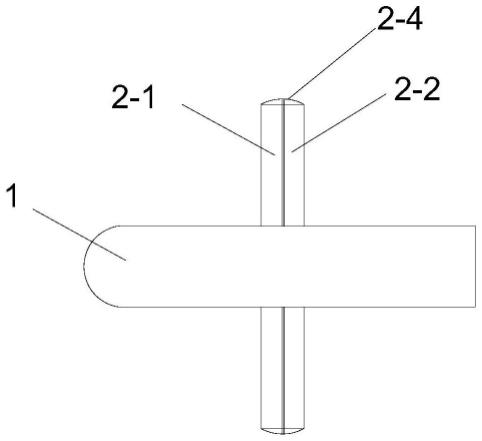
17.其中,1-桨毂、2-可变形叶片、2-1-上半叶、2-2-下半叶、2-3-电热材料、2-4-硅橡胶。
具体实施方式
18.下面结合附图并举实施例,对本发明进行详细描述。
19.本发明提供了一种4d打印水陆两栖螺旋桨,螺旋桨包括浆毂1和可变形叶片2,六片可变形桨,2沿圆周方向均匀布置且固定安装在桨毂1上。
20.如附图2和3所示,可变形叶片2包括上叶片2-1、下叶片2-2、硅橡胶2-4和电热材料2-3;上叶片2-1和下叶片2-2的形状完全一致,上叶片2-1和下叶片2-2的厚度为完整叶片厚
度的二分之一,上叶片和下叶片的内部均设有电热材料2-3,本实施例中的电热材料2-3采用镍、钛双向形状记忆合金,加工时采用双喷头4d打印装备将上叶片2-1和电热材料2-3同步打印,同样将下叶片2-2和电热材料2-3一起打印一体成型,最后上叶片2-1和下叶片2-2通过硅橡胶2-4硫化后形成可变形叶片,硅橡胶2-4位于上叶片2-1和下叶片2-2之间同时将叶稍外表面进行包覆。
21.当机器人在水下工作时,可变形叶片2的上半叶2-1、下半叶2-1通过硅橡胶2-4连接在一起,构成一个完整的螺旋桨叶片,叶片的旋转推动机器人前进,其形态如附图1所示;当机器人在陆地上工作时,通过对电热材料2-3施加电激励源,使可变形叶片2的上叶片2-1和下叶片2-2发生受热变形,上叶片2-1和下叶片2-2的叶稍位置分离,高弹性硅橡胶2-4被拉开,形成上宽下窄的结构,当上叶片2-1和下叶片2-2的变形到位后,此时可变形叶片2的主体结构变成桨腿,叶稍外表面的硅橡胶2-4构成桨腿的足部,其形态如附图2所示,可以使机器人在陆地上行驶;如果机器人需要重新在水下工作,取消电激励后上叶片2-1和下叶片2-2在温度下降至常温后可恢复到初始状态。
22.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1