车道偏离防止装置的制作方法
1.本发明涉及汽车等车辆的车道偏离防止装置。
背景技术:
2.车道偏离防止装置由车辆位置检测装置检测车辆相对于车道的位置,并在基于检测出的车辆位置判定为车辆有从车道偏离之虞(危险、可能)时,执行转向轮的自动转向和警报的发出中的至少一方的车道偏离预防控制。
3.在即使判定为车辆有从车道偏离之虞,但驾驶员有意(有意向)进行如车道变更(变道)这样的车道偏离的情况下,也需要限制车道偏离预防控制。关于驾驶员是否有意偏离车道,根据驾驶员的转向操作、由驾驶员对转向信号杆的操作、车辆相对于车道的倾斜角即斜行(斜向行驶)角度等来判定。
4.例如日本特开2019-177762号中记载了在检测到基准值以上的转向速度、基准值以上的转向扭矩(torque)和/或基准值以上的转向扭矩变化量时限制车道偏离预防控制。根据这种车道偏离防止装置,能够在驾驶员打算进行车道变更等车道偏离的状况下,降低基于车道偏离预防控制的转向轮的自动转向干扰驾驶员的驾驶操作的可能性。
技术实现要素:
5.即使在如上述日本特开2019-177762号所记载的车道偏离防止装置这样的以往的车道偏离防止装置中,根据车辆的行驶状况,也存在不限制地执行车道偏离预防控制的情况。例如,如稍后详细说明的那样,在打算使车辆向相对于主路以小的倾斜角分岔的旁路(岔道)移动的情况下,有时即使对于主路的车道边界判定为有意偏离车道,而对于旁路的车道边界也会判定为无意偏离车道。因此,即使驾驶员打算使车辆向旁路移动,由于基于车道偏离预防控制的转向轮的自动转向会干扰驾驶员的驾驶操作,因此驾驶员也无法如愿顺利地使车辆向旁路移动,有时会有违和感。
6.本发明的主要目的在于,提供一种改善为即使在如打算使车辆向相对于主路以小的倾斜角分岔的旁路移动这种情况下也能够限制车道偏离预防控制的车道偏离防止装置。
7.根据本发明,提供一种车道偏离防止装置(100),其包括车辆位置检测装置(摄像头(camera)传感器12)和控制单元(lda ecu10),车辆位置检测装置检测车辆(50)相对于车道(54)的位置,控制单元构成为,在基于由车辆位置检测装置检测出的车辆的位置判定为车辆有跨越第一车道边界(56l)之虞并且会跨越第一车道边界的车辆的驾驶员无意偏离车道时(s20、s30),执行转向轮(24)的自动转向和警报的发出中的至少一方的车道偏离预防控制(s50),在判定为车辆有跨越第一车道边界之虞并且会跨越第一车道边界的车辆的驾驶员有意偏离车道时,中止车道偏离预防控制的执行(s10、s40),直到判定为预先设定的控制恢复条件成立(s60)为止。
8.控制单元(lda ecu10)构成为,在中止了车道偏离预防控制的执行并且控制恢复条件不成立的状况下,判定为在车辆接近的一侧有第二车道边界(64)但是从车辆到第二车
道边界的距离为基准距离(lsc)以上时,继续中止车道偏离预防控制的执行。
9.根据上述构成,在中止了车道偏离预防控制的执行并且控制恢复条件不成立的状况下,判定为在车辆接近的一侧有第二车道边界但是从车辆到第二车道边界的距离为基准距离以上时,继续中止车道偏离预防控制的执行。由此,即使在驾驶员打算使车辆向相对于主路以小的倾斜角分岔的旁路移动的情况下,也不执行车道偏离预防控制。因此,没有转向轮的自动转向干扰驾驶员的驾驶操作,警报装置不工作(开动),所以驾驶员能够如愿顺利地使车辆向旁路移动。
10.〔发明的技术方案〕
11.在本发明的一个技术方案中,控制单元(lda ecu10)以车速(v)越高则基准距离(lsc)越大的方式,根据车速,可变地设定基准距离。
12.车速越高,则车辆接近第二车道边界的速度越快,车辆跨越第二车道边界的可能性越高,因此,基准距离优选为车速越高则越大。根据上述技术方案,以车速越高则基准距离越大的方式,根据车速,可变地设定基准距离。由此,与基准距离恒定而与车速无关的情况相比,车辆跨越第二车道边界的可能性较高,能够适当地进行是否需要针对第二车道边界执行车道偏离预防控制的判定。
13.在本发明的另一个技术方案中,控制单元(lda ecu10)在继续中止着车道偏离预防控制的执行的状况下,判定为若车辆(50)跨越第二车道边界(64)则车辆有变为危险状况之虞时,对第二车道边界执行车道偏离预防控制。
14.根据上述技术方案,在继续中止着车道偏离预防控制的执行的状况下,判定为若车辆跨越第二车道边界则车辆有变为危险状况之虞时,对第二车道边界执行车道偏离预防控制。由此,能够通过车道偏离预防控制,降低车辆跨越第二车道边界而车辆变为危险状况的可能性。
15.再者,在本发明的另一个技术方案中,控制单元(lda ecu10)在继续中止着车道偏离预防控制的执行的状况下,判定为车辆(50)向接近第二车道边界(64)的方向的转向扭矩(ts)为基准扭矩(tac)以下时,对第二车道边界执行车道偏离预防控制。
16.在车辆向接近第二车道边界的方向的转向扭矩超过基准扭矩时,可认为驾驶员希望使车辆接近第二车道边界。相对于此,在车辆向接近第二车道边界的方向的转向扭矩为基准扭矩以下时,可认为由于驾驶员的疏忽等导致车辆接近第二车道边界且车辆有跨越第二车道边界之虞。
17.根据上述技术方案,在继续中止着车道偏离预防控制的执行的状况下,判定为车辆向接近第二车道边界的方向的转向扭矩为基准扭矩以下时,对第二车道边界执行车道偏离预防控制。由此,能够通过车道偏离预防控制,降低车辆跨越第二车道边界的可能性。
18.再者,在本发明的另一个技术方案中,控制单元(lda ecu10)在判定为车辆(50)接近第二车道边界(64)的速度(va)为基准速度(vac)以上并且车辆向接近第二车道边界的方向的转向扭矩(ts)为基准扭矩(tac)以下时,对第二车道边界执行车道偏离预防控制。
19.根据上述技术方案,在判定为车辆接近第二车道边界的速度为基准速度以上并且车辆向接近第二车道边界的方向的转向扭矩为基准扭矩以下时,对第二车道边界执行车道偏离预防控制。由此,能够在由于驾驶员的疏忽等导致车辆快速接近第二车道边界且车辆跨越第二车道边界的可能性高的状况下,通过车道偏离预防控制,降低车辆跨越第二车道
边界的可能性。
20.再者,在本发明的另一个技术方案中,控制单元(lda ecu10)以车速(v)越高则基准速度(vac)越小的方式,根据车速,可变地设定基准速度。
21.车速越高,则车辆接近第二车道边界的速度越快,车辆跨越第二车道边界的可能性越高,因此,基准速度优选为车速越高则越小。根据上述技术方案,以车速越高则基准速度越小的方式,根据车速,可变地设定基准速度。由此,与基准速度恒定而与车速无关的情况相比,车辆跨越第二车道边界的可能性较高,能够适当地进行是否需要针对第二车道边界执行车道偏离预防控制的判定。
22.再者,在本发明的另一个技术方案中,控制单元(lda ecu10)以车速(v)越高则基准扭矩(tac)越小的方式,根据车速,可变地设定基准扭矩。
23.车速越高,转向轮根据驾驶员的转向操作而转向时的转向阻力越小,因此,基准扭矩优选为车速越高则越小。根据上述技术方案,以车速越高则基准扭矩越小的方式,根据车速,可变地设定基准扭矩。由此,与基准扭矩恒定而与车速无关的情况相比,能够适当地判定驾驶员是否通过转向操作而打算使车辆向接近第二车道边界的方向移动。
24.再者,在本发明的另一个技术方案中,控制单元(lda ecu10)在判定为从车辆(50)到第二车道边界(64)的距离小于基准距离(lsc)时,对第二车道边界执行车道偏离预防控制,并以若车辆跨越第二车道边界则车辆会变为危险状况之虞越高则基准距离越大的方式,根据车辆会变为危险状况之虞可变地设定基准距离。
25.根据上述技术方案,以若车辆跨越第二车道边界则车辆会变为危险状况之虞越高则基准距离越大的方式,根据车辆会变为危险状况之虞,可变地设定基准距离。由此,若车辆跨越第二车道边界则车辆会变为危险状况之虞越高,越容易判定为从车辆到第二车道边界的距离小于基准距离,能够有效地对第二车道边界执行车道偏离预防控制。
26.在上述说明中,为了有助于本发明的理解,对于与后述的实施方式对应的发明构成,以写在括号内的方式添加了其在实施方式中使用的名称和/或标号。然而,发明的各构成要素并非限定于与以写在括号内的方式添加的名称和/或标号对应的实施方式的构成要素。本发明的其他目的、其他特征以及附随的优点应该可根据以下的参照附图所记述的对于本发明的实施方式的说明而容易地理解。
附图说明
27.以下,参照附图对本发明的示例性实施方式的特征、优点以及技术和产业意义进行说明,在附图中相同的标号表示相同的要素,并且其中:
28.图1是表示本发明的车道偏离防止装置的实施方式的概略构成图。
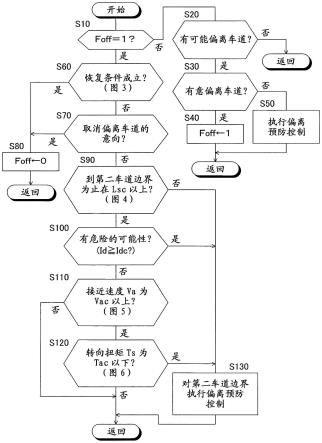
29.图2是表示实施方式中的车道偏离防止控制例程的流程图。
30.图3是用于基于车速v运算关于经过时间的基准值tc的映射图(map)。
31.图4是用于基于车速v及危险之虞运算基准距离lsc的映射图。
32.图5是用于基于车速v运算基准速度vac的映射图。
33.图6是用于基于车速v运算基准扭矩tac的映射图。
34.图7是表示车辆相对于车道的长度方向倾斜地行驶的状况的图。
35.图8是表示在车道偏离防止装置为以往的车道偏离防止装置的情况下驾驶员希望
进行从车道向旁路的车道偏离以使得车辆从车道跨越第一车道边界向旁路移动的状况的图。
36.图9是表示在车道偏离防止装置为实施方式的车道偏离防止装置的情况下驾驶员希望进行从车道向旁路的车道偏离以使得车辆从车道跨越第一车道边界向旁路移动的状况的图。
具体实施方式
37.以下,参照附图,对本发明的实施方式涉及的车道偏离防止装置详细进行说明。
38.<构成>
39.如图1所示,实施方式涉及的车道偏离防止装置100应用于车辆50,具备车道偏离防止ecu10、电动助力转向ecu20以及转向ecu40。在本说明书中,根据需要将车道偏离防止称为lda(lane departure alert with control的缩写),根据需要将电动助力转向称为eps(electric power steering的缩写)。
40.这些ecu是具备微型计算机作为主要部分的电子控制装置(electronic control unit),经由can(controller area network)52以能够相互收发信息的方式连接。各微型计算机包括cpu、rom、ram、非易失性存储器及接口等。cpu通过执行存储于rom的指令(程序、例程)而实现各种功能。这些ecu也可以若干个或者全部整合为一个ecu。
41.如稍后详细说明的那样,lda ecu10的rom存储有与图2所示的流程图对应的车道偏离防止控制的程序,cpu按照该程序执行车道偏离防止控制。lda ecu10上连接有摄像头传感器12、雷达传感器14、车速传感器16、警报装置18以及图中没有示出的lda开关(switch)。
42.摄像头传感器12具备相机部和车道识别部,车道识别部对由相机部拍摄所获得的图像数据进行解析而识别道路的白线。摄像头传感器12(相机部)拍摄车辆50前方的风景。摄像头传感器12(车道识别部)每经过预定的运算周期,反复将与识别出的白线有关的信息供给到lda ecu10。
43.如图7所示,摄像头传感器12能够识别车道54的边界(称为车道边界)即白线56l和56r,并且基于白线与车辆50的位置的关系,检测车辆相对于车道54的相对位置关系。在此,车辆50的位置是指车辆的重心50a的位置,但也可以是车辆在俯视图中的中心位置。后述的车辆的横向位置表示车辆的重心位置在车道宽度方向上的位置,车辆的横向速度表示车辆的重心位置在车道宽度方向上的速度。基于由摄像头传感器12检测的白线与车辆的相对位置关系来求取它们。
44.雷达传感器14具备雷达收发部以及信号处理部(未图示),雷达收发部发射毫米波段的电波(以下,称为“毫米波”),并接收由存在于发射范围内的立体物(例如,其他车辆、自行车、护栏、路侧的构造物等)反射的毫米波(即,反射波)。信号处理部每当经过预定时间,基于发送的毫米波与接收的反射波的相位差、反射波的衰减水平以及发送毫米波后到接收反射波为止的时间等,取得表示车辆50与立体物的距离、车辆50与立体物的相对速度、立体物相对于车辆50的相对位置(方向)等的信息并供给到lda ecu10。
45.车速传感器16检测车辆50的车速v,按预定的控制周期反复将表示车速v的信号供给到lda ecu10。lda开关由驾驶员操作,将表示是否接通(on)的信号供给到lda ecu10。lda
开关接通意味着将执行车道偏离防止控制。
46.在由lda ecu10判定为车辆50有从车道54偏离之虞时,警报装置18工作,进行作为车道偏离预防控制之一的警报的发出、即表示车辆50有从车道偏离之虞这一意思的警报的发出。警报装置18可以是如警报灯这样的发出视觉警报的警报装置、如警报蜂鸣器这样的发出听觉警报的警报装置、和发出如座椅的振动这样的体感警报的警报装置中的任一方,也可以是它们的任意组合。
47.eps ecu20通过控制eps装置22,能够根据需要使转向轮24转向。由此,eps ecu20及eps装置22构成根据需要使转向轮24自动转向的转向装置26。在由lda ecu10判定为车辆50有从车道偏离之虞时,作为另一个车道偏离预防控制,eps ecu20进行用于预防车辆从车道偏离的转向轮24的自动转向。
48.如图1所示,在一体地连结有由驾驶员操作的方向盘28的转向轴30上设置有检测转向扭矩ts的扭矩传感器32。向eps ecu20输入表示由扭矩传感器32检测出的转向扭矩ts的信号。eps ecu20基于转向扭矩ts及由车速传感器16检测出的车速v,以在本技术领域内公知的要领控制eps装置22,由此控制转向辅助扭矩,减轻驾驶员的转向负担。从eps ecu20经由can52向lda ecu10输入表示转向扭矩ts的信号。
49.转向ecu40上连接有由驾驶员操作的转向信号杆42及转向信号灯44l、44r。转向ecu40在转向信号杆42向车辆50的左转方向偏斜时,使车辆50左侧的前后的转向信号灯44l闪烁,在转向信号杆42向车辆50的右转方向偏斜时,使车辆50右侧的前后的转向信号灯44r闪烁。从转向ecu40经由can52向lda ecu10输入转向信号杆42的偏斜信息。
50.<车道偏离防止控制例程>
51.接着,参照图2所示的流程图,对实施方式中的车道偏离防止控制例程进行说明。在图1中没有示出的lda开关接通时,根据图2所示的流程图的车道偏离防止控制由lda ecu10的cpu按预定的控制周期反复执行。此外,在以下的说明中,将车道偏离防止控制简称为“控制”。
52.首先,在步骤s10中,cpu进行标志foff是否为1的判定、即是否处于没在执行车道偏离预防控制的状态的判定。cpu在做出肯定判定时,使控制向步骤s60前进,在做出否定判定时使控制向步骤s20前进。此外,标志foff在控制的开始时被初始化为0,之后,如后所述按照图2所示的流程图设定为0或1。
53.在步骤s20中,cpu基于由摄像头传感器12检测出的车辆50相对于车道54的相对位置关系,以在本技术领域内公知的要领判定车辆是否有从车道偏离之虞。cpu在做出否定判定时暂时结束控制,在做出肯定判定时使控制向步骤s30前进。
54.在该情况下,车辆50是否有从车道偏离之虞的判定例如可以按以下的要领进行。首先,如图7所示,基于车辆50的前方的图像信息,推定车辆的行进方向62相对于车道54的长度方向60所成的角度(倾斜角)θy。车辆50向与车道54的长度方向60垂直的方向的移动速度vy基于角度θy和车速v而被推定为vsinθy。此外,角度θy与相对于白线56l和56r的倾斜角相同,因此也是车辆50的斜行角度。
55.另外,推定车辆50接近的一侧的白线56l(第一车道边界)与车辆的重心50a之间的车道宽度方向的距离dy(未图示)。再者,可以将δt作为预先设定的时间,在dy-vyδt为预先设定的基准值dyc(正的常数)以下时,判定为车辆50有从车道偏离之虞。
56.在步骤s30中,cpu进行驾驶员是否有意偏离车道的判定。cpu在做出否定判定时,使控制向步骤s50前进,在做出肯定判定时,在步骤s40中,将标志foff设定为1,以使得不执行车道偏离预防控制。
57.在该情况下,在由驾驶员进行了向车道偏离方向的转向信号杆42的偏斜操作和向车道偏离方向的转向操作中的至少一方时,cpu判定为驾驶员有意进行跨越车道边界的车道偏离。转向操作可以根据由扭矩传感器32检测出的转向扭矩ts的大小是否为基准值tsc以上或者转向轴30的旋转角度即转向角θ的大小是否为基准值θsc以上来判定。
58.此外,基准值tsc虽然可以是正的常数,但由于车速v越高则转向轮根据驾驶员的转向操作而转向时的转向阻力越小,因此以车速v越高则越小的方式根据车速可变地设定。因此,与基准值tsc恒定而与车速无关的情况相比,能够适当地进行驾驶员是否有意进行跨越车道边界的车道偏离的判定。
59.再者,例如因由于侧风、路面的横向倾斜等而车辆50受到横向力或者驾驶员的疏忽等故而车辆50相对于车道54不必要地斜行、产生车辆50从车道54偏离的可能的情况下的车辆50的斜行角度θy的大小较小。相对于此,驾驶员打算偏离车道的情况下的车辆50的斜行角度θy的大小较大。由此,cpu在车辆50的斜行角度θy的大小为基准角度θyc(正的常数)以上的情况下也判定为驾驶员有意进行跨越车道边界的车道偏离。
60.在步骤s50中,cpu执行车道偏离预防控制。即,cpu通过使警报装置18工作,发出表示车辆50有从车道偏离之虞这一意思的警报。另外,cpu通过向eps ecu20输出自动转向的指令信号,由eps装置22使转向轮24自动转向,以使得车辆50不从车道偏离。
61.在步骤s60中,cpu通过基于车速v参照图3所示的映射图,运算关于经过时间的基准值tc。如图3所示,基准值tc以车速v越高则越短的方式根据车速可变地设定。
62.另外,在步骤s60中,cpu进行车道偏离预防控制的恢复条件是否成立的判定。cpu在做出肯定判定时,使控制向步骤s80前进,在做出否定判定时,使控制向步骤s70前进。
63.在该情况下,cpu在下记的时间点a和b中的较早一方的时间点,判定为控制恢复条件成立。
64.时间点a:判定为从步骤s30中的判定从否定判定变为肯定判定的时间点、即驾驶员的车道偏离的意向从“无”变为“有”的时间点起经过了基准时间tc以上的时间时
65.时间点b:判定为车辆50跨越车道边界而完成了车道变更时、即基于车辆50与白线的相对位置关系判定为车辆50整体移动到车道变更目标的车道时
66.在步骤s70中,cpu进行驾驶员是否取消了偏离车道的意向的判定。cpu在做出否定判定时,使控制向步骤s90前进,在做出肯定判定时,在步骤s80中,将标志foff重置为0。此外,cpu在驾驶员使转向信号杆42回到非偏斜位置(中立位置)时或者在驾驶员进行了解除车道变更的转向操作时,判定为驾驶员取消了偏离车道的意向。
67.在步骤s90中,cpu通过基于车速v参照在图4中由实线示出的映射图,运算基准距离lsc。如图4所示,基准距离lsc以车速v越高则越大的方式根据车速可变地设定。
68.另外,在步骤s90中,cpu进行在车辆50的行进方向62的前方是否存在第二车道边界64(参照图8及图9)且从车辆的重心50a到第二车道边界的行进方向62的距离ls是否为基准距离lsc以上的判定。cpu在做出否定判定时,使控制向步骤s130前进,在做出肯定判定时,使控制向步骤s100前进。
69.在步骤s100中,cpu运算若车辆50跨越第二车道边界则车辆会变为危险状况的可能性的指标值id。再者,cpu进行指标值id是否为基准值idc(正的常数)以上的判定、即若车辆50跨越第二车道边界则车辆是否有变为危险状况之虞的判定。cpu在做出肯定判定时,使控制向步骤s130前进,在做出否定判定时,使控制向步骤s110前进。
70.在该情况下,cpu推定第二车道边界及其前面的状况,并以当车辆50跨越第二车道边界时车辆受的损害越大则越大的方式运算指标值id。例如,在当车辆50跨越第二车道边界时车辆会与围墙、护栏、树林等立体物碰撞的情况下,将指标值id运算为比车辆会到达道路以外的草地、碎石等非立体物的情况下大的值。另外,在当车辆50跨越第二车道边界时车辆会到达其他车道、路侧带、分岔路等道路的一部分的情况下,可以将指标值id运算为0或小的值。再者,在立体物为围墙、护栏、树林的情况下,可以将指标值id按该顺序运算为从小到大的值。再者,可以车速v越高则将指标值id运算为越大的值。
71.在步骤s110中,cpu通过基于车速v参照图5所示的映射图,运算基准速度vac。如图5所示,基准速度vac以车速v越高则越小的方式根据车速可变地设定。
72.另外,在步骤s110中,cpu基于摄像头传感器12和/或雷达传感器14的检测结果,运算车辆50相对于第二车道边界64的接近速度va(例如,重心50a与第二车道边界64之间的最短距离的减少率)。再者,cpu进行接近速度va是否为基准速度vac以上的判定。cpu在做出否定判定时,暂时结束控制,在做出肯定判定时,使控制向步骤s120前进。
73.在步骤s120中,cpu通过基于车速v参照图6所示的映射图,运算基准扭矩tac。如图6所示,基准扭矩tac以车速v越高则越小的方式根据车速可变地设定。
74.另外,在步骤s120中,cpu进行由扭矩传感器32检测出的转向扭矩ts的大小是否为基准扭矩tac以下的判定。cpu在做出否定判定时,暂时结束控制,在做出肯定判定时,使控制向步骤s130前进。
75.在步骤s130中,cpu针对第二车道边界64执行车道偏离预防控制。即,cpu通过使警报装置18工作,发出表示车辆50有跨越第二车道边界64之虞这一意思的警报。另外,cpu通过向eps ecu20输出自动转向的指令信号,由eps装置22使转向轮24自动转向,以使得车辆50不跨越第二车道边界64。
76.<实施方式的工作>
77.<c1.车辆50没有从车道偏离的可能的情况>
78.在步骤s10及s20中进行否定判定。由此,不进行车道偏离预防控制、即警报装置18的工作及转向轮24的自动转向。
79.<c2.车辆50有从车道偏离的可能但驾驶员无意偏离车道的情况>
80.在步骤s10中进行否定判定,在步骤s20中进行肯定判定,在步骤s30中进行否定判定。由此,在步骤s50中,执行车道偏离预防控制,因此能够通过警报装置18的工作及转向轮24的自动转向,防止车辆50从车道54偏离。例如,即使因由于侧风、路面的横向倾斜等而车辆50受到横向力或者驾驶员的疏忽等故而车辆50相对于车道54不必要地斜行、产生车辆50从车道54偏离的可能,也能够防止车辆50从车道54偏离。
81.<c3.车辆50有从车道偏离的可能且驾驶员有意偏离车道的情况>
82.在步骤s10中进行否定判定,在步骤s20及s30中进行肯定判定,在步骤s40中,将标志foff设定为1。由此,在转向信号灯44l或44r闪烁并且/或者转向扭矩ts为基准值tsc以上
和/或转向角θ的大小为基准值θsc以上的情况下,不执行车道偏离预防控制,之后在步骤s10中进行肯定判定。
83.<c3-1.车道偏离预防控制的恢复条件不成立且偏离车道的意向没有取消的情况>
84.在步骤s60及s70中进行否定判定。由此,不执行基于车道偏离预防控制的转向轮24的自动转向,因此驾驶员能够如愿执行车道变更等车道偏离。
85.<c3-1-1.距离ls为基准距离lsc以上而车辆50有变为危险状况的可能的情况>
86.在步骤s90及s100中进行肯定判定,在步骤s130中,针对第二车道边界64执行车道偏离预防控制。由此,通过警报装置18工作以及转向轮24自动转向,车辆50跨越第二车道边界64而从车道偏离之虞降低。
87.<c3-1-2.距离ls为基准距离lsc以上而车辆50没有变为危险状况的可能、但接近速度va为基准速度vac以上而转向扭矩ts的大小为基准扭矩tac以下的情况>
88.在步骤s90中进行肯定判定,在步骤s100中进行否定判定,在步骤s110及s120中进行肯定判定,在步骤s130中,针对第二车道边界64执行车道偏离预防控制。由此,与c3-1-1的情况同样地,通过警报装置18工作以及转向轮24自动转向,车辆50跨越第二车道边界64而从车道偏离之虞降低。
89.<c3-1-3.距离ls为基准距离lsc以上而车辆50没有变为危险状况的可能、接近速度va为基准速度vac以上、但转向扭矩ts的大小超过基准扭矩tac的情况>
90.在步骤s90中进行肯定判定,在步骤s100中进行否定判定,在步骤s110中进行肯定判定,但在步骤s120中进行否定判定,因此,不执行针对第二车道边界64的车道偏离预防控制。此外,可认为转向扭矩ts的大小超过基准扭矩tac是因为驾驶员希望车辆50跨越第一车道边界56l而接近第二车道边界64。
91.<c3-1-4.距离ls为基准距离lsc以上而车辆50没有变为危险状况的可能、接近速度va小于基准速度vac的情况>
92.在步骤s90中进行肯定判定,在步骤s100及s110中进行否定判定,因此,不执行针对第二车道边界64的车道偏离预防控制。此外,在接近速度va小于基准速度vac的情况下,车辆50在短时间内到达第二车道边界64的可能性低,因此针对第二车道边界64执行车道偏离预防控制的必要性低。
93.由以上的说明可知,在车道偏离预防控制的恢复条件不成立、偏离车道的意向没有取消、且距离ls为基准距离lsc以上的情况下,原则上不执行针对第二车道边界64的车道偏离预防控制。然而,在车辆50有变为危险状况之虞的情况下或者在接近速度va为基准速度vac以上且转向扭矩ts的大小为基准扭矩tac以下的情况下,针对第二车道边界64执行车道偏离预防控制。
94.<c3-1-5.距离ls小于基准距离lsc的情况>
95.在步骤s90中进行否定判定,在步骤s130中,针对第二车道边界64执行车道偏离预防控制。由此,与c3-1-1及c3-1-2的情况同样地,通过警报装置18工作以及转向轮24自动转向,车辆50跨越第二车道边界64而从车道偏离之虞降低。
96.<c4.车道偏离预防控制的恢复条件不成立但偏离车道的意向取消的情况>
97.在步骤s60中进行否定判定,但在步骤s70中进行肯定判定,在步骤s80中,将标志
foff重置为0,以恢复车道偏离预防控制。由此,在车辆50有从车道54偏离之虞时,与上述c2的情况同样地,在步骤s10中进行否定判定,在步骤s20中进行肯定判定,在步骤s30中进行否定判定。因此,在步骤s50中,执行车道偏离预防控制,所以能够通过警报装置18的工作以及转向轮24的自动转向,防止车辆50从车道54偏离。
98.<c5.车道偏离预防控制的恢复条件成立的情况>
99.在步骤s60中进行肯定判定,在步骤s80中,将标志foff重置为0,以恢复车道偏离预防控制。由此,在步骤s10中进行否定判定,所以执行步骤s20至s50。
100.<工作的具体例>
101.接着,参照图8及图9,分别说明以往的车道偏离防止装置以及实施方式的工作的具体例。此外,图8及图9表示了驾驶员希望进行从车道54向旁路66的车道偏离以使得车辆50从车道54跨越第一车道边界56l向旁路66移动的情况。另外,假设在车辆50位于在图8及图9中由实线示出的位置时,标志foff为1。
102.如图8及图9所示,旁路66相对于车道54以10
°
左右的角度倾斜而延伸。旁路66有第二车道边界64,在第二车道边界的外侧,作为立体物的围墙68沿着第二车道边界延伸。车辆50的行进方向62相对于第一车道边界56l和第二车道边界64分别以25
°
左右及15
°
左右的角度倾斜。由此,车辆50相对于第一车道边界56l的斜行角度θy的大小为基准角度θyc以上,但车辆50相对于第二车道边界64的斜行角度θy的大小小于基准角度θyc。
103.再者,相对于第二车道边界64,在车辆50的重心50a跨越第一车道边界56l之前的阶段,在步骤s10中进行否定判定,在步骤s20及s30中进行肯定判定,在步骤s40中,将标志foff设定为1。
104.在以往的车道偏离防止装置中,假设代替图2的步骤s70及步骤s90~s120,针对第二车道边界64执行与步骤s20及s30同样的步骤。在以往的车道偏离防止装置的情况下,即使判定为在车辆50前方有第二车道边界64,由于车辆50相对于第二车道边界64的斜行角度θy的大小小于基准角度θyc,因此也判定为驾驶员无意偏离车道。由此,会针对第二车道边界64执行车道偏离预防控制,因此,如在图8中由虚拟线所示的那样,转向轮24自动转向以使得车辆50的重心50a不接近第二车道边界64。因此,不可避免车道偏离预防控制在使车辆50按驾驶员的希望顺利向旁路66移动方面起到相反的效果。
105.相对于此,根据实施方式,在步骤s90中进行肯定判定,在步骤s100中进行否定判定。再者,在步骤s110中进行否定判定,或者在步骤s110及s120中分别进行肯定判定和否定判定。由此,不针对第二车道边界64执行车道偏离预防控制,因此,如在图9中由虚拟线所示的那样,车辆50能够按驾驶员的希望顺利地向旁路66移动。
106.此外,在上述的例子中,旁路66及第二车道边界64相对于第一车道边界56l倾斜地直线延伸。然而,如在图8及图9中由虚线所示的那样,旁路66及第二车道边界64也可以以逐渐离开第一车道边界56l的方式弯曲地延伸。另外,虽然图8及图9中没有示出,但车道54及车道边界56l、56r也可以以逐渐离开第二车道边界64的方式弯曲地延伸。
107.由以上的说明可知,根据实施方式,在驾驶员打算使车辆50向旁路66移动的情况下,不执行车道偏离预防控制。因此,没有转向轮24的自动转向干扰驾驶员的驾驶操作,警报装置18不工作,所以驾驶员能够如愿顺利地使车辆向旁路移动。
108.另外,根据实施方式,以车速v越高则基准距离lsc越大的方式,根据车速,可变地
设定基准距离(图4)。由此,与基准距离恒定而与车速无关的情况相比,车辆跨越第二车道边界的可能性较高,能够适当地进行是否需要针对第二车道边界执行车道偏离预防控制的判定。
109.另外,根据实施方式,在继续中止着车道偏离预防控制的执行的状况下,判定为若车辆50跨越第二车道边界64则车辆有变为危险状况之虞时,针对第二车道边界执行车道偏离预防控制。由此,能够通过车道偏离预防控制,降低车辆跨越第二车道边界而车辆变为危险状况的可能性。
110.再者,根据实施方式,在继续中止着车道偏离预防控制的执行的状况下,判定为车辆50向接近第二车道边界64的方向的转向扭矩ts为基准扭矩tac以下时,针对第二车道边界执行车道偏离预防控制。由此,能够在由于驾驶员的疏忽等导致车辆接近第二车道边界且车辆有跨越第二车道边界之虞的状况下,通过车道偏离预防控制,降低车辆跨越第二车道边界的可能性。
111.特别地,根据实施方式,在判定为车辆50接近第二车道边界64的速度va为基准速度vac以上并且车辆50向接近第二车道边界64的方向的转向扭矩ts为基准扭矩tac以下时,针对第二车道边界执行车道偏离预防控制。由此,能够在由于驾驶员的疏忽等导致车辆快速接近第二车道边界且车辆跨越第二车道边界的可能性高的状况下,通过车道偏离预防控制,降低车辆跨越第二车道边界的可能性。
112.再者,根据实施方式,以车速v越高则基准速度vac越小的方式,根据车速,可变地设定基准速度(图5)。由此,与基准速度恒定而与车速无关的情况相比,车辆跨越第二车道边界的可能性较高,能够适当地进行是否需要针对第二车道边界执行车道偏离预防控制的判定。
113.再者,根据实施方式,以车速v越高则基准扭矩tac越小的方式,根据车速,可变地设定基准扭矩(图6)。由此,与基准扭矩恒定而与车速无关的情况相比,能够适当地判定驾驶员是否通过转向操作打算使车辆向接近第二车道边界的方向移动。
114.再者,根据实施方式,在判定为车辆50到第二车道边界64的距离小于基准距离lsc时,针对第二车道边界执行车道偏离预防控制。另外,以若车辆跨越第二车道边界则车辆变为危险状况之虞越高则基准距离越大的方式,根据车辆变为危险状况之虞,可变地设定基准距离。由此,若车辆跨越第二车道边界则车辆变为危险状况之虞越高,越容易判定为车辆到第二车道边界的距离小于基准距离,能够有效地针对第二车道边界执行车道偏离预防控制。
115.再者,根据实施方式,以车速v越高则基准时间tc越短的方式,根据车速,可变地设定基准时间(图3)。由此,与基准时间tc恒定而与车速无关的情况相比,能够适当地判定控制恢复条件是否成立。
116.以上,针对特定的实施方式详细地说明了本发明,但本发明不限定于上述的实施方式,显然,对于本领域技术人员来说,可以在本发明的范围内实现其他各种实施方式。
117.例如,在上述的实施方式中,作为车道偏离预防控制,进行了基于警报装置18的工作的警报的发出以及基于eps装置22的转向轮24的自动转向。然而,也可以省略警报的发出和转向轮24的自动转向中的一方。
118.另外,在上述的实施方式中,如图3至图6所示,分别根据车速可变地设定关于经过
时间的基准值tc、基准距离lsc、基准速度vac和基准扭矩tac。然而,基准值tc、基准距离lsc、基准速度vac和基准扭矩tac中的至少一个也可以与车速v无关而恒定。
119.另外,在上述的实施方式中,在步骤s110中进行车辆50相对于第二车道边界64的接近速度va是否为基准速度vac以上的判定,并在进行肯定判定时,执行步骤s120。然而,也可以省略步骤s110,在步骤s100中进行否定判定时执行步骤s120。
120.再者,在上述的实施方式中,基准距离lsc是从车辆50的重心50a到第二车道边界64的在车辆的行进方向62上的距离,例如也可以是从车辆50的前端到第二车道边界64的在车辆的行进方向62上的距离。另外,基准距离lsc也可以是从车辆50的重心50a这样的基准位置到第二车道边界64的最短距离。
121.再者,在上述的实施方式中,基准距离lsc通过参照在图4中由实线示出的映射图而运算。如图4中由实线、点划线、双点划线所示的那样,也可以也根据当车辆50跨越第二车道边界时车辆被置于险境的危险程度,可变地设定基准距离lsc。在该情况下,也可以当车辆50跨越第二车道边界时,在车辆会到达道路以外的草地、碎石等非立体物的情况下,判定为车辆的危险程度比车辆会到达其他车道、路侧带、分岔路等道路的一部分的情况下高。另外,也可以当车辆50跨越第二车道边界时,在车辆会与围墙、护栏、树林等立体物碰撞的情况下,判定为车辆的危险程度比车辆会到达道路以外的草地、碎石等非立体物的情况下高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1