一种混合动力车辆爬行工况时异响的评价方法与流程
1.本发明涉及混动汽车技术领域,具体涉及nvh技术领域。
背景技术:
2.随着能源问题的日益凸显,新能源技术得到了飞速的发展,在新技术的研究中,各大公司均发布了不同架构的混动汽车。其中,p2电机架构是在发动机和双离合变速箱两者之间都加入一个离合器,从而实现纯电、混动、发动机直驱、动能回收和充电功能。爬行是起步的一种,具体指驾驶员松开制动踏板,让车辆从静止状态进入蠕行状态。
3.现有技术公开了一种抖动控制方法,根据混合动力车辆的状态信息,利用发动机、启动发电一体机和/或最大扭矩电机的目标转速,确定是否对发动机、启动发电一体机和最大扭矩电机中的一个或多个驱动装置进行扭矩补偿;当确定需要对发动机、启动发电一体机和最大扭矩电机中的一个或多个驱动装置进行扭矩补偿时,根据对应的扭矩补偿规则表对发动机、启动发电一体机和最大扭矩电机中需要补偿的驱动装置进行扭矩补偿。
4.此方法虽然对动力源的扭矩进行了补偿,但是发生抖动取决于多个参数,例如离合器的摩擦系数、油温、转速差等。当发生发动机转速波动较大、发动机转速过小等情况时也会导致汽车的抖动,显然现有技术提出的无法识别汽车抖动的原因,并针对原因实施对应的措施。
技术实现要素:
5.本发明的目的在于提供一种混合动力车辆爬行工况时异响的评价方法,以解决现有技术无法并针对抖动的具体原因实施对应的措施的问题。
6.为了实现上述目的,本发明采用的技术方案如下:
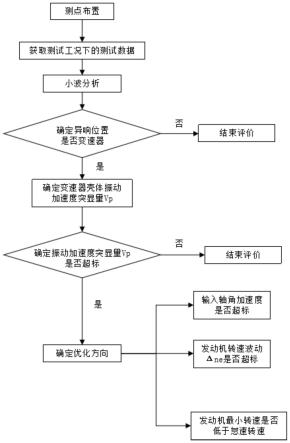
7.一种混合动力车辆爬行工况时异响的评价方法,所述评价方法具体为:
8.s1:令车辆处于爬行工况,定位异响发生的位置,若异响位置发生在变速器处,则进行s2,否则结束;
9.s2:判断变速器壳体振动冲击突显量v
p
是否超过标准值,若超过,则进入s3,否则结束;
10.s3:基于输入1轴角加速度发动机工作时的转速波动δne或者发动机工作时的最小转速 n
e-min
的一种或几种,评价产生异响的原因。
11.根据上述技术手段,通过定位异响发生的位置,锁定异响的源头,通过判定振动冲击突显量v
p
是否超过标准值的方式,决定是否需要通过优化的方式处理异响,通过输入1轴角加速度发动机工作时的转速波动δne或者发动机工作时的最小转速n
e-min
的一种或几种的因素,识别异响产生的具体原因,能够准确的评价爬行nvh性能是否合理达标。
12.进一步,当所述输入1轴角加速度超过第一预设值时,则判定异响是由于车辆发生抖动产生的传动系撞击所产生。
13.进一步,当所述发动机工作时的转速波动δne大于第二预设值时,则判定异响是
由于车辆的耸动所产生。
14.进一步,若发动机最小转速n
e-min
低于怠速,则判定异响是由于车辆的耸动所产生。
15.进一步,当所述输入1轴角加速度超过第一预设值时,首先获取补偿扭矩,通过补偿扭矩补偿离合器的动力源扭矩,补偿时间为1-2s。
16.进一步,所述补偿扭矩的获取方式为:踩住刹车,电机以目标转速输出扭矩,pcu会基于目标转速发出扭矩请求,从而使得tcu得到离合器相应的压力,进而得到对应的离合器扭矩t
c1real
,电机端会得到电机的执行扭矩t
motreal
,此电机的执行扭矩t
motreal
减去离合器的真实扭矩t
c1real
即为补偿扭矩t
off
。
17.进一步,所述动力源扭矩的获取方法为:获取电池的电量soc,当电量soc高于阈值时,动力源扭矩等于电机输出的爬行扭矩;当电量soc低于阈值时,动力源扭矩为发动机爬行扭矩与电机充电扭矩之差,所述爬行扭矩基于当前的驾驶模式、油温、车速来获取。
18.进一步,当所述发动机工作时的转速波动δne大于第二预设值时,需要提高发动机的怠速转速或者提高爬行工况时的发动机目标转速或者两者的结合。
19.进一步,当发动机最小转速n
e-min
低于怠速时,需要提高发动机的怠速转速或者提高爬行工况时的发动机目标转速或者两者的结合。
20.进一步,所述s1中,通过异响问题的数据,利用小波分析的方式对异响源进行定位。
21.本发明的有益效果:
22.本发明的评价方法用于评价爬行nvh性能是否合理达标,可快速锁定问题源头,并提供解决方案,稳定性好、可行性强,能够准确的测试、识别车辆爬行时的异响,同时此发明不需增加额外硬件,只需在软件层面做适当修改,就能对车辆爬行时出现的nvh问题进行优化,实现成本较低。
附图说明
23.图1为本发明流程图;
24.图2为试验车振动加速度传感器布置示意图;
25.图3为试验车机舱内传声器布置示意图;
26.图4小波分析示意图,其中(a)为近场声音频谱;(b)为发动机缸体声音频谱;(c)为变速机壳体频谱;
27.图5为混合动力汽车动力源扭矩获取方式示意图;
28.图6为混合动力汽车控制流程示意图;
29.图7为p2混合动力汽车动力结构示意图;
30.图8为本实施例中的优化前后的对比示意图。
31.其中,1—变速器,2—振动加速度传感器,3—发动机缸体,4—车辆机舱,5—传声器。
具体实施方式
32.以下将参照附图和优选实施例来说明本发明技术方案的实施方式,本领域技术人员可由本说明书中所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过
另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。应当理解,优选实施例仅为了说明本发明,而不是为了限制本发明的保护范围。
33.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
34.本实施例提出了一种混合动力车辆爬行工况时异响的评价方法,如图1所示,评价方法具体为:
35.s1:令车辆处于爬行工况,定位异响发生的位置,若异响位置发生在变速器处,则进行s2,否则结束。
36.该步骤中,如图2和图3所示,变速器1壳体处布置一个三向振动加速度传感器2、发动机缸体3处布置一个三向振动加速度传感器2、车辆机舱4布置一个传声器5采集近场声音。
37.然后获取测试工况下的测试数据:对试验车辆进行热车,使试验车辆行驶10分钟以上,以使传动系统各零部件温度在正常的工作温度范围内,进行试验车辆爬行工况测试。爬行工况为:驾驶人员松开制动踏板,让车辆由静止进入爬行状态,持续蠕行3秒后踩制动。在测试时车辆行驶的道路为平滑的沥青路面,且路面无积水和杂物,风速不大于5m/s。
38.根据车辆can信息采集设备实时读取车辆的油门踏板开度α(t)、车速信息v(t)、输入1轴转速 n
c1
(t)、发动机转速信息ne(t)、电机转速信息n
mot
(t)以及动力源转速信息n
p
(t),动力源扭矩t
pwr
(t)、离合器c1请求扭矩t
c1req
(t)、电机真实扭矩t
motreal
(t)。
39.车辆can信息采集设备包括常用的nvh专业数采前端及软件,如lms等,也包括具备总线can 分析功能的车载网络软、硬件,如vehicle spy等。
40.重复松制动踏板-蠕行这一过程,反复测试10次,采集数据10次,然后执行s03;
41.然后通过小波分析的方式,识别发生异响的位置,方法具体为:
42.任意选取一组异响问题的数据,利用时域与频域的联合分析对异响源进行分析定位。小波变换认为任何振动都是由一系列有一定起止时刻、有一定频带范围的小波合成;同时具有时域和频域局部化特征。假设信号f(t)∈l2空间,ψ(t)是基本小波或母小波函数,则信号的连续小波变换(cwt) 可定义为:
[0043][0044]
据此理论依据,对变速器壳体、发动机缸体处的振动加速度以及声学传感器的数据做小波分析来锁定异响发生位置。本实施例中,如图4的(a)-(c)所示,通过小波分析,可以看到,声学传感器采集到的近场声音图谱表明异响声音在松开制动踏板后出现“咔咔咔”三声,时间间隔0.12s,频段主要集中在3000-3800hz范围内,和变速器壳体振动加速度图谱有明显对应的时域及频域特征信号,而发动机缸体振动加速度图谱处无此对应特征,因此异响的源头可以锁定为变速器。
[0045]
若异响的源头不是变速器,则结束。
[0046]
s2:判断变速器壳体振动冲击突显量v
p
是否超过标准值,若超过,则进入s3,否则
结束。本步骤中,变速器壳体振动冲击突显量v
p
等于振动加速度g在[t1,t3]时间内的峰值v
max
与[t1,t3]时间内的振动均值v
avg
之差;t1表示车速v(t1)第一次大于0时的时间点,t3表示测试工况车速v(t3) 最大时的时间点。
[0047]
s3:基于输入1轴角加速度发动机工作时的转速波动δne或者发动机工作时的最小转速 n
e-min
的一种或几种,评价产生异响的原因。
[0048]
该步骤中,通过[t1,t3]时间内can信号采集的数据,来评价车辆的爬行nvh性能,包括输入1 轴角加速度发动机工作时转速波动δne以及发动机工作时最小转速n
e-min
,进一步锁定问题原因。
[0049]
评价的项目为:1.输入1轴角加速度超过500rad/s2后车辆发生抖动,异响是由于车辆发生抖动产生的传动系撞击产生;2.发动机转速波动δne=发动机转速最大值n
e-max-发动机转速最小值 n
e-min
,发动机转速波动》220rpm,容易发生耸动及异响;3.发动机最小转速n
e-min
低于怠速,可能造成熄火,发生耸动及异响。其中,500rad/s2为第一预设值,220rpm为第二预设值。
[0050]
当输入1轴角加速度超过500rad/s2时,优化方法为:获取补偿扭矩,通过补偿扭矩补偿离合器的动力源扭矩,补偿时间为1s-2s。
[0051]
补偿扭矩t
off
为离合器传递的请求扭矩t
c1req
和实际扭矩值t
c1real
的差值,其获得方法为:踩住刹车,相当于一端固定住,另一端电机以目标转速输出扭矩,pcu会发出不同的扭矩请求,tcu通过查表得到离合器相应的压力,得到对应的离合器扭矩t
c1real
,电机端会得到电机的执行扭矩t
motreal
。此电机的执行扭矩t
motreal
减去离合器的真实扭矩t
c1real
即为补偿扭矩t
off
。设定补偿扭矩t
off
的时间 t
off
,通常为1至2s,具体时间通过实车标定进行设定。
[0052]
补偿扭矩的获取方式为:踩住刹车,相当于一端固定住,另一端电机以目标转速输出扭矩, pcu会基于目标转速发出扭矩请求,从而使得tcu得到离合器相应的压力,进而得到对应的离合器扭矩t
c1real
,电机端会得到电机的执行扭矩t
motreal
,此电机的执行扭矩t
motreal
减去离合器的真实扭矩t
c1real
即为补偿扭矩t
off
。
[0053]
p2混合动力汽车爬行时,离合器c1滑磨、离合器c2分离,即t
c2
=0,离合器扭矩t
c1real
表示为:
[0054]
t
c1real
=sgn(δwc)μdf
c1
zrm[0055]
在混合动力车辆爬行时,爬行扭矩由车速与变速器油温查表而来,爬行扭矩决定了负载扭矩,负载扭矩查表得到离合器的请求压力p
c1req
,离合器请求压力p
c1req
决定了压紧力f
c1
。z为离合器的摩擦片副数,rm摩擦片的等效摩擦半径为设计值。μd为动摩擦系数,与转速差wc有关。
[0056]
因此,离合器实际传递扭矩t
c1real
可通过输入轴角加速度来进行评价。其值越大,说明离合器的请求扭矩与离合器的真实扭矩差值越大。
[0057]
如图5所示,动力源扭矩的获取方式如下:
[0058]
获取电池的电量soc,当电量soc高于阈值时,动力源扭矩等于电机输出的爬行扭矩;当电量 soc低于阈值时,动力源扭矩为发动机爬行扭矩与电机充电扭矩之差,爬行扭矩基于当前的驾驶模式、油温、车速来获取。
[0059]
具体的:在某一个具体的实施例中,以图5和图7作为说明,在p2混动车辆爬行时的
工作模式及动力源扭矩的决定方式,首先获取车辆蓄电池的电量信息:
[0060]
电量soc高于阈值时,仅电机输出爬行扭矩,此时离合器c0打开,离合器c1结合。此时的动力源扭矩等于电机输出的爬行扭矩。
[0061]
电量soc低于阈值时,仅发动机输出爬行扭矩,此时离合器c0及c1均结合,发动机分一部分扭矩用于电机充电。此时动力源扭矩为发动机爬行扭矩-电机充电扭矩。
[0062]
根据图6所示,动力源扭矩决定了pcu发出的负载扭矩请求,离合器的请求扭矩与pcu发出的负载扭矩请求是查表关系。
[0063]
在车辆验证阶段,离合器的请求扭矩处于开环状态,若为了消除异响单纯的加大爬行扭矩,会导致离合器的请求扭矩也跟着增大。通过扭矩补偿的方法,既可以提升离合器前端的扭矩,又不会使离合器后端扭矩跟着改变,不会造成太大的改动,影响其他参数,节省人力物力。
[0064]
若是发动机转速波动(发动机转速波动δne=发动机转速最大值n
e-max-发动机转速最小值 n
e-min
,)》220rpm,判定是由于耸动造成的异响,则需要提高发动机的怠速转速或者提高爬行工况时的发动机目标转速或者两者的结合。这是由于目标转速提高后,起步时,发动机掉转速才不会掉太多,怠速高也会迅速的达到目标转速。
[0065]
当发动机最小转速n
e-min
低于怠速转速时,可能造成熄火,判定是由于耸动造成的异响。则需要提高发动机的怠速转速或者提高爬行工况时的发动机目标转速或者两者的结合。这是由于目标转速提高后,起步时,发动机掉转速才不会掉太多,怠速高也会迅速的达到目标转速。
[0066]
因此,以上评价指标,一个或多个超标均能锁定为软件问题,需要修改控制参数,而无需进行其他方面的排查。
[0067]
针对某车型,优化前如图8的(a)所示,该车存在异响,经测试并锁定异响位置在变速器,通过计算得到的变速器壳体加速度振动突显量vp大于3g,对其余控制指标计算:输入1轴角加速度为 816rad/s2,发动机转速波动量247rpm,发动机最小转速值低于怠速。通过补偿扭矩,如图8的(b) 所示,提升松刹车后的发动机目标转速及发动机怠速进行优化,经测试并计算的变速器壳体加速度振动突显量降至3g,主观评价无异响。
[0068]
以上实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1