车辆的报知控制装置的制作方法
本发明涉及在自身车辆转弯时有可能与对向车辆发生碰撞的情况下向自身车辆的驾驶员报知该对向车辆的存在的车辆的报知控制装置。
背景技术:
1、以往以来,已知有一种在检测到有可能与自身车辆发生碰撞的其他车辆的情况下,进行避免与该其他车辆的碰撞、减轻由碰撞引起的冲击的控制即碰撞避免控制的装置(以下,称为“以往装置”)。碰撞避免控制例如包括向自身车辆的驾驶员发出警报的警报控制、和自动地对自身车辆施加制动力的自动制动控制。以下,也将“自身车辆与其他车辆发生碰撞的可能性”称为“碰撞可能性”。
2、以往装置基于自身车辆的预测轨道和其他车辆的预测轨道来判定有无碰撞可能性。具体而言,以往装置基于自身车辆的速度和偏航率来运算自身的转弯半径,基于该转弯半径来运算自身车辆的预测轨道,并且基于其他车辆的位置的推移来运算其他车辆的预测轨道。在两者的预测轨道交叉时,以往装置判定在假定自身车辆和其他车辆维持当前的移动状态进行移动的情况下两者是否会发生碰撞(即,自身车辆与其他车辆分别到达两个预测轨道的交点的定时是否大致相同)。在判定为自身车辆与其他车辆会发生碰撞(即,自身车辆与其他车辆分别到达上述交点的定时大致相同)的情况下,以往装置运算预测为直到自身车辆与其他车辆发生碰撞为止所需的时间(换言之,直到自身车辆到达上述交点为止所需的时间)即碰撞预测时间(ttc:time to collision),在ttc为预定的ttc阈值以下的情况下,判定为存在碰撞可能性并执行碰撞避免控制。
3、更详细而言,碰撞避免控制分两个阶段执行。即,以往装置在ttc成为预定的第1ttc阈值以下的情况下,首先执行警报控制。然后,在即使执行警报控制ttc也持续减少并成为第2ttc阈值(比第1ttc阈值小的值)以下的情况下,执行自动制动控制。根据该构成,通过执行警报控制,驾驶员能够识别其他车辆的存在的可能性变高,所以认为能够进行用于避免与该其他车辆的碰撞的驾驶操作,能够降低执行自动制动控制的频度。
4、这样的跨及两个阶段的碰撞避免控制在自身车辆直行的期间中能够适当地执行,但在自身车辆右转时不能适当地执行的可能性高。
5、即,如上所述,以往装置以自身车辆与其他车辆的预测轨道交叉为前提来判定有无碰撞可能性,所以在两者的预测轨道不交叉时根本不进行有无碰撞可能性的判定。在自身车辆右转时,驾驶员将方向盘向右转进行操舵操作,但在开始右转后的短暂期间内(以下,也称为“第1期间”)偏航率小,所以转弯半径大,结果,第1期间内的预测轨道相比于右转时的实际的轨道成为大转弯的形状(曲率小的形状)。因此,在第1期间内,自身车辆的预测轨道向其他车辆(典型的是,对向车辆)的后方区域延伸的倾向变高,难以与其他车辆的预测轨道交叉。因此,在第1期间内难以进行判定有无碰撞可能性的处理。此外,以下,在关于右转时的说明中,不记为“其他车辆”而记为“对向车辆”。
6、之后,当偏航率增大而转弯半径逐渐变小时,自身车辆的预测轨道与对向车辆的预测轨道交叉,所以进行有无碰撞可能性的判定处理。然而,在该时间点自身车辆已经进行了一定程度的转弯,所以即使判定为存在有碰撞可能性的对向车辆,ttc也很有可能已低于第1ttc阈值,而与第2ttc阈值同等或成为第2ttc阈值以下。换言之,同时执行警报控制和自动制动控制的可能性高。因此,在自身车辆右转时,不能跨及两个阶段地适当地执行碰撞避免控制的可能性高,结果,驾驶员无法基于警报控制进行用于避免与对向车辆的碰撞的驾驶操作。
7、因此,对在右转时,也能够在比自动制动控制早的定时执行“向驾驶员报知对向车辆的存在的控制(以下,称为“报知控制”)”的技术进行了研究。例如,在专利文献1中记载了与对右转时的驾驶员的安全确认作业进行辅助的车辆的右转时安全确认系统相关的技术。具体而言,该系统具备对向车状态检测单元和碰撞可能性判断单元,所述对向车状态检测单元检测存在于对向车道的对向车辆的状态,所述碰撞可能性判断单元在自身车辆停止且右方向指示器点亮时,基于对向车辆的状态来判断右转时的碰撞可能性。并且,构成为,当自身车辆在使右方向指示器点亮了的状态下停止时(例如,在交叉路口的右转停止线的位置停止时),通过碰撞可能性判断单元基于对向车辆的状态来判断右转时的碰撞可能性,在判断为有碰撞可能性的情况下,对驾驶员发出警告。
8、现有技术文献
9、专利文献
10、专利文献1:日本特开2004-280453号公报
技术实现思路
1、专利文献1的系统是专用于在自身车辆停止时在比自动制动控制早的定时对驾驶员发出警告的技术,但在不论自身车辆是否处于停止状态,都会在比自动制动控制早的定时执行报知控制的情况下,有可能产生不必要工作。即,由于在右转的过程中的较早的阶段判定是否执行报知控制,所以难以准确地判定有无碰撞可能性,甚至对于实际上碰撞可能性极低的对向车辆,也有可能执行不必要的报知控制。此外,“实际上碰撞可能性极低的对向车辆”例如是从自身车辆看来在较远处移动的对向车辆、或在自身车辆右转的过程中通过慢行或将来暂时停止(不与自身车辆碰撞)而经过自身车辆的附近的对向车辆。由于报知控制的不必要工作会让自身车辆的乘员感到烦躁,所以希望开发能够抑制这样的不必要工作的技术。
2、此外,上述的问题可能发生在规定了左侧通行的国家(采用对向车道相对于行驶车道位于右方的车道布局的国家)。在规定了右侧通行的国家(采用对向车道相对于行驶车道位于左方的车道布局的国家)中,通过将上述记载的“右”替换为“左”来说明可能产生同样的问题的情况。
3、本发明是为了应对上述的问题而做出的。即,本发明的目的之一在于提供能够兼顾在转弯时在比自动制动控制早的定时执行报知控制和抑制该报知控制的不必要工作的车辆的报知控制装置。此外,“转弯时”在规定了左侧通行的国家中意味着“右转时”,在规定了右侧通行的国家中意味着“左转时”。
4、本发明的车辆的报知控制装置(以下,称为“本发明装置”)具备:
5、周围信息取得装置(11),能够取得关于存在于自身车辆(v)的前方的立体物和在所述自身车辆的前方延伸的对车道进行规定的区划线的信息作为周围信息;
6、方向指示器开关(12),能够检测为了使方向指示器工作而由自身车辆的驾驶员操作的操作器(wl)的操作状态;
7、车速检测装置(13),能够检测所述自身车辆的车速(v);
8、驾驶操作状态检测装置,包括操舵输入值检测装置(14)和制动开关(114)中的至少一方,所述操舵输入值检测装置(14)对基于由所述驾驶员进行的操舵操作的输入值即操舵输入值(θs)进行检测,所述制动开关(114)对有无由所述驾驶员进行的制动操作进行检测;
9、报知装置(21、22),能够执行报知动作;以及
10、控制单元(10),能够控制所述报知装置,
11、所述控制单元构成为,
12、当将对向车道相对于所述自身车辆所在的行驶车道所处的方向规定为特定方向时,
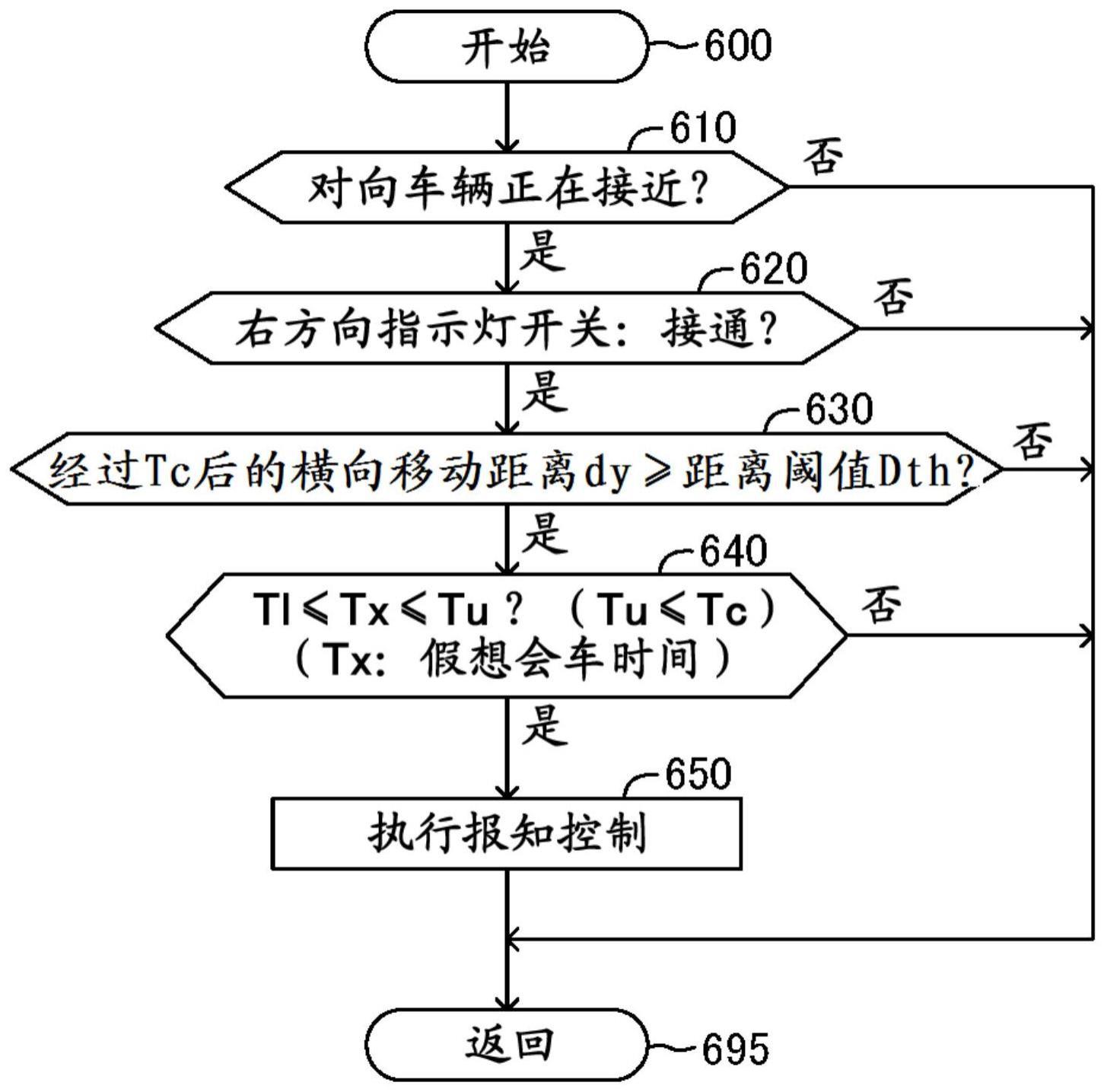
13、基于所述周围信息来判定是否存在如下对向车辆(vop)(步骤610),该对向车辆(vop)是在所述对向车道上向接近所述自身车辆的方向移动的其他车辆,并且是从所述其他车辆沿着所述其他车辆的移动方向延伸的假想延长线(lo)相对于所述自身车辆的当前位置经过特定方向侧的其他车辆,
14、在满足在判定为存在所述对向车辆(步骤610:是)、且判定为所述操作器处于与用于使所述特定方向侧的所述方向指示器工作的操作对应的操作状态时(步骤620:是)成立的前提条件的情况下,
15、基于包括操舵输入值和有无制动操作中的至少一方和车速在内的车辆信息来判定是否满足横穿条件(条件3、条件5、条件6)(步骤630、步骤830、步骤840),所述横穿条件在所述自身车辆经过预定的基准时间(tc、ts)后完成对所述对向车道或所述对向车道合流的交叉路口的横穿的可能性高时成立,
16、当将朝向与所述对向车辆的移动方向相反的方向规定为纵方向时,
17、在满足执行条件的情况下,执行通过使所述报知装置执行报知动作来向所述驾驶员报知所述对向车辆的存在的报知控制,所述执行条件在判定为满足所述横穿条件(步骤630:是,步骤830:是,步骤840:是)、且判定为假想会车时间(tx)为预定的下限时间(tl)以上且为所述基准时间以下的预定的上限时间(tu)以下时(步骤640:是,步骤850:是)成立,所述假想会车时间(tx)是在假定所述自身车辆在所述纵方向上以作为所述车速的所述纵方向上的分量的纵速度(vy)移动并且所述对向车辆维持当前的移动状态而移动的情况下,到所述自身车辆与所述对向车辆在所述纵方向上假想会车所需的时间。
18、在本发明装置中,在前提条件成立的情况下,在横穿条件成立、且假想会车时间为下限时间以上且为上限时间(基准时间以下的时间)以下时,设为执行条件成立,执行报知控制。根据该构成,通过将上限时间设定为适当的值,则“横穿条件成立、且假想会车时间为上限时间以下”意味着“在假定自身车辆一边维持当前的纵速度一边移动并且对向车辆维持当前的移动状态而移动的情况下,自身车辆在对向车道内或交叉路口内与对向车辆发生碰撞”的情况。另外,通过将下限时间设定为适当的值,能够在对向车辆接近到驾驶员能够识别对向车辆的程度的情况下不执行报知控制。因此,根据本发明装置,即使不使用预测轨道也能够适当地判定转弯时的与对向车辆的碰撞可能性,结果,能够兼顾在转弯时在比自动制动控制早的定时执行报知控制和抑制该报知控制的不必要工作。
19、在本发明的一方面,
20、所述驾驶操作状态检测装置是所述操舵输入值检测装置(14),
21、所述车辆信息是包括操舵角(θs)、操舵角速度(ωs)以及所述车速(v)的第1车辆信息,
22、当将与所述纵方向正交且朝向所述特定方向的方向规定为横方向时,
23、所述控制单元(10)构成为,
24、基于所述第1车辆信息来推定假定所述自身车辆(v)移动了所述基准时间所包含的第1基准时间(tc)的情况下的移动距离(d),
25、运算作为所述移动距离在所述横方向上的分量的横向移动距离(dy),
26、在所述横向移动距离为预定的距离阈值(dth)以上的情况下,判定为所述横穿条件(条件3)成立(步骤630:是)。
27、根据该构成,通过将第1基准时间和距离阈值设定为适当的值,能够提高执行条件的精度。换言之,能够抑制报知控制的不必要工作。
28、在该情况下,
29、所述距离阈值(dth)被设定为平均的车道宽度的值。
30、根据该构成,通过将第1基准时间设定为适当的值,能够提高横穿条件成立的情况下的“在自身车辆从当前位置移动了第1基准时间时完成对向车道或交叉路口的横穿的可能性”。结果,能够提高执行条件的精度,能够抑制报知控制的不必要工作。
31、在本发明的一方面,
32、所述驾驶操作状态检测装置是所述制动开关(114),
33、所述车辆信息是包括有无所述制动操作、减速度以及所述车速(v)的第2车辆信息,
34、所述控制单元(10)构成为,
35、基于所述第2车辆信息来推定所述自身车辆(v)停止所需的停止所需时间(t),
36、在所述车速为预定的车速阈值(vth)以上且所述停止所需时间超过所述基准时间所包含的第2基准时间(ts)的情况下,判定为所述横穿条件(条件5、条件6)成立(步骤830:是,步骤840:是)。
37、根据该构成,通过将车速阈值和第2基准时间设定为适当的值,能够提高执行条件的精度。换言之,能够抑制报知控制的不必要工作。
38、在上述说明中,为了帮助理解发明,针对与实施方式对应的发明的构成要件,以写在括号里的方式添加了在实施方式中使用的标号,但发明的各构成要件不限定于由所述标号规定的实施方式。
- 还没有人留言评论。精彩留言会获得点赞!