一种通过性强的轮式底盘及其机器人的制作方法
1.本发明涉及一种通过性强的轮式底盘及其机器人。
背景技术:
2.汽车的通过性是指它能以足够高的平均车速通过各种坏路和无路地带(如松软地面、凸凹不平地面等)及各种障碍(如陡坡、侧坡、壕沟、台阶、灌木丛、水障等)的能力。参考这一定义,并结合现今轮式机器人的主要应用场景和需求,可以认为轮式机器人底盘的通过性是指它能以足够高的平均速度通过各种坏路(如凸凹不平地面等)及各种障碍(如陡坡、侧坡、壕沟、台阶等)的能力。目前,一般通过爬坡能力、越障高度、过坎深度等指标来衡量机器人底盘的通过性。
3.受限于实际使用空间限制,部分轮式机器人底盘的长宽尺寸设计较小,相应的驱动轮尺寸也较小,越障能力一般。市场上长宽尺寸小于550*550mm的轮式机器人通用底盘所能越过的台阶型障碍高度一般在15mm左右。但在实际使用过程中,这并不能满足使用需求。
技术实现要素:
4.为解决上述技术问题,本发明提供了一种通过性强的轮式底盘,能较好地平衡侧向稳定性和越障能力性能。
5.本发明的另一个目的是提供一种采用上述通过性强的轮式底盘的机器人。
6.本发明采用以下技术方案:
7.一种通过性强的轮式底盘,包括底盘板和设置于所述底盘板上的轮组,所述轮组包括从前至后依次布置在所述底盘板上的前万向轮组件、驱动轮组件以及后万向轮组件;其中,
8.所述前万向轮组件包括可相对所述底盘板摆动的前万向轮摆臂组件和安装在所述前万向轮摆臂上的前万向轮;
9.所述驱动轮组件包括可相对所述底盘板摆动的驱动轮摆臂和设置在所述驱动轮摆臂上的驱动轮;
10.所述前万向轮摆臂组件和所述驱动轮摆臂之间设置有减震器组件。
11.优选的,所述减震器组件分别和所述前万向轮摆臂组件和所述驱动轮摆臂铰接。
12.优选的,所述前万向轮摆臂组件包括前万向轮摆臂和与所述前万向轮摆臂固定连接的前万向轮连杆,所述前万向轮连杆相对所述前万向轮摆臂弯折设置,所述减震器组件一端与所述前万向轮连杆铰接、另一端与所述驱动轮摆臂铰接。
13.优选的,所述前万向轮组件还包括与所述底盘板固定连接的前万向轮支撑座,所述前万向轮摆臂可轴向转动的与所述前万向轮支撑座连接,所述前万向轮连杆与所述前万向轮摆臂固定连接。
14.优选的,所述前万向轮支撑座设置有两个,两个所述前万向轮支撑座之间间隔设置,所述前万向轮支撑座上设置有轴孔,所述前万向轮摆臂穿过所述轴孔,所述前万向轮连
杆设置在两个所述前万向轮支撑座之间且轴向和轴向固定的套设在所述前万向轮摆臂上。
15.优选的,所述驱动轮组件包括与所述底盘板固定连接的驱动轮支撑座,所述驱动轮摆臂通过驱动轮支撑轴与所述驱动轮支撑座铰接。
16.优选的,所述驱动轮支撑座设有两个,两个所述驱动轮支撑座之间间隔设置,所述驱动轮支撑座上有轴孔,所述驱动轮支撑轴穿过所述轴孔并轴向固定在两个驱动轮支撑座上,所述驱动轮摆臂位于两个驱动轮支撑座之间且与所述驱动轮摆臂连接,所述驱动轮摆臂上设有用于使所述驱动轮支撑轴穿过的轴孔。
17.优选的,所述减震器组件与所述驱动轮摆臂通过第一铰接轴铰接,所述减震器组件与所述前万向轮摆臂组件之间通过第二铰接轴铰接。
18.优选的,所述减震器组件包括减震器套、减震器限位钉、减震器轴套、减震器弹簧、减震器轴以及减震器调节螺母,所述减震器套上有内螺纹和内孔,所述减震器套与减震器轴套之间通过螺纹连接,所述减震器轴套设有内孔,所述减震器轴穿过所述内孔与所述减震器轴套形成滑动连接,所述减震器轴一端与减震器限位钉之间通过螺纹连接,所述减震器弹簧套设在所述减震器轴上,所述减震器弹簧两端分别抵在减震器轴套和减震器调节螺母上,所述减震器调节螺母与减震器轴之间通过螺纹连接。
19.优选的,所述前万向轮组件设有两组,两组所述前万向轮组件独立设置,所述驱动轮组件设有两组,两组所述驱动轮组件独立设置,所述后万向轮组件设有一组。
20.优选的,所述前万向轮组件设有两组,所述驱动轮组件设有两组,两组所述前万向轮组件同轴设置,两组所述驱动轮组件同轴设置,两组所述前万向轮组件和两组所述驱动轮组件之间呈矩形分布或呈等腰梯形分布,所述后万向轮组件设有一组,所述后万向轮组件与两组所述前万向轮组件之间呈等腰三角形分布。
21.本发明还涉及一种机器人,其中,所述机器人采用如上所述的通过性强的轮式底盘。
22.优选的,所述机器人是在所述底盘板上加装电力巡检机器人组件的电力巡检机器人。
23.优选的,所述电力巡检机器人组件主要包括防跌落传感器、深度相机组件、充电组件、激光组件、云台组件、主控板、调试接口、工控机、以及电池组件。
24.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
25.1、本发明轮式底盘所采用的轴系和轮系布置能较好地平衡侧向稳定性和越障能力性能,通过性强;
26.2、在行进时,本发明轮式底盘能有效发挥驱动电机的动力,整机前进动力充沛;
27.3、本发明轮式底盘两侧独立的驱动减震系统布置,使整机能有效适应凸凹不平路面并提高行进平稳性;
28.4、本发明轮式底盘通过两侧驱动减震系统的机构弹性变形,使前万向轮和驱动轮均能有效接触压紧路面并提高其越障和过坎能力。
附图说明
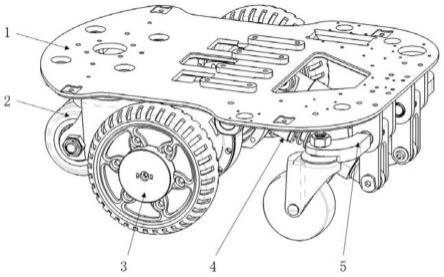
29.图1是本发明轮式底盘一侧的示意图;
30.图2是本发明轮式底盘另一侧的示意图;
31.图3是本发明底盘结构仰视示意图;
32.图4是图3中c-c处的剖视图;
33.图5是采用本发明底盘结构的巡检机器人;
34.图6是常用轮系布局的zmp许用范围(阴影区域);
35.图7是本发明轮式底盘简图;
36.图8是本发明前脚轮组件越过台阶型障碍示意图;
37.图9是本发明驱动轮组件越过台阶型障碍示意图。
具体实施方式
38.为进一步了解本发明的内容,结合附图及实施例对本发明作详细描述。
39.结合附图1,本实施例的一种通过性强的轮式底盘主要包括底盘板1、后万向轮组件2、驱动轮组件3、减震器组件4和前万向轮组件5。
40.结合图2-4,底盘板1整体为平板结构,是后万向轮组件2、驱动轮组件3、减震器组件4和前万向轮组件5的安装基体,前万向轮组件5、驱动轮组件3、后万向轮组件2从前至后依次布置在底盘板1上,其中,前万向轮组件设有两组,两组前万向轮组件同轴且独立设置,驱动轮组件设有两组,两组驱动轮组件同轴且独立设置,后万向轮组件设有一组,两组前万向轮组件和两组驱动轮组件之间呈矩形分布,在其他实施方式中,亦可以呈等腰梯形分布,后万向轮组件设有一组,后万向轮组件与两组前万向轮组件之间呈等腰三角形分布。也即整体上,本发明轮式底盘采用前、中、后三轴系统布置,并依次采用“2个万向轮+2个驱动轮+1个万向轮”的轮系布置方式。
41.具体的,后万向轮组件2主要包括后万向轮转接板21和后万向轮22,后万向轮转接板21分别与底盘板1、后万向轮22通过螺栓固定连接。
42.驱动轮组件3主要包括驱动轮支撑座31、驱动轮支撑轴32、驱动轮摆臂33、驱动轮支撑轴限位螺钉34、驱动电机壳35、驱动电机法兰36、驱动轮37。
43.驱动轮支撑座31在底盘两侧分别分布两个且间隔设置,且均与底盘板1通过螺栓固定连接。驱动轮支撑座31上有轴孔,驱动轮支撑轴32穿过该轴孔,并通过自身台阶结构和驱动轮支撑轴限位螺钉34在两个驱动轮支撑座31上形成轴向固定。驱动轮摆臂33位于两个驱动轮支撑座31之间,且其上也有轴孔,该轴孔中也穿过有驱动轮支撑轴32,前述轴孔与轴之间通过滚动轴承或塑料轴承连接,以减小转动摩擦系数。驱动轮摆臂33下方叉形结构与驱动电机壳35通过螺栓固定连接。驱动电机壳35与驱动电机36之间通过螺栓固定连接。驱动电机36的输出轴与驱动电机法兰37之间通过键连接。驱动电机法兰37与驱动轮38之间通过螺栓固定连接。驱动电机法兰37与驱动电机壳35之间通过轴承连接,以形成径向支撑并减小转动摩擦系数。前述驱动轮电机壳35到驱动轮38之间的结构可采用市场上常用的轮毂电机实现,亦可以采用其他合适的结构。
44.减震器组件4主要包括第一铰接轴41、减震器套42、减震器限位钉43、减震器轴套44、减震器弹簧45、减震器轴46、减震器调节螺母47、第二铰接轴48。减震器套42上有轴孔,第一铰接轴41穿过该轴孔,从而使减震器套42与驱动轮摆臂33形成转动连接。前述轴孔与轴之间通过滚动轴承或塑料轴承连接,以减小转动摩擦系数。减震器套42上有内螺纹和内孔,减震器套42与减震器轴套44之间通过螺纹连接。减震器轴套44采用摩擦系数小的耐磨
铜合金或工程塑料材料,其上有内孔,减震器轴46穿过该内孔,从而使减震器轴46与减震器轴套44形成滑动连接。减震器轴46一端与减震器限位钉43之间通过螺纹连接。减震器轴46中部还套有减震器弹簧45,减震器弹簧45两端分别抵在减震器轴套44和减震器调节螺母47上。减震器调节螺母47与减震器轴46之间通过螺纹连接。减震器轴46另一端有轴孔,第二铰接轴48穿过该轴孔,从而使减震器轴46与前万向轮连杆52形成转动连接。当第一铰接轴41和第二铰接轴48受力远离或接近时,减震器轴46将沿减震器轴套44轴向滑动,减震器弹簧45相对伸长或压缩,而减震器限位钉43对减震器轴套44的轴向滑动位移、减震器弹簧45的相对伸长位移或压缩位移起到限制约束作用。
45.前万向轮组件5主要包括前万向轮支撑座51、前万向轮摆臂52、前万向轮53、前万向轮连杆54、前万向轮连杆限位螺钉55。前万向轮支撑座51在底盘两侧分别分布两个,且均与底盘板1通过螺栓固定连接。前万向轮支撑座51上有轴孔,前万向轮摆臂52穿过该轴孔,且两者之间通过滚动轴承连接。前万向轮摆臂52末端有安装通孔,用以通过螺栓螺母连接安装固定前万向轮53。前万向轮连杆54呈倒u形结构,位于两个前万向轮支撑座51之间,并穿过前万向轮摆臂52,且通过前万向轮摆臂52上的销孔内安装的销钉实现轴向和周向定位。由此,当前万向轮53摆动时,将带动前万向轮摆臂52绕轴摆动,进而带动前万向轮连杆54摆动。
46.本发明的工作原理如下:
47.参考图6,根据零力矩点(zero moment point,zmp)理论,该种布置方式相较于常用的三轮布局和四轮菱形布局具有更好的侧向稳定性,即在转弯时不易侧向失稳导致侧翻。四轮方形布局和六轮布局的侧向稳定性最好,但六轮布局在小尺寸底盘上一般占用空间较大,难以布置悬挂减震机构,导致平稳性和通过性较差。而根据《汽车理论》中对汽车通过性相关内容的讲述,在相同动力配置和相同底盘尺寸下,整机质心点到驱动轮轴的距离越小,一般越障能力越强,故四轮方形布局的越障能力相对较弱。因此,本发明轮式底盘所采用的轴系和轮系布置能较好地平衡侧向稳定性和越障能力性能。
48.参考图7和图4,对本发明作简要受力分析可知,地面对驱动轮38的作用力fd水平向前,再对驱动轮摆臂33分析可知,驱动轮摆臂33将受到力矩mb作用使其有绕驱动轮支撑轴32逆时针转动的趋势,进而使得驱动轮38有向下压的趋势,即有增大驱动轮38对地面正压力的趋势。通俗地讲,这将进一步增大驱动轮38的抓地力和整机的前进驱动力,故在行进时,本发明轮式底盘能有效发挥驱动电机的动力,整机前进动力充沛。
49.本发明轮式底盘为对称布置,可实现原地转向(差速转向),转向半径小,适用于狭窄空间。
50.本发明轮式底盘行进在凸凹不平路面上时,由于驱动轮组件3、减震器组件4、前万向轮组件5所形成的驱动减震系统使得底盘板1及巡检机器人组件6与路面之间为弹性接触,且驱动轮38始终能与路面接触,从而保证了驱动轮38与路面之间的附着驱动力、避免驱动轮38不接触地面而空转,并通过该驱动减震系统的弹性变形和阻尼作用减轻底盘板1及巡检机器人组件6的上下振动,使整机行进时更加平稳。此外本发明的轮组为对称布置,且两侧的驱动轮组件3、减震器组件4、前万向轮组件5所形成的驱动减震系统相互独立,当行进在单侧凸凹不平路面上时,仅该侧的驱动减震系统发挥作用,此时也能保证整机行进时的附着驱动力和平稳性。
51.参考图8,本发明轮式底盘前万向轮53越过台阶障碍时,前脚轮组件5受到来自台阶的作用力而顺时针转动,进而压缩减震器组件4的减震器弹簧45,减震器组件4作用于驱动轮组件3,驱动轮摆臂33逆时针转动,使得驱动轮38压紧路面。参考图9,驱动轮38越过台阶障碍时,驱动轮摆臂33顺时针转动,进而压缩减震器组件4的减震器弹簧45,减震器组件4作用于前万向轮组件5,前脚轮组件5逆时针转动,使得前万向轮53压紧路面。因此在越障碍过程中,本发明轮式底盘的驱动减震系统能通过机构弹性变形,使得前万向轮53和驱动轮38均能有效接触压紧路面并具有较高的越障能力,而且底盘板1的转动角度小,即保证了越障过程中整机的平稳性。越过沟坎类障碍时,本发明轮式底盘仍能保证前万向轮53和驱动轮38均能有效接触压紧路面。
52.结合图5,图5所示是以本发明所述底盘板为基础,在其上加装巡检机器人组件6的一款电力巡检机器人具体实施例。巡检机器人组件6主要包括防跌落传感器61、深度相机组件62、充电组件63、激光组件64、云台组件65、主控板66、调试接口67、工控机68、电池组件69等。通过上述加装巡检机器人组件6的各模块或组件,该机器人可实现在不同地面道路上行进爬坡、避障越障、自主定位导航、任务巡检及记录等功能。可选地,本发明所述底盘亦可作为基础适用于消杀测温机器人、服务迎宾机器人、送餐机器人等。以本发明所述底盘为基础,在其上加装巡检机器人组件6的一款电力巡检机器人具体实施例,在实际样机设计和测试过程中,以350*350*550的长宽高外形尺寸、2.5寸前后万向轮、120mm小外径驱动轮的布置,成功越过25~30mm的台阶型障碍,明显超过现有通用底盘的越障性能。
53.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1