一种纯电动汽车在不同工况下驱动系统优化控制方法与流程
1.本发明涉及纯电动汽车提速动力及最大续驶里程,尤其涉及一种动力系统匹配以及不同运行状态下运行优化方法。
背景技术:
2.自工业革命以来,全球的能源消耗急速增长,引起了严峻的能源枯竭和环境污染问题。汽车工业面临快速发展机遇的同时其对石油资源需求的激增和对环境保护的负面影响也日益引起人们的关注。纯电动汽车在解决环境污染和能源短缺问题上有着无可比拟的优势,它已成为汽车产业中的新生主力军。
3.纯电动汽车通常是指用蓄电池作为动力源,用电动机替代发动机,符合车辆安全指标与满足工况行驶条件的汽车。与传统燃油车相比较,纯电动汽车的主要优点表现为零排放对环境无污染、能量来源广、行驶噪声小、制动时可以高效回收能量等;而其缺点也显而易见,续驶里程短、动力性能较弱、价格较燃油车更贵等。
4.为了改善了驾驶体验和行车的安全性,提升了车辆加速与最高车速性能,增加了最大续驶里程数,现有的技术主流趋势是在电动汽车部件的性能上完成质的突破,比如研发出新型车身材料、能量密度很高的车载蓄电池,不仅能够实现整车轻量化来提升其动力上的性能,而且能够大大改善电动汽车的续航性能,然而这种技术上的突破需要花费很长的时间以及很高的成本,实现起来比较困难;因此对电动汽车发展的关键技术及控制策略进行优化处理来提升整车性能包括改善驾驶体验和行车安全性能,提升车辆动力、续航性能等,是本领域技术人员亟需解决的问题。
技术实现要素:
5.本发明提出一种纯电动汽车在不同工况下驱动系统优化控制方法,弥补基于纯电动汽车续驶里程短、动力性能较弱等缺点,在一定程度上改善了驾驶体验和行车的安全性,提升了车辆加速与最高车速性能,增加了最大续驶里程数。
6.本发明所要解决的技术问题采用以下的技术方案来实现:
7.一种纯电动汽车在不同工况下驱动系统优化控制方法,通过建立电动汽车动力学模型,同时采用电动机-驱动桥整体式驱动模式将永磁直流电动机应用于纯电动汽车驱动系统,实现机电的有机结合;结合性能指标,对驱动电机、动力蓄电池组、总传动比参数进行了合理匹配;围绕电动汽车提速动力及最大续驶里程问题,在正常行车加速、能量限制以及制动回能三种运行状态下,优化了加速转矩补偿,车速调控,最大再生制动力分配。
8.作为上述方案的进一步改进,正常行车模式下,将加速意图以及蓄电池的荷电状融入到模糊算法中来控制驱动电机的输出转矩,进而改善纯电动车提速动力性能。
9.作为上述方案的进一步改进,在能量限制模式下,根据电动汽车行驶时能量平衡特性,优化了车速调控算法,分析理论剩余里程下的建议车速,在一定程度上解决了因能量不足无法行驶至目的地的尴尬,改善了驾驶体验。
10.进一步地,在制动回能模式下分析了制动强度和行车安全性的关系,结合前、后轮制动力分配曲线-i曲线(理想的制动力分配曲线)和ece曲线(欧洲典型驾驶循环工况曲线),优化了最大再生制动力的分配。
11.进一步地,在电动汽车模型下进行仿真实验,验证加速转矩补偿模糊策略以及最大再生制动力分配策略有效性,判断在一定程度上能否改善驾驶者的驾驶体验和行车的安全性能,同时提升了整车在加速、最大行驶车速上的性能以及最大续航能力。
12.与现有技术相比,本发明提出了一种纯电动汽车在不同工况下驱动系统优化控制方法,具有以下有益效果:
13.1、本发明为了弥补基于纯电动汽车续驶里程短、动力性能较弱等缺点,通过对电动汽车动力系统匹配以及运行优化技术进行优化处理来提升整车性能,包括改善驾驶体验和行车安全性能,提升车辆动力、续航性能等。在这些关键技术经过理论分析及实验测试,验证了优化后的参数及控制策略在一定程度上改善了驾驶体验和行车的安全性,提升了车辆加速与最高车速性能,增加了最大续驶里程数。
14.2、本发明采用机电融合的思想,用电动机-驱动桥整体式驱动模式将永磁直流电动机应用于纯电动汽车驱动系统,取消了离合器和变速器,但具有减速差速机构,由一台电动机驱动前两车轮旋转。
15.3、本发明将驾驶者的加速意图与蓄电池的荷电状态融入到模糊算法中,来实时控制电动汽车行驶过程中驱动电机的输出转矩,在原输出转矩的基础上适当补偿加速转矩来改善车辆的动力性能。
16.4、本发明通过分析车辆制动时前、后轮所受到的制动力关系,根据制动强度的大小来分配前驱动轮上的制动力,设计了一种基于制动强度z的最大再生制动力分配策略,当车辆进行制动回能时,能够充分的回收制动能量,进而改善车辆的续航性能。
附图说明
17.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图;
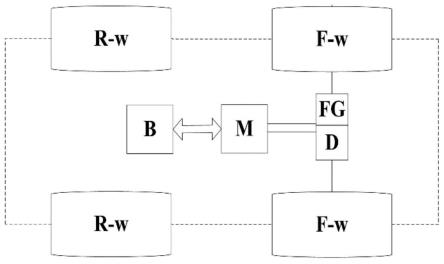
18.图1为动力系统布局结构示意图;
19.图2为加速转矩补偿模糊控制器示意图;
20.图3为加速踏板开度a(%)示意图;
21.图4为加速踏板开度变化率s(%)示意图;
22.图5为蓄电池荷电状态soc示意图;
23.图6为加速转矩补偿系数k示意图;
24.图7为输入、输出量之间的曲面三维图示意图;
25.图8为不同控制策略下电机实际输出的转矩图示意图;
26.图9为以不同车速匀速行驶下的续驶里程示意图;
27.图10为车辆制动时的受力分析示意图;
28.图11为最大再生制动力分配图示意图;
29.图12为制动力分配策略流程图示意图;
30.图13为不同制动力分配策略下的soc变化情况示意图。
具体实施方式
31.下面结合附图和实施例对本发明进一步说明。
32.步骤1、请参阅图1,本发明提出一种纯电动汽车在不同工况下驱动系统优化控制方法,对纯电动汽车动力系统的结构进行合理布局,动力系统的布局结构对能量传递与回收起着重要的作用,影响着整车的性能,包括续航能力和提速能力;纯电动汽车动力系统布局结构在同轴型电动机-驱动桥整体式布局的基础上,采用固定速比传动系统和驱动半轴构成的,将驱动电机,固定速比变速器和差速器整合在一起,集成度更高,用两个驱动半轴连接着车辆的两个驱动轮,整个传动系统更加的紧凑,传动效率进一步提高,更加方便安装具有很好的互通性。图1中m为驱动电机;fg为固定速比变速器;d为差速器;f-w为前轮;r-w为后轮;b是蓄电池组。
33.步骤2、动力系统关键部件的合理选型及参数匹配是电动汽车拥有良好性能的基础,以纯电动汽车的动力性能评价指标与经济性能评价指标依据,对应用在动力系统的驱动电机,固定速比传统系统,动力蓄电池组进行参数匹配,为下文的纯电动汽车在不同工况下驱动系统优化控制方法研究做铺垫。
34.步骤3、在完成了动力系统关键部件的选型及参数匹配后,针对纯电动汽车的运行模式做出合理有效的控制策略是保证车辆能够拥有良好性能的关键所在。为了改善电动汽车动力性能及最大续航性能,在正常行车加速、能量限制、制动回能三种运行模式下,优化了加速转矩补偿、车速调控、最大再生制动力分配。
35.步骤4、正常行车模式下加速转矩补偿模糊策略,是为了改善电动汽车的提速动力性能,将驾驶者的驾驶意图通过控制器充分反映到蓄电池和驱动电机上。模糊控制器的输入量有加速踏板的开度a及其变化率s(反映加速意图),电动汽车当前蓄电池荷电状态soc值(反映能量状态),输出量为加速转矩补偿系数k(弥补动力输出),图2为整体设计思路框图。
36.步骤4-1、加速踏板的开度值最大为100%,a为当前加速踏板的开度值,t为a开度下的基本需求转矩,其计算公式为:
[0037][0038]
其中,t
n_max
表示当前转速下对应的最大输出转矩;ne表示驱动电机的基转速。
[0039]
步骤4-2、加速踏板开度变化率s由加速踏板当前的开度值app(k)和上一个限定步长的开度值app(k-1)的信号变化增量获得,即:
[0040][0041]
式中δapp(k)为计算时的限定步长。
[0042]
步骤4-3、对输入量和输出量进行模糊子集划分,将a分为{vs(很小)、s(小)、m(中)、b(大)、zb(最大)},模糊论域(0,100%);将s也分成{vs(很小)、s(小)、m(中)、b(大)、zb(最大)},模糊论域(0,100%);soc分为{l(低)、m(中)、h(高)},在soc低于0.2时,汽车进
入能量限制模式,将模糊论域设为(0.2,1);输出量加速转矩补偿系数k分为{s(小)、m(中)、b(大)},设定模糊论域为(1,1.2);输入、输出量的隶属度计算模型如图3至图6所示。
[0043]
步骤4-4、在车辆提速过程中,判断加速踏板的开度a、加速踏板开度变化率s以及蓄电池的荷电状态soc,来综合考虑驾驶意图以及车辆当前的状态。加速踏板的开度变化率s最能反映出驾驶意图,s值较大,则驾驶者的加速意图强烈,此时应在驱动电机基础的输出转矩上适当多补偿加速转矩的值,即如图7所示,当s的值越趋近100%时,k的值就越大。通过该策略来改善车辆的提速动力性能,尤其在中高速加速性能上会提升的较明显,对最高车速性能也应有一定的提升。
[0044]
步骤4-5、加速转矩补偿模糊策略的仿真验证,对纯电动汽车在模糊策略和原始的控制策略在同一个循环工况下运行一个周期,不同控制策略下驱动电机实际输出的转矩仿真验证对比如图8所示。
[0045]
由仿真图可以看出,使用加速转矩补偿模糊控制策略可以使驱动电机在原来实际输出转矩的基础上得到适当补偿,输出转矩增大时,加速转矩补偿系数k值亦增大,原始控制策略最大输出转矩约为113n
·
m,加速转矩补偿模糊策略最大的输出转矩约为125n
·
m,驱动电机整体实际输出的转矩值提高了约10.6%。
[0046]
步骤5、能量限制模式的车速调控算法,目的是使驾驶者清楚的知道在理论剩余里程下的建议车速,可以提前做出相应的应对措施,最大可能的解决电动汽车行驶过程中因能量不足无法达到目的地的尴尬,在一定程度上改善驾驶体验。
[0047]
步骤5-1、车辆行驶的功率平衡状态为:
[0048][0049]
由能量传递关系可得:
[0050]
pe=pm=pbnmꢀꢀꢀ
(4)
[0051]
其中,pm表示有效功率输出值;nm表示整个电机及其控制器的效率系数;
[0052]
由公式(3)、(4)计算出车辆整体能量平衡的公式,可表示为:
[0053][0054]
步骤5-2、根据车辆仪表上显示的当前蓄电池剩余电量qs,计算出蓄电池在当前的剩余能量ws,即:
[0055][0056]
其中,ws(c,t)为c温度t时刻下的剩余能量;v
t
当前蓄电池的电压;v
dc
为蓄电池放电结束后的电压。
[0057]
步骤5-3、在c温度t时刻下剩余里程的理论计算值为:
[0058][0059]
其中,s(c,t)为剩余里程的理论计算值;ks为参考标定的能量耗率。
[0060]
参考的能量消耗率ks的计算公式为:
[0061]
[0062]
其中,e为电动汽车充电期间从电网中获取的能量(wh);d为电动汽车充满电后行驶的距离。通过参数匹配,算出ks=1.49wh/km。
[0063]
步骤5-4、假设某一时刻驾驶者以建议速度uc开始行驶,则剩余里程s(c,t)与建议车速uc之间的关系为:
[0064][0065]
步骤5-5、以蓄电池的电量20%为临界值,则剩余电量的计算公式为:
[0066]qs
=0.2q
ꢀꢀꢀ
(10)
[0067]
其中,q为蓄电池组的初始电量;由车辆装置的蓄电池组的规格,可计算出剩余电量qs,由式(6)和式(10)即可得出剩余能量ws(c,t)的值。
[0068]
步骤5-6、将ks和ws(c,t)的值带入式(9)中即可算出理论剩余里程s(c,t)=30.06km。
[0069]
由整车参数以及计算出的ws(c,t),s(c,t),将数值带入式(9)中,得出在理论剩余里程中的建议车速uc=32.88km/h。
[0070]
步骤5-7、从能量消耗的方面分析,假设车辆当前以速度ua匀速行驶时,续驶里程受到蓄电池放电效率,比能量等因素影响,即:
[0071][0072]
将蓄电池的特性参数以及整车参数全部带入到式(11)中,得到汽车以不同速度等速行驶时,速度与最大续驶里程之间的曲线图。
[0073]
通过速度调控策略算法计算的建议车速uc与图9最佳车速(34.7km/h)的误差在2km/h之内,表明建议车速处于一个最佳的速度范围内,进一步说明此算法的合理性,即在能量限制模式下电动汽车能够行驶更大的续驶里程数。
[0074]
步骤6、制动回能模式下制动力分配策略,目的是在确保驾驶者可以安全行车的前提下,尽可能的由再生制动来提供制动力,不仅能够增加车辆的最大续驶里程数改善经济性能,而且可以减少因长期机械制动给制动踏板带来的损耗,延长汽车部件的使用寿命。
[0075]
步骤6-1、由电动汽车行驶时的受力特性可知,制动强度z在数值上存在一个极限值,理论上其最大值可达到车辆的附着系数且当z在数值上的大小越接近时,就能越充分利用到制动力,制动减速效果就理想。制动强度z表达为:
[0076][0077]
其中,a为制动时的减速度;g为重力加速度。
[0078]
步骤6-2、最大再生制动力分配策略,在平路上正常行驶的汽车,受力情况如图10所示,制动时前、后轮的受到地面的反向作用力fz1、fz2为:
[0079]
前、后轮的受到地面的反向作用力f
z1
、f
z2
为:
[0080][0081]
其中,la为前轮到质心的距离;lb为后轮到质心的距离;hg为质心高度。
[0082]
步骤6-3、当汽车在进行制动时,前、后轮同时达到抱死状态,前、后轮受到的制动力满足的关系式为:
[0083][0084]
其中,f
bf
表示前轮受到的制动力;f
br
表示后轮受到的制动力。
[0085]
将式(13)带入式(14)中,得到的曲线方程称为理想的制动力分配曲线又称为i曲线,其可表示为:
[0086][0087]
步骤6-4、根据ece制动法规,对于普通轿车而言,当路面附着系数处于时,对于制动强度z需要满足:
[0088][0089]
步骤6-5、根据汽车的特性,前轴的附着系数曲线在后轴上,ece制动法规的曲线的表达式为:
[0090][0091]
步骤6-6、确保汽车能够安全驾驶,前、后轮总制动力的分配点要落到ece制动法规曲线和i曲线之间,只有前轮能够实现再生制动,为了保证回收更多的制动能量,尽量使得汽车的前驱动轮分配到更多的制动力,所设计的最大再生制动力的分配策略如图11中o-a-b-c-d所示。
[0092]
图12横坐标表示的是前驱动轮受到的制动力,纵坐标表示后轮受到的制动力,其中bc表示前驱动轮的抱死曲线,b点是前轮抱死曲线与ece曲线交点,c点是与i曲线的交点。
[0093]
步骤6-7、通过流程图来说明本发明基于制动强度z所设计的最大再生制动力分配策略,如图12所示。
[0094]
其中,treq表示所需要的制动转矩,tr为再生制动转矩,freq表示汽车所需的制动力,f_rbf表示前轮再生制动转矩产生的制动力,f_mbf表示前轮机械制动转矩产生的制动力,f_brm表示后轮机械制动转矩产生的制动力。
[0095]
根据电动汽车制动时,前、后轮所受制动力的情况,分析出理想状态下的制动力分配曲线与能够安全行车状态下的ece制动力分配曲线,结合由前轮驱动的电动汽车,基于制动强度设计出最大再生制动力的分配方案,当车辆进行制动时,能够充分的回收制动能量,来增加车辆的最大续驶里程数。
[0096]
步骤6-8、最大再生制动力分配策略仿真验证,在最大再生制动力分配策略和原始的控制策略在同一个循环工况下运行一个周期,通过纯电动汽车在不同的制动力分配策略
下soc的变化情况,观察能量回收的情况。
[0097]
由图13可得,汽车由制动强度判别的制动力分配制动策略时,soc从1降到了0.93左右,下降了0.07;而原始分配策略下,soc从1降到了0.92左右。一个循环周期下整体能量回收的效率提升1%左右,当汽车行驶的距离越远时,整体能量回收值就变得越可观,汽车的续驶里程就能够得到提升。
[0098]
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一。如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1