用于智能农业机器人的自动除泥行走系统的制作方法
1.本发明涉及农业机器人领域,具体是涉及用于智能农业机器人的自动除泥行走系统。
背景技术:
2.农业机器人是一种机器,是机器人在农业生产中的运用,是一种可由不同程序软件控制,以适应各种作业,能感觉并适应作物种类或环境变化,有检测(如视觉等)和演算等人工智能的新一代无人自动操作机械。
3.农业机器人由于需长期在田地间作业,如遇泥泞地段,会使其轮胎上逐渐附着泥土,当泥土逐渐填满轮胎防滑沟槽后,会造成轮胎抓地力下降从而造成打滑的现象,目前的农业机器人针对该问题,一般采取两种解决方式,其一是选择一处固定地点建造专门的清洗设备,以定期对农业机器人进行完整全面的清洗,但是其成本过高且复杂,不利与推广;其二是在农业机器人的车身上加装清洁刷以及高压喷头,通过冲刷的方式对轮胎进行清洗,但由于农业机器人进行长时间的作业,续航尤为重要,以此方式进行清洗,要在机器人车身上加装水泵水箱等设备,会使机器人的续航时间严重缩水,即便机器人配有太阳能电池板,当清水用完之后仍然需要返回工作站补水,实际使用中存在诸多不便。
技术实现要素:
4.基于此,有必要针对现有技术问题,提供一种用于智能农业机器人的自动除泥行走系统。
5.为解决现有技术问题,本发明采用的技术方案为:
6.用于智能农业机器人的自动除泥行走系统,包括:
7.蜂巢轮胎,其内缘成型有一个橡胶定位凸缘;
8.两个内支撑环,对称设置于橡胶定位凸缘的两侧;
9.两个轮辋盖,对称设置于蜂巢轮胎的两侧,橡胶定位凸缘与两个轮辋盖以及两个内支撑环之间通过若干个加长螺栓共同连接成一体;
10.中空半轴,横向贯穿两个轮辋盖的中心处,中空半轴上设置有用于相向抱紧两个轮辋盖的锁定机构;
11.支撑柱套,活动套接于中空半轴位于两个轮辋盖之间的外壁上,并且支撑柱套的两端分别抵紧两个轮辋盖的内侧中心处;
12.震动棒,数量为偶数个,所有震动棒沿圆周方向均匀分布于支撑柱套的外侧,每个震动棒均沿径向向外插设于蜂巢轮胎中,并且震动棒的外端弹性抵紧蜂巢轮胎的外胎内壁,所有震动棒朝向蜂巢轮胎圆心的一端共同连接至支撑柱套;
13.电刷体,一体成型于中空半轴的侧壁上,电刷体连接中空半轴的内外壁;
14.两个电极,均固定设置于中空半轴的内侧,两个电极均弹性贴紧电刷体的内壁;
15.取电器,数量与震动棒的数量一致,且均设置于圆柱连接套上,每个取电器的触头
端均贴紧与电刷体的外壁,并且每个取电器均与对应的震动棒电连接。
16.进一步的,所述橡胶定位凸缘上设置有若干个沿其周向等间距分布的第一螺栓通孔,每个内支撑环上均设置有与第一螺栓通孔一一对应的第二螺栓通孔,其中一个轮辋盖的圆边处均设置有若干个与第二螺栓通孔一一对应的焊接螺母,所有加长螺栓穿过第一螺栓通孔和第二螺栓通孔后旋入焊接螺母,从而将两个轮辋盖、两个内支撑环以及蜂巢轮胎固连成一体。
17.进一步的,每个所述轮辋盖的内侧均成型有加强筋,两个轮辋盖的内侧中心处均成型有定位环,中空半轴的一端依次穿过两个定位环,每个定位环与支撑柱套之间均设有一个套接在中空半轴上的垫环,垫环与中空半轴之间通过花键相连,垫环的两端均成型有第一环状防滑筋,支撑柱套的两端与定位环的一端均成型有与对应第一环状防滑筋互相嵌合的第二环状防滑筋。
18.进一步的,所述锁定机构包括成型于中空半轴外壁上的环形压板和旋接于中空半轴外端的锁帽,每个轮辋盖的中心处均成型有向内凹陷的碗型沉槽,当锁帽旋紧于中空半轴的端部,环形压板和锁帽分别从两个轮辋盖的外侧相向压紧对应碗型沉槽的槽底。
19.进一步的,所述支撑柱套的侧壁上成型有两组内螺纹连接柱,每组内螺纹连接柱的数量均为振动棒数量的一半,两组内螺纹连接柱呈交错状态分布成型于支撑柱套的侧壁上,每个内螺纹连接柱的轴线均与内螺纹连接柱的轴线垂直相交,每个内螺纹连接柱均连通支撑柱套的内外侧,每个内螺纹柱套上均旋接有一个连接管,每个连接管均用于容纳对应的震动棒,震动棒的头端伸出连接管后插接与蜂巢轮胎的胎壁内,连接管远离支撑柱套的一端内侧设置有耐磨套,连接管内还设有用于将震动棒向外弹性顶出的第一弹簧,所述取电器设置于连接套内靠近支撑柱套的一端,第一弹簧靠近取电器的一端设置有一垫片,垫片与取电器之间设置有第二弹簧,第二弹簧用于使取电器的触头端弹性抵紧电刷体的外壁。
20.进一步的,所述中空半轴的内侧同轴设置有一空心固定轴,空心固定轴的一端与农业机器人的底盘固定连接,另一端嵌装有一个与空心半轴的内端贴合的耐磨盖,耐磨盖的外缘处与中空半轴的内壁贴合,空心固定轴的外壁与中空半轴的内壁之间留有间隙,两个电极均位于空心固定轴的内侧,空心固定轴的侧壁对称开设有两个用于供电极漏出并接触电刷体内壁的第一通孔。
21.进一步的,每个所述电极均包括管柱外壳和触头体,触头体位于管柱外壳内,触头体的头部向外伸出管柱外壳并与电刷体的内壁贴合,触头体通过导线从农用机器人上取电,两个触头体之间设有第三弹簧,第三弹簧的两端分别伸入两个管柱外壳内并抵紧触头体的尾部。
22.进一步的,所述空心固定轴的内侧插设有一个绝缘管套,所述绝缘管套的侧壁上开设有沿其母线方向延伸的弹性间隙,绝缘管套的侧壁上还对称成型有两个用于将导线分别向外引出的引线槽,引线槽的始端开设有一用于供管柱外壳向外伸出的第二通孔,所述管柱外壳靠近引线槽的一侧壁上开设有用于避让导线的避让口,管柱外壳位于绝缘管套内的一端成型有一圈用于抵触引线槽弧顶处的限位凸缘,管柱外壳远离引线槽的一侧壁上成型有一个用于抵触绝缘管套内壁的限位凸起。
23.进一步的,所述电刷体由第一环状导体和两个对称分布于第一环状导体两侧的第
避让口;41-限位凸缘;42-限位凸起;43-第一环状导体;44-第二环状导体;45-导条;46-弯缘;47
‑ꢀ
引线槽。
具体实施方式
47.为能进一步了解本发明的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本发明作进一步详细描述。
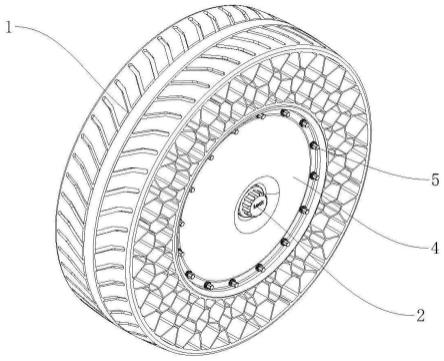
48.参照图1至图16所示,用于智能农业机器人的自动除泥行走系统,包括:
49.蜂巢轮胎1,其内缘成型有一个橡胶定位凸缘2;
50.两个内支撑环3,对称设置于橡胶定位凸缘2的两侧,内支撑环3用于从内测对蜂巢轮胎 1进行支撑,从而使橡胶材料支撑的蜂巢轮胎1具有刚性支撑结构;
51.两个轮辋盖4,对称设置于蜂巢轮胎1的两侧,橡胶定位凸缘2与两个轮辋盖4以及两个内支撑环3之间通过若干个加长螺栓5共同连接成一体,加长螺栓5将蜂巢轮胎1、两个内支撑环3以及两个轮辋盖4固连成一体后,使得蜂巢轮胎1具有了完整的支撑架结构,从而使蜂巢轮胎1在载荷滚动的过程,保持其形状,阻止其内胎壁在过载时发生变形;
52.中空半轴6,横向贯穿两个轮辋盖4的中心处,中空半轴6上设置有用于相向抱紧两个轮辋盖4的锁定机构;中空半轴6连接两个轮辋盖4和农业机器人的动力系统,通过中空半轴6 传递动力系统的旋转扭矩,从而带动与轮辋盖4固连的蜂巢轮胎1滚动行走,锁定机构用于将两个轮辋盖4和中空半轴6牢固的连接在一起。
53.支撑柱套7,活动套接于中空半轴6位于两个轮辋盖4之间的外壁上,并且支撑柱套7 的两端分别抵紧两个轮辋盖4的内侧中心处;支撑柱套7位于两个轮辋盖4之间,随着锁定机构将两个轮辋盖4相向抵紧,支撑柱套7的两端会反向支撑两个轮辋盖4的中心处,从而防止轮辋盖4在相向抵紧的过程中发生变形。
54.震动棒8,数量为偶数个,所有震动棒8沿圆周方向均匀分布于支撑柱套7的外侧,每个震动棒8均沿径向向外插设于蜂巢轮胎1中,并且震动棒8的外端弹性抵紧蜂巢轮胎1的外胎内壁,所有震动棒8朝向蜂巢轮胎1圆心的一端共同连接至支撑柱套7;所有震动棒8均匀的分布插设于蜂巢轮胎1的胎壁夹层中,通过所有震动棒8进行高频震动,从而将干固在轮胎沟槽内的泥土震落,进而实现免刷洗、免冲洗的去除污泥。
55.电刷体9,一体成型于中空半轴6的侧壁上,电刷体9连接中空半轴6的内外壁;
56.两个电极10,均固定设置于中空半轴6的内侧,两个电极10均弹性贴紧电刷体9的内壁;
57.取电器11,数量与震动棒8的数量一致,且均设置于圆柱连接套上,每个取电器11的触头端均贴紧与电刷体9的外壁,并且每个取电器11均与对应的震动棒8电连接。
58.每个震动棒8在随着蜂巢轮胎1旋转的过程中,均通过取电器11接触电刷体9,而电刷体9在随着中空半轴6旋转的过程中,始终与内侧的电极10保持接触取电,进而实现为震动棒8供电。
59.所述橡胶定位凸缘2上设置有若干个沿其周向等间距分布的第一螺栓通孔12,每个内支撑环3上均设置有与第一螺栓通孔12一一对应的第二螺栓通孔13,其中一个轮辋盖4的圆边处均设置有若干个与第二螺栓通孔13一一对应的焊接螺母14,所有加长螺栓5穿过第一螺栓通孔12和第二螺栓通孔13后旋入焊接螺母14,从而将两个轮辋盖4、两个内支撑环
3以及蜂巢轮胎1固连成一体。在安装的过程中,依次将所有加长螺栓5一一穿过轮辋盖4、内支撑环3以及橡胶定位凸缘2,最终与对侧轮辋盖4上的焊接螺母14旋紧从而实现固定连接,进而使蜂巢轮胎1能够随着轮辋盖4的旋转而跟着旋转。
60.每个所述轮辋盖4的内侧均成型有加强筋15,用于加强轮辋盖4的整体结构刚性,避免其容易发生变形,两个轮辋盖4的内侧中心处均成型有定位环16,中空半轴6的一端依次穿过两个定位环16,每个定位环16与支撑柱套7之间均设有一个套接在中空半轴6上的垫环 17,垫环17与中空半轴6之间通过花键18相连,垫环17的两端均成型有第一环状防滑筋19,支撑柱套7的两端与定位环16的一端均成型有与对应第一环状防滑筋19互相嵌合的第二环状防滑筋20,在对中空半轴6进行安装的过程中,将中空半轴6的一端穿过两个轮辋盖4的定位环16、两个垫环17以及支撑柱套7后,通过锁紧机构相向夹紧两个轮辋盖4,此过程中,垫环17、定位环16以及中空柱套上的第一环状防滑筋19和第二环状防滑筋20逐渐互相嵌合直至啮合锁紧形成一个刚性整体,从而能够增大中空半轴6与两个轮辋盖4的接触面,进而能够更稳定的传递旋转力矩带着蜂巢轮胎1旋转。
61.所述锁定机构包括成型于中空半轴6外壁上的环形压板21和旋接于中空半轴6外端的锁帽22,每个轮辋盖4的中心处均成型有向内凹陷的碗型沉槽23,当锁帽22旋紧于中空半轴6 的端部,环形压板21和锁帽22分别从两个轮辋盖4的外侧相向压紧对应碗型沉槽23的槽底。中空半轴6穿过两个轮辋盖4后,旋紧锁帽22,在锁帽22旋紧的过程中,逐渐将两个轮辋盖 4、两个垫环17以及支撑柱套7压紧在另一侧的环形压板21上,两个轮辋盖4上的碗型沉槽 23用于容纳圆形压板或者锁帽22,更加美观。
62.所述支撑柱套7的侧壁上成型有两组内螺纹连接柱24,每组内螺纹连接柱24的数量均为震动棒8数量的一半,两组内螺纹连接柱24呈交错状态分布成型于支撑柱套7的侧壁上,每个内螺纹连接柱24的轴线均与内螺纹连接柱24的轴线垂直相交,每个内螺纹连接柱24均连通支撑柱套7的内外侧,每个内螺纹柱套上均旋接有一个连接管25,每个连接管25均用于容纳对应的震动棒8,震动棒8的头端伸出连接管25后插接与蜂巢轮胎1的胎壁内,连接管25 远离支撑柱套7的一端内侧设置有耐磨套26,连接管25内还设有用于将震动棒8向外弹性顶出的第一弹簧27,所述取电器11设置于连接套内靠近支撑柱套7的一端,第一弹簧27靠近取电器11的一端设置有一垫片28,垫片28与取电器11之间设置有第二弹簧29,第二弹簧 29用于使取电器11的触头端弹性抵紧电刷体9的外壁。随着蜂巢轮胎1滚动的过程中,其最低点会与地面接触,从而该处胎壁的变形会造成该处震动棒8沿径向回缩,此过程中,震动棒8的端部在连接管25内挤压第一弹簧27,当蜂巢轮胎1的此处离开地面后,在第一弹簧 27的作用下会带动震动棒8再次伸出复位,以此方式使所有的震动棒8始终能够抵紧蜂巢轮胎1的外胎壁,进而能够有效的传递振幅来使泥土掉落。震动棒8在工作时,在第二弹簧29 的作用下使取电器11始终与电刷体9的外壁保持接触,从而保证了震动棒8能够正常的取电工作。耐磨套26用于减缓震动棒8的外壁与连接管25之间的摩擦损耗。
63.所述中空半轴6的内侧同轴设置有一空心固定轴30,空心固定轴30的一端与农业机器人的底盘固定连接,另一端嵌装有一个与空心半轴的内端贴合的耐磨盖31,耐磨盖31的外缘处与中空半轴6的内壁贴合,空心固定轴30的外壁与中空半轴6的内壁之间留有间隙,两个电极10均位于空心固定轴30的内侧,空心固定轴30的侧壁对称开设有两个用于供电极10漏出并接触电刷体9内壁的第一通孔32。固定空心轴呈固定状态保持在中空半轴6的
内部,通过端部的耐磨盖31防止中空半轴6的旋转而带来的磨损。
64.每个所述电极10均包括管柱外壳33和触头体34,触头体34位于管柱外壳33内,触头体34的头部向外伸出管柱外壳33并与电刷体9的内壁贴合,触头体34通过导线35从农用机器人上取电,两个触头体34之间设有第三弹簧36,第三弹簧36的两端分别伸入两个管柱外壳33内并抵紧触头体34的尾部。通过第三弹簧36反向抵触两个触头体34,从而使两个触头体34分别从两个第一通孔32中向外伸出,并保持贴紧于电刷体9的内壁。
65.所述空心固定轴30的内侧插设有一个绝缘管套37,所述绝缘管套37的侧壁上开设有沿其母线方向延伸的弹性间隙38,绝缘管套37的侧壁上还对称成型有两个用于将导线35分别向外引出的引线槽47,引线槽47的始端开设有一用于供管柱外壳33向外伸出的第二通孔39,所述管柱外壳33靠近引线槽47的一侧壁上开设有用于避让导线35的避让口40,管柱外壳 33位于绝缘管套37内的一端成型有一圈用于抵触引线槽47弧顶处的限位凸缘41,管柱外壳 33远离引线槽47的一侧壁上成型有一个用于抵触绝缘管套37内壁的限位凸起42。绝缘管套 37用于将两个电极10的位置保持在第一通孔32的位置,引线槽47的始端的第二通孔39与第一通孔32的位置相对应,管柱外壳33活动设置于第二通孔39内,并且管柱外壳33在第三弹簧36的作用下仅能够沿径向在第二通孔39内移动,并且在限位凸缘41和限位凸起42 的共同抵触作用下,防止管柱外壳33在弹力作用下从第二通孔39中崩出。
66.在对两个电极10进行安装时,先将两个电极10分别嵌入绝缘管套37上的两个第二通孔 39的位置处,并将电极10的导线35顺着引线槽47向外理出,接着将绝缘管整体塞入空心固定轴30内,此过程中弹性间隙38会收缩从而使绝缘管套37的管径变小,进而便于绝缘管套 37的塞入,直至绝缘管套37的端部抵触耐磨盖31即可,此时在第三弹簧36的作用下,电极 10从第一通孔32出伸出并接触电刷体9。
67.所述电刷体9由第一环状导体43和两个对称分布于第一环状导体43两侧的第二环状导体44组成,第一环状导体43的直径小于第二环状导体44的直径,第一环状导体43的内壁与空心半轴的内壁齐平,第二环状导体44的外壁与空心半轴的外壁齐平,第一环状导体43 和两个第二环状导体44之间通过若干个导条45固定连接。第一环状导体43和两个第二环状导体44间隔成型于空心半轴的侧壁上,其中第一环状导体43成型于空心半轴的内壁上,第二环状导体44成型于空心半轴的外壁上,刀条成型于空心半轴的内壁中,以此方式既保证了空心半轴的完整性,又可使电刷体9能够电导通空心半轴的内外侧。
68.所述轮辋盖4的外缘处成型有用于贴紧蜂巢轮胎1内缘处的弯缘46。弯缘46抱紧蜂巢轮胎1的边缘处用于防止外接异物进入。
69.以上实施例仅表达了本发明的一种或几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1