一种可在火场中工作的全地形球足机器人的制作方法
1.本发明属于机器人,具体涉及一种可在火场中工作的全地形球足机器人。
背景技术:
2.随着城镇化和工业化的发展,高层楼房、工业厂房等建筑数量增长迅速。但是对于高层楼房、工业厂房等建筑的消防问题也逐渐成为威胁建筑安全和人员生命财产安全的隐患。
3.对于楼房中发生火灾时的搜救和探测,目前的设备和方案存在以下几个问题:一是设备介入困难:若建筑发生火灾的位置高度较高,则地面的消防车受到高度限制难以对高层火情进行控制;若失火点在建筑物内部,则建筑物外部的救火设施扑灭火源的困难就会增大;如果采用轮式、履带式或足式等陆行机器人进入火场,由于高层建筑中除楼梯外,还有诸如掉落的建筑材料等其他障碍物,会给陆行机器人的移动带来困难;二是消防人员对火情探测能力不足:若消防人员进入建筑物内救火,需要对建筑物内的火源情况、危险品放置位置情况等进行探测,否则进入建筑物内的消防人员就会存在生命安全威胁。
4.对于厂房发生火灾时的搜救和探测,由于厂房环境复杂,且内部可能存放易燃易爆的危险品,因此消防人员进入火场前如不对厂房内部的火情和危险品放置情况进行探测,会给消防人员的生命安全带来威胁。
5.现有装备对于以上问题的解决,主要是依靠陆行机器人来完成。陆行机器人存在在多障碍地形条件下行进能力不足的问题,而建筑物、厂房中存放的物品繁多,极易形成多障碍环境,限制了陆行机器人的工作能力。
6.综上,针对现有机器人在多障碍、狭小空间下、高温条件下应用能力不足的问题,有必要研制一种越障能力强、具备在狭小空间中自由移动且耐高温的机器人系统。
技术实现要素:
7.本发明的目的是针对现有机器人在多障碍、狭小空间下、高温条件下应用能力不足的问题,提供一种可在火场中工作的全地形球足机器人。
8.本发明所采用的具体技术方案如下:一种可在火场中工作的全地形球足机器人,其中,包括球形轮足,该球形轮足为中空的球形结构,在球形轮足中设置耐高温多轴旋翼子系统。
9.如上所述的一种可在火场中工作的全地形球足机器人,其中,球形轮足包括球形轮足外框,球形轮足外框为圆环形零件,四个球形轮足外框形成球形轮廓,四个球形轮足外框相交点设置连接环,组成球形骨架,球形轮足外框通过运动隔离轴承ⅰ与球形轮足中框连接,并与球形轮足中框之间可进行单自由度转动;球形轮足中框通过运动隔离轴承ⅱ与球形轮足内轴连接,并与球形轮足内轴之间自由转动。
10.如上所述的一种可在火场中工作的全地形球足机器人,其中,耐高温多轴旋翼子系统包含旋翼传动组件、机臂、图像探测器和温度控制舱;旋翼传动组件包含上旋翼、下旋
翼、旋翼安装座、上旋翼传动齿轮、下旋翼传动齿轮和动力输出齿轮;其中上旋翼和下旋翼组成一对共轴双桨系统,安装于旋翼安装座上,上旋翼和下旋翼的桨叶倾角方向相反;上旋翼与上旋翼安装座固连,下旋翼与下旋翼安装座固连,动力输出轴与动力输出齿轮固连,动力输出齿轮分别与上旋翼传动齿轮和下旋翼传动齿轮啮合;当动力输出轴转动时,与其固连的动力输出齿轮带动上旋翼传动齿轮和下旋翼传动齿轮分别以相反方向旋转,上旋翼传动齿轮和下旋翼传动齿轮分别带动上旋翼和下旋翼旋转,进而产生推动机器人运动的拉力;所述旋翼传动组件通过机臂安装在温度控制舱上。
11.如上所述的一种可在火场中工作的全地形球足机器人,其中,图像探测器具备对不同温度的物体成像能力。
12.本发明相对于现有技术具有以下有益效果:1、采用隔热+换热的复合温度控制系统,隔热保证火场环境中的热量不会传递到机器人的关键结构和电子部件上;换热保证机器人内部如电机等工作时发热的部件在工作时产生的热量能够被吸收,使其温度不会因为热量无法散失而过高。
13.2、采用锥齿轮式的旋翼传动机构,通过动力输出轴驱动两个旋翼旋转,保证多轴旋翼的电机可以集中布置在温度控制舱中,避免了多个电机分步式布置时带来复杂的隔热、换热系统,使温度控制系统更加简单。
14.3、采用具有运动隔离功能的球形轮足与多轴旋翼系统结合的方案,使得机器人系统具备陆地行进和空中飞行两种行进模式,对复杂地形的适应能力更强。
附图说明
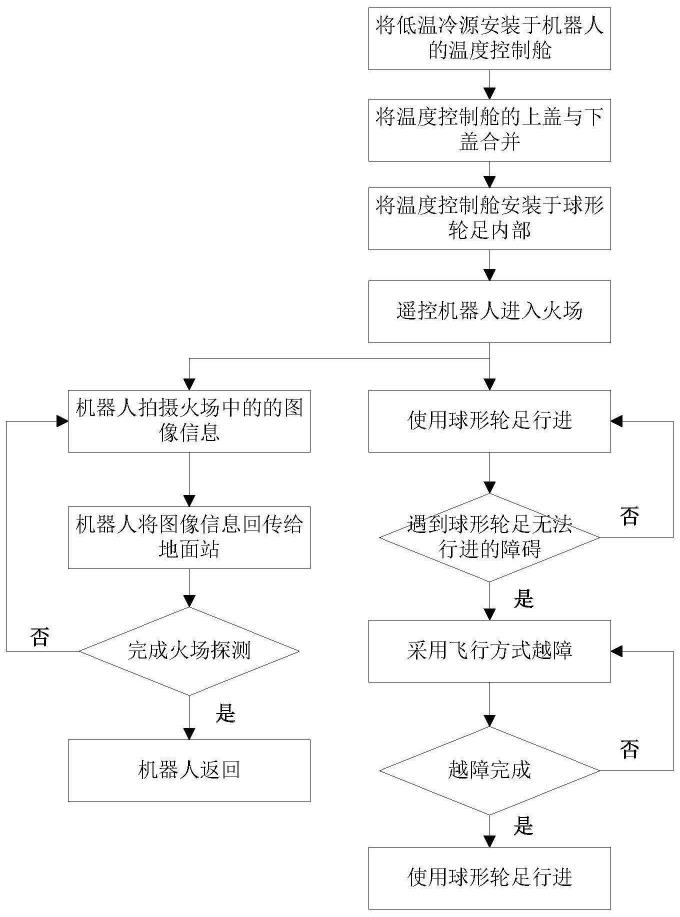
15.图1为本发明的工作流程图;
16.图2(a)为本发明俯视图,(b)为本发明正视图,(c)为本发明的斜视图;
17.图3为本发明爆炸视图;
18.图4为本发明中球形轮足的结构示意图;
19.图5为本发明中耐高温多轴旋翼子系统的结构示意图;
20.图6为本发明中耐高温多轴旋翼子系统的爆炸视图;
21.图7为本发明中共轴双桨传动结构示意图;
22.图8为本发明中电气模块示意图;
23.图9(a)为本发明中去掉换热壳的电气模块结构示意图,(b)为本发明中去掉换热壳的电气模块俯视图;
24.其中,1-球形轮足,2-耐高温多轴旋翼子系统,3-球形轮足外框,4-连接环,5-球形轮足中框,6-运动隔离轴承ⅰ,7-球形轮足内轴,8-运动隔离轴承ⅱ,9-上旋翼,10-下旋翼,11-旋翼安装座,12-动力输出轴,13-机臂,14-图像探测器,15-温度控制舱,16-动力输出齿轮,17-上旋翼传动齿轮,18-下旋翼传动齿轮,19-温度控制舱上盖,20-温度控制舱下盖,21-单向泄压阀,22-上隔热填充层,23-下隔热填充层,24-电气模块,25-换热壳,26-低温冷源,27-无线通讯天线,28-电机隔热套管,29-机架,30-运动控制舱,31-电机,32-电机安装座。
具体实施方式
25.本发明所述的可在火场中工作的全地形球足机器人采用多轴旋翼系统作为动力来源,通过调整各轴上旋翼的转速来实现机器人前进、后退、转向、上升和下降动作。同时,多轴旋翼子系统外侧由具备运动隔离功能的球形轮足包裹。多轴旋翼子系统和球形轮足使得本发明既可像无人机一样离开地面飞行,又具备在地面和墙壁上滚动前进的能力,实现空中和陆地的两栖运动。
26.同时,为了保证本发明所述球足机器人在火场环境中可靠工作,本发明采用隔热+换热的复合温度控制系统,保证机器人上的电子电路、伺服系统、有效载荷等部件的工作环境温度在其可适应的温度范围之内。其中隔热系统采用隔热材料包裹于多轴旋翼子系统除旋翼之外的部分,形成封闭热隔绝层,减弱火场环境中的高温热能传递给机器人内部。换热系统在机器人内部,采用低温冷源作为热交换的低温部分,通过导热管与在工作中发热的电机、电子调速器、电池、电路元件等部件进行热交换,降低电机、电子调速器等部件的温度,防止其过热使其无法正常工作。
27.本发明采取的技术方案如下:
28.本发明由耐高温多轴旋翼子系统和球形轮足组成。
29.其中球形轮足由球形轮足外框、连接环、球形轮足中框、球形轮足内轴和若干运动隔离轴承组成。其中,若干球形轮足外框通过连接环互相连接,组成球形骨架;球形轮足外框通过运动隔离轴承与球形轮足中框连接,并与球形轮足中框之间可进行单自由度转动;球形轮足中框通过运动隔离轴承与球形轮足内轴连接,并与球形轮足内轴之间自由转动,使得耐高温多轴旋翼子系统的姿态运动不受球形轮足姿态运动的影响。
30.所述耐高温多轴旋翼子系统包含旋翼传动组件、机臂、图像探测器和温度控制舱。所述旋翼传动组件包含上旋翼、下旋翼、旋翼安装座、上旋翼传动齿轮、下旋翼传动齿轮和动力输出齿轮。其中上旋翼和下旋翼组成一对共轴双桨系统,安装于旋翼安装座上,上旋翼和下旋翼的桨叶倾角方向相反,以保证工作时两个旋翼的旋转方向相反,但是产生的拉力方向相同。上旋翼与上旋翼安装座固连,下旋翼与下旋翼安装座固连,动力输出轴与动力输出齿轮固连,动力输出齿轮分别与上旋翼传动齿轮和下旋翼传动齿轮啮合。当动力输出轴转动时,与其固连的动力输出齿轮带动上旋翼传动齿轮和下旋翼传动齿轮分别以相反方向旋转,上旋翼传动齿轮和下旋翼传动齿轮分别带动上旋翼和下旋翼旋转,进而产生推动机器人运动的拉力。所述旋翼传动组件通过机臂安装在温度控制舱上。
31.图像探测器具备对不同温度的物体成像能力,使得机器人能够探测不同温度的燃烧物,用于判别火源等关键信息。
32.温度控制舱由外层防火隔热腔体、中层隔热腔体和内部的电气模块组成。外层防火隔热腔体由温度控制舱上盖和温度控制舱下盖组成,温度控制舱上盖和温度控制舱下盖为两个半封闭腔体,一端封闭,一端开口,采用耐高温、防火材料制成,两者的开口端面扣合后可形成封闭的腔体,用于进行初步隔热;单向泄压阀安装于温度控制舱上盖的封闭端面上,保证外部高温气体无法进入温度控制舱,同时可以使温度控制舱中的低温冷源在内部热交换过程中产生的气体泄出,保证温度控制舱内部的压力稳定。中层隔热腔体由上隔热填充层和下隔热填充层组成,上隔热填充层和下隔热填充层均由隔热材料制成,形状均为一端封闭,一端开口的半封闭腔体,其中上隔热填充层封闭端面开有小孔,用于单向泄压阀
通过;中层隔热腔体起到主隔热作用,与外层防火隔热腔体一起将火场环境中的热量与电气模块隔绝,将环境温度对电气模块中各部件的影响降到最低。
33.所述电气模块包含换热壳、低温冷源、无线通讯天线、电机隔热套管、机架、运动控制舱、电机和电机安装座。其中机架为板状结构,用于安装低温冷源、运动控制舱和电机安装座。电机安装座安装于机架上,用于安装电机。电机固定于各个电机安装座上,通过电机隔热套管与各个动力输出轴连接,电机转动驱动动力输出轴转动,进而驱动旋翼旋转产生动力。
34.所述低温冷源安装于机架上,与电机间隔布置。换热壳包裹于低温冷源和电机上,其结构为多页面结构,便于吸收电机在工作过程中发热并传导给低温冷源。电机工作时会产生热量,由于电气模块外由外层防火隔热腔体和中层隔热腔体包裹,其热量无法散出,因此可通过换热壳与低温冷源进行热交换,降低电机工作时的温度;其他工作时发热不严重的电子部件,其工作时散发的热量不直接通过换热壳与低温冷源进行热交换,而是先散发到中层隔热腔体内,再通过换热壳被低温冷源吸收,降低其工作温度。
35.无线通讯天线用于将机器人探测的图像信息传输给地面站。运动控制舱包含惯性测量元件、飞行控制计算机、电源及其它电路硬件,其中惯性测量元件用于测量机器人在运动过程中的加速度和角速率,并传输给飞控计算机;飞控计算机可接收惯性测量元件输出的机器人运动信息,并可通过无线通讯天线27接收地面站发出的控制指令,并根据控制指令和机器人运动信息计算电机和舵机控制指令,控制旋翼转速和朝向;电源为机器人的电机31、运动控制舱30中惯性测量元件、飞行控制计算机等部件提供电能。
36.本发明的工作流程如下:
37.步骤一:在火场附近将低温冷源安装于机器人的温度控制舱中,将温度控制舱上盖与下盖合并,将机器人的温度控制舱安装于球形轮足中;
38.步骤二:施放机器人,并通过无线数据链遥控机器人进入火场;
39.步骤三:当机器人在行进过程中地面较为平坦或障碍物坡度不大时,依靠球形轮足进行滚动前进,由多轴旋翼系统提供前进动力;
40.步骤四:当机器人在行进过程中遇到的障碍较高、坡度较大时,依靠多轴旋翼子系统产生升力飞跃障碍物;
41.步骤五:器人在运动过程中,地面站通过无线数据链向机器人发送运动控制指令,机器人依靠携带的拍摄设备探测火场内部环境,并将图像信息通过无线数据链回传给地面站;
42.步骤六:完成对火场环境勘察后,机器人返回。
43.下面结合给出具体的实例。
44.本实施例提供了一种可在火场中工作的全地形球足机器人,如图2所示,本实施例中,全地形足机器人包含球形轮足1和耐高温多轴旋翼子系统2(如图3所示),其中耐高温多轴旋翼子系统2采用四轴旋翼方案。
45.其中球形轮足1(如图4所示)由球形轮足外框3、连接环4、球形轮足中框5、运动隔离轴承ⅰ6、球形轮足内轴7、运动隔离轴承ⅱ8组成。其中,若干球形轮足外框3通过连接环4互相连接,组成球形骨架;球形轮足外框3通过运动隔离轴承ⅰ6与球形轮足中框5连接,并与球形轮足中框5之间可进行单自由度转动;球形轮足中框5通过运动隔离轴承ⅱ8与球形轮
足内轴7连接,并与球形轮足内轴7之间自由转动,使得耐高温多轴旋翼子系统2的姿态运动不受球形轮足姿态运动的影响。
46.如图5所示,所述耐高温多轴旋翼子系统2包含上旋翼9、下旋翼10、旋翼安装座11、动力输出轴12、机臂13、图像探测器14和温度控制舱15。
47.所述上旋翼9和下旋翼10组成一对共轴双桨系统,安装于旋翼安装座11上,通过动力输出轴12驱动旋转;上旋翼9和下旋翼10的桨叶倾角方向相反,以保证工作时两个旋翼的旋转方向相反,但是产生的拉力方向相同。动力输出轴12与上旋翼9和下旋翼10之间的传动关系如图7所示,上旋翼9与上旋翼传动齿轮17固连,下旋翼10与下旋翼传动齿轮18固连,动力输出轴12与动力输出齿轮16固连,动力输出齿轮12分别与上旋翼传动齿轮17和下旋翼传动齿轮18啮合。动力输出轴12由温度控制舱15中的电机31驱动转动,当动力输出轴12转动时,与其固连的动力输出齿轮12带动上旋翼传动齿轮17和下旋翼传动齿轮18分别以相反方向旋转,上旋翼传动齿轮17和下旋翼传动齿轮18分别带动上旋翼9和下旋翼10旋转,进而产生推动机器人运动的拉力。上旋翼9、下旋翼10、旋翼安装座11、动力输出轴12各四组,分别通过四个机臂13安装在温度控制舱15的机架29上。
48.本实施例中,图像探测器14采用白光+红外双模摄像机,使得机器人能够探测不同温度的燃烧物,用于判别火源等关键信息。
49.温度控制舱15由温度控制舱上盖19、温度控制舱下盖20、单向泄压阀21、上隔热填充层22、下隔热填充层23和电气模块24。温度控制舱上盖19和温度控制舱下盖20为两个半封闭腔体,一端封闭,一端开口,采用耐高温、防火材料制成,两者的开口端面扣合后可形成封闭的腔体,用于进行初步隔热;上隔热填充层22、下隔热填充层23和电气模块24置于该封闭腔体中;单向泄压阀21安装于温度控制舱上盖19的封闭端面上,保证外部高温气体无法进入由温度控制舱上盖19和温度控制舱下盖20组成的封闭腔体中,同时可以使封闭腔体中的低温冷源26在内部热交换过程中产生的气体泄出,保证温度控制舱15内部的压力稳定。
50.上隔热填充层22和下隔热填充层23均由隔热材料制成,形状均为一端封闭,一端开口的半封闭腔体,其中上隔热填充层封闭端面开有小孔,用于单向泄压阀21通过;上隔热填充层22安装于温度控制舱上盖19内部,下隔热填充层23安装于温度控制舱下盖20内部,上隔热填充层22和下隔热填充层23共同组成一个密闭腔体,将电气模块24包裹于其中,起到主隔热作用,与温度控制舱上盖19和温度控制舱下盖20一起将火场环境中的热量与电气模块24隔绝,将环境温度对电气模块24中各部件的影响降到最低。
51.如图8和图9所示,所述电气模块24包含换热壳25、低温冷源26、无线通讯天线27、电机隔热套管28、机架29、运动控制舱30、电机31和电机安装座32。其中机架29为板状结构,用于安装低温冷源26、运动控制舱30和电机安装座32。电机安装座32共4组,安装于机架29上,用于安装电机31。电机31在本实施例中共4组,固定于各个电机安装座32上,通过电机隔热套管28与各个动力输出轴12连接,电机31转动驱动动力输出轴12转动,进而驱动旋翼旋转产生动力。
52.低温冷源26在本实施例中共4组,采用固体二氧化碳材料,安装于机架29上,与4组电机31间隔布置。换热壳25包裹于低温冷源26和电机31上,其结构为多页面结构,便于吸收电机31在工作过程中发热并传导给低温冷源26。电机31工作时会产生热量,由于电气模块24外包裹了由上隔热填充层22与下隔热填充层23组成的密闭隔热腔体以及由温度控制舱
上盖19与温度控制舱下盖20组成的密闭隔热腔体,其热量无法散出,因此可通过换热壳25与低温冷源26进行热交换,降低电机31工作时的温度;其他工作时发热不严重的电子部件,其工作时散发的热量不直接通过换热壳25与低温冷源26进行热交换,而是先散发到上隔热填充层22与下隔热填充层23组成的密闭隔热腔体内,再通过换热壳25被低温冷源26吸收,降低其工作温度。
53.无线通讯天线27用于将机器人探测的图像信息传输给地面站。运动控制舱30包含惯性测量元件、飞行控制计算机、电源及必要的电路硬件,其中惯性测量元件用于测量机器人在运动过程中的加速度和角速率,并传输给飞控计算机;飞控计算机可接收惯性测量元件输出的机器人运动信息,并可通过无线通讯天线27接收地面站发出的控制指令,并根据控制指令和机器人运动信息计算电机和舵机控制指令,控制旋翼转速和朝向;电源为机器人的电机31、运动控制舱30中惯性测量元件、飞行控制计算机等部件提供电能。
54.本实施例的整体工作过程如下:
55.如图1所示,操作人员在抵达火场附近后,将低温冷源26安装于机器人的温度控制舱15中,将温度控制舱上盖19与温度控制舱下盖20合并,将机器人的温度控制舱15安装于球形轮足1中;机器人组装完成后,施放机器人,并通过无线数据链遥控机器人进入火场;当机器人在行进过程中地面较为平坦或障碍物坡度不大时,依靠球形轮足1进行滚动前进,由耐高温多轴旋翼子系统2提供前进动力;当机器人在行进过程中遇到的障碍较高、坡度较大时,依靠耐高温多轴旋翼子系统2产生升力飞跃障碍物;器人在运动过程中,地面站通过无线数据链向机器人发送运动控制指令,机器人依靠无线通讯天线27接收地面站发送的控制指令,并根据控制指令运动;机器人依靠携带的图像探测器14探测火场内部环境,并将图像信息通过无线通讯天线27回传给地面站;在完成对火场环境勘察后,机器人返回。
56.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1