一种结合倾转四旋翼与双轮足的陆空两栖机器人
1.本发明涉及陆空两栖机器人技术领域,具体涉及一种结合倾转四旋翼与双轮足的陆空两栖机器人。
背景技术:
2.目前的陆空两栖机器人多以旋翼结合轮式移动的方式为主,实现了独立飞行与独立行走的功能,其模式切换主要采用人力控制或指令控制的方式,当然也有不少学者将多旋翼平台与足式、履带式等多种爬行机构进行融合实现了新的功能,主要包括飞行、行走功能的提升与平稳着陆等。基于上述现状可知,两栖平台未来的发展方向主要有以下几点:
3.首先从爬行机构的形式来讲,轮式、足式和履带式作为传统的地面移动模式均开展了与旋翼平台结合的相关研究,复合移动模式结合了单一移动模式的优点,极大地提升了平台的地面移动能力,但与旋翼平台结合的研究极少。将轮腿式复合移动爬行机构与飞行平台结合一方面可以使爬行机构具备足式的地面适应性,同时具备轮式的快速移动能力,并且摆脱飞行平台的辅助,实现独立行走,提升机器人的续航能力。
4.其次从飞行平台的角度来看,现有的陆空两栖机器人的爬行机构不具备收展功能,在飞行模式下,爬行机构会破坏整体机器人的完整性及机器人整体的气动特性。
5.最后从平台间的协同作用来讲,如何实现飞行动力与地面移动动力间的协同作用,提升机器人的性能或续航能力,尽量避免平台互为负载的情况,提升驱动单元的能量利用率也是两栖平台发展的重要方向。
6.综上,现有的陆空两栖机器人采用单一移动模式与飞行平台结合,存在爬行机构的功能单一,且需要借助飞行平台实现行走,进而降低了机器人的续航能力的问题。
技术实现要素:
7.本发明的目的是为了解决现有的陆空两栖机器人采用单一移动模式与飞行平台结合,存在爬行机构的功能单一,且需要借助飞行平台实现行走,进而降低了机器人的续航能力的问题,进而提供一种结合倾转四旋翼与双轮足的陆空两栖机器人。
8.本发明的技术方案是:
9.一种结合倾转四旋翼与双轮足的陆空两栖机器人,它包括飞行平台和地面移动平台,飞行平台为可倾转四旋翼机构,可倾转四旋翼机构包括机身4和四个旋翼组件,每个旋翼组件包括螺旋桨1、旋翼驱动电机2和倾转舵机3,机身4包括中上部连接柱17、两个纵向安装侧板18、两个中下部连接柱19和两个舵机驱动转轴20,两个纵向安装侧板18竖直相对设置在飞行平台的左右两侧,两个纵向安装侧板18内侧壁的中下部通过水平并排设置的两个中下部连接柱19固定连接,两个纵向安装侧板18内侧壁的中上部通过水平设置的中上部连接柱17固定连接,两个舵机驱动转轴20分别水平设置在飞行平台的前后两侧并与两个纵向安装侧板18转动连接,每个舵机驱动转轴20的两端分别设有两个倾转舵机3,倾转舵机3安装在纵向安装侧板18的内侧壁上,倾转舵机3的摇臂与舵机驱动转轴20连接,每个舵机驱动
转轴20两端伸出两个纵向安装侧板18的部分分别安装有两个旋翼驱动电机2,每个旋翼驱动电机2的电机轴上均安装有一个螺旋桨1,每个舵机驱动转轴20在与其连接的两个倾转舵机3的驱动下实现转动,进而带动舵机驱动转轴20两端的螺旋桨1和旋翼驱动电机2实现倾转,地面移动平台为两轮腿式自平衡爬行机构,两轮腿式自平衡爬行机构的两个腿部组件分别对称安装在两个纵向安装侧板18的外侧壁上。
10.进一步地,纵向安装侧板18倒置的等边三角形板状结构,纵向安装侧板18上端中部加工有向下凹的v型槽。
11.进一步地,每个纵向安装侧板18前后两端的上部分别加工有两个转轴装配孔,两个纵向安装侧板18上的四个转轴装配孔两两相对设置,前侧舵机驱动转轴20的两端分别通过两个轴承与两个纵向安装侧板18前端的两个转轴装配孔转动连接,后侧舵机驱动转轴20的两端分别通过两个轴承与两个纵向安装侧板18后端的两个转轴装配孔转动连接。
12.进一步地,每个腿部组件包括小腿连杆a5、小腿连杆b6、小腿连杆c7、小腿连杆d8、小腿驱动电机9、大腿驱动电机10、大腿杆11、小腿杆12和轮部组件,每个纵向安装侧板18内侧端面上分别安装有电机轴平行布置的小腿驱动电机9和大腿驱动电机10,小腿驱动电机9位于大腿驱动电机10斜上方,纵向安装侧板18上加工有两个电机轴装配孔,小腿驱动电机9和大腿驱动电机10的电机轴分别穿过纵向安装侧板18的两个电机轴装配孔并延伸至纵向安装侧板18外侧,小腿连杆a5一端与小腿驱动电机9的电机轴固定连接,小腿连杆c7一端通过轴承与大腿驱动电机10的电机轴同轴转动连接,小腿连杆b6两端分别通过销轴与小腿连杆a5和小腿连杆c7另一端转动连接,大腿杆11顶端与大腿驱动电机10的电机轴固定连接,大腿杆11底端通过销轴与小腿杆12顶端转动连接,小腿杆12底端安装有轮部组件,小腿连杆d8一端通过销轴与小腿杆12中上部转动连接,小腿连杆d8另一端通过销轴与小腿连杆c7另一端转动连接。
13.进一步地,腿部组件采用双四连杆式结构,小腿连杆a5、小腿连杆b6、小腿连杆c7和纵向安装侧板18构成了第一四连杆机构,第一四连杆机构为平行四连杆机构,小腿连杆c7、小腿连杆d8、小腿杆12和大腿杆11构成了第二四连杆机构。
14.进一步地,轮部组件包括轮部驱动电机14、轮毂15和轮胎16,小腿杆12底端安装有轮部驱动电机14,轮部驱动电机14的电机轴上安装有轮毂15,轮胎16安装在轮毂15上。
15.进一步地,每个腿部组件还包括被动轮13,小腿杆12上部远离大腿杆11一侧的端面上设有被动轮安装架,被动轮13安装在被动轮安装架上。
16.进一步地,机身4还包括控制器21,控制器21通过连接件固定安装在两个中下部连接柱19上,控制器21通过多个导线分别与两个小腿驱动电机9、两个大腿驱动电机10、两个轮部驱动电机14、四个旋翼驱动电机2和四个倾转舵机3连接。
17.进一步地,机身4还包括蓄电池22,蓄电池22设置在控制器21下方,蓄电池22顶端通过连接件与控制器21可拆卸连接,蓄电池22通过多个导线分别控制器21、两个小腿驱动电机9、两个大腿驱动电机10、两个轮部驱动电机14、四个旋翼驱动电机2和四个倾转舵机3连接。
18.进一步地,机身4还包括横向安装底板23和两个滑道24,横向安装底板23水平安装在控制器21底端,横向安装底板23下端面沿飞行平台长度方向水平并排安装有两个滑道24,滑道24内侧端面沿水平方向开设有滑槽,蓄电池22顶端两侧沿水平方向分别向外延伸
有板状外沿,蓄电池22两侧板状外沿分别与横向安装底板23底部的两个滑道24可滑动连接。
19.本发明与现有技术相比具有以下效果:
20.1、本发明将轮腿式复合移动爬行机构与飞行平台结合一方面可以使爬行机构具备足式的地面适应性,同时具备轮式的快速移动能力,并且摆脱飞行平台的辅助,实现独立行走,提升机器人的续航能力。在飞行方面,本发明的陆空两栖机器人具备四旋翼飞行方式,采用可倾转旋翼的飞行控制技术实现了机器人垂直起降、垂起转平飞等功能;腿部结构具有两个自由度,可以在回收腿部的过程中调整机器人整体的质心位置,保证机器人具有较好的飞行性能。
21.2、本发明的地面移动平台采用两轮腿复合移动模式,质量更轻并且运动更加灵活,更适合与负载能力有限的旋翼平台结合。通过轮部的自平衡控制算法实现了独立移动功能,通过腿部的控制算法使机器人可以穿过、跨过甚至是跃过障碍物,还可以在不平坦的路面上保证机身水平和稳定性,可以适应大部分地形。在膝关节处设置被动轮使机器人具备了四轮地面移动模式,在牺牲高度调整能力的情况下获得了极大的负载能力和稳定性。
22.3、由于本发明的两轮腿式自平衡爬行机构采用串级控制算法进行控制,与旋翼飞行器的控制算法相似,因此可以将旋翼动力与爬行机构的驱动单元协同控制,二者的控制目标相同,协同作用下可以提升机器人的稳定性能和负载能力,同时还可以使机器人实现单腿移动,任意姿态稳定等效果,可以适应更复杂的应用场景。
23.4、本发明的爬行机构的腿部采用双四连杆式结构,具有两个自由度。大腿杆11由大腿驱动电机10直接驱动,小腿杆12由小腿驱动电机9间接驱动,通过两个四连杆机构传动,一方面相比于二连杆式的腿部结构,膝关节输出力矩可以减小一半;同时可以将驱动单元集成在机身处,降低了腿部结构的转动惯量,提升了机器人的控制性能。
附图说明
24.图1是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人的主视图;
25.图2是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人的侧视图;
26.图3是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人的俯视图;
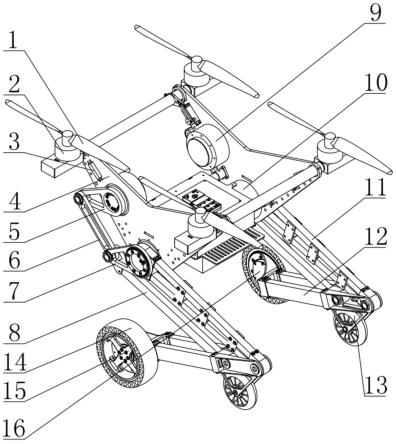
27.图4是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人的轴测图;
28.图5是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在飞行状态下的主视图;
29.图6是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在飞行状态下的侧视图;
30.图7是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在飞行状态下的俯视图;
31.图8是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在飞行状态下的轴测图;
32.图9是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在跳跃障碍状态下的结构示意图;
33.图10是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在钻过障碍状态下
的结构示意图;
34.图11是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在地面适应状态下的结构示意图;
35.图12是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在单轮行驶状态下的结构示意图;
36.图13是本发明的结合倾转四旋翼与双轮足的陆空两栖机器人在防摔倒状态下的结构示意图。
37.图中:1-螺旋桨;2-旋翼驱动电机;3-倾转舵机;4-机身;5-小腿连杆1;6-小腿连杆2;7-小腿连杆3;8-小腿连杆4;9-小腿驱动电机;10-大腿驱动电机;11-大腿杆;12-小腿杆;13-被动轮;14-轮部驱动电机;15-轮毂;16-轮胎;17-中上部连接柱、18-纵向安装侧板、19-中部连接柱;20-舵机驱动转轴;21-控制器;22-蓄电池;横向安装底板23;滑道24。
具体实施方式
38.具体实施方式一:结合图1至图13说明本实施方式,本实施方式的一种结合倾转四旋翼与双轮足的陆空两栖机器人,它包括飞行平台和地面移动平台,飞行平台为可倾转四旋翼机构,可倾转四旋翼机构包括机身4和四个旋翼组件,每个旋翼组件包括螺旋桨1、旋翼驱动电机2和倾转舵机3,机身4包括中上部连接柱17、两个纵向安装侧板18、两个中下部连接柱19和两个舵机驱动转轴20,两个纵向安装侧板18竖直相对设置在飞行平台的左右两侧,两个纵向安装侧板18内侧壁的中下部通过水平并排设置的两个中下部连接柱19固定连接,两个纵向安装侧板18内侧壁的中上部通过水平设置的中上部连接柱17固定连接,两个舵机驱动转轴20分别水平设置在飞行平台的前后两侧并与两个纵向安装侧板18转动连接,每个舵机驱动转轴20的两端分别设有两个倾转舵机3,倾转舵机3安装在纵向安装侧板18的内侧壁上,倾转舵机3的摇臂与舵机驱动转轴20连接,每个舵机驱动转轴20两端伸出两个纵向安装侧板18的部分分别安装有两个旋翼驱动电机2,每个旋翼驱动电机2的电机轴上均安装有一个螺旋桨1,每个舵机驱动转轴20在与其连接的两个倾转舵机3的驱动下实现转动,进而带动舵机驱动转轴20两端的螺旋桨1和旋翼驱动电机2实现倾转,地面移动平台为两轮腿式自平衡爬行机构,两轮腿式自平衡爬行机构的两个腿部组件分别对称安装在两个纵向安装侧板18的外侧壁上。
39.本实施方式中,飞行平台采用具有两个倾转自由度的四旋翼飞行模式,可以实现垂直起降、垂起转平飞等功能;地面移动平台采用两轮腿移动模式,首先该模式可以实现基本的地面行走、跳跃以及适应复杂路面的功能;其次相比于多轮腿移动模式,两轮腿具有质量更轻且更加灵活的特点,更适合与旋翼飞行平台结合。同时爬行机构还具备四轮移动模式,提升了稳定性和极限负载能力,并且可以与两轮自平衡模式自由切换;最后由于腿部具有两个自由度,可以在矢状面内任意运动,在飞行过程中可以通过调整腿部的姿态使机器人整体质心在中心位置,提升机器人的整体飞行性能。另外由于两轮腿式自平衡爬行机构的控制原理与旋翼平台相似,在地面移动过程中可以利用旋翼动力辅助地面移动平台以提升其极限负载能力和稳定能力。
40.本实施方式中,飞行平台采用可倾转四旋翼的飞行方式,每个旋翼均具备独立的驱动电机和倾转舵机,倾转角度可以达到
±
60
°
,利用现有的四旋翼控制技术可以实现机器
人的垂直起降、垂起转平飞等功能。
41.本实施方式中,腿部采用位置控制加前馈力矩补偿的控制方式,可以实现高度调整和地面适应等功能,高度调整使机器人可以跨越、穿过或跃过障碍物,地面适应可以使机器人在两腿着地高度不同的情况下尽可能保证机身的水平,提升机器人的稳定性。另外,飞行平台可以在地面移动过程中为机器人提供额外的支持力和稳定保证,当机器人失稳时可以通过飞行动力保持机身稳定;当行驶的路面较窄时,可以采用单轮行进的方式通过。
42.本实施方式中,倾转舵机3采用x20-8.4-50舵机,工作参数如下:
43.工作电压:dc6.0v-8.4v
44.尺寸:40.50*21*42mm
45.扭力:45kg.cm@8.4v 42kg.cm@7.4v 38kg.cm@6.0v
46.速度:0.15sec/60
°
@8.4v 0.17sec/60
°
@7.4v
47.0.20sec/60
°
@6.0v
48.重量:78g
49.工作频率:1520us/333hz,900us-2100us
50.马达:φ20mm coreless
51.ball bearing:2bb
52.采用空心杯电机,全金属cnc外壳。
53.具体实施方式二:结合图1至图4说明本实施方式,本实施方式的纵向安装侧板18倒置的等边三角形板状结构,纵向安装侧板18上端中部加工有向下凹的v型槽。如此设置,倒置的等边三角形板状结构的两底角处同于安装旋翼组件,通过在纵向安装侧板18上端加工v型槽来减轻机器人的质量。其它组成和连接关系与具体实施方式一相同。
54.具体实施方式三:结合图1至图4说明本实施方式,本实施方式的每个纵向安装侧板18前后两端的上部分别加工有两个转轴装配孔,两个纵向安装侧板18上的四个转轴装配孔两两相对设置,前侧舵机驱动转轴20的两端分别通过两个轴承与两个纵向安装侧板18前端的两个转轴装配孔转动连接,后侧舵机驱动转轴20的两端分别通过两个轴承与两个纵向安装侧板18后端的两个转轴装配孔转动连接。如此设置,舵机驱动转轴20与纵向安装侧板18之间通过轴承可转动连接,每个舵机驱动转轴20在与其连接的两个倾转舵机3的驱动下实现转动,进而带动舵机驱动转轴20两端的螺旋桨1和旋翼驱动电机2实现倾转。其它组成和连接关系与具体实施方式一或二相同。
55.具体实施方式四:结合图1和图4说明本实施方式,本实施方式的每个腿部组件包括小腿连杆a5、小腿连杆b6、小腿连杆c7、小腿连杆d8、小腿驱动电机9、大腿驱动电机10、大腿杆11、小腿杆12和轮部组件,每个纵向安装侧板18内侧端面上分别安装有电机轴平行布置的小腿驱动电机9和大腿驱动电机10,小腿驱动电机9位于大腿驱动电机10斜上方,纵向安装侧板18上加工有两个电机轴装配孔,小腿驱动电机9和大腿驱动电机10的电机轴分别穿过纵向安装侧板18的两个电机轴装配孔并延伸至纵向安装侧板18外侧,小腿连杆a5一端与小腿驱动电机9的电机轴固定连接,小腿连杆c7一端通过轴承与大腿驱动电机10的电机轴同轴转动连接,小腿连杆b6两端分别通过销轴与小腿连杆a5和小腿连杆c7另一端转动连接,大腿杆11顶端与大腿驱动电机10的电机轴固定连接,大腿杆11底端通过销轴与小腿杆12顶端转动连接,小腿杆12底端安装有轮部组件,小腿连杆d8一端通过销轴与小腿杆12中
上部转动连接,小腿连杆d8另一端通过销轴与小腿连杆c7另一端转动连接。如此设置,由于腿部结构具有两个自由度,因此可以通过调整腿部的姿态改变机器人的整体质心位置,提升机器人的控制性能。地面移动机构选用双轮足复合移动模式,兼具了足式移动的地面适应性和轮式移动的高速高效性。其它组成和连接关系与具体实施方式一、二或三相同。
56.具体实施方式五:结合图1和图4说明本实施方式,本实施方式的腿部组件采用双四连杆式结构,小腿连杆a5、小腿连杆b6、小腿连杆c7和纵向安装侧板18构成了第一四连杆机构,第一四连杆机构为平行四连杆机构,小腿连杆c7、小腿连杆d8、小腿杆12和大腿杆11构成了第二四连杆机构。如此设置,通过小腿驱动电机9驱动小腿连杆c7可以实现对小腿杆12的驱动,相比于二连杆式结构,该双四连杆式结构可以将膝关节的驱动力矩降低一半。其它组成和连接关系与具体实施方式一、二、三或四相同。
57.本实施方式中,双足结构在提升了机器人地面移动灵活性的同时,尽可能降低了机器人的本体质量。腿部采用双四连杆式结构,一方面相比于二连杆式的腿部结构可以将膝关节输出力矩降低一半;另一方面可以将驱动单元集中在机身处,降低腿部的转动惯量,提升腿部的控制性能。
58.具体实施方式六:结合图1和图4说明本实施方式,本实施方式的轮部组件包括轮部驱动电机14、轮毂15和轮胎16,小腿杆12底端安装有轮部驱动电机14,轮部驱动电机14的电机轴上安装有轮毂15,轮胎16安装在轮毂15上。如此设置,将轮部驱动电机14固定在小腿杆12上,通过轮毂15与轮胎16连接构成爬行机构的轮部。其它组成和连接关系与具体实施方式一、二、三、四或五相同。
59.具体实施方式七:结合图1、图2和图4说明本实施方式,本实施方式的每个腿部组件还包括被动轮13,小腿杆12上部远离大腿杆11一侧的端面上设有被动轮安装架,被动轮13安装在被动轮安装架上。如此设置,在膝关节处设置被动轮使机器人具备了四轮地面移动模式,在牺牲高度调整能力的情况下获得了极大的负载能力和稳定性。其它组成和连接关系与具体实施方式一、二、三、四、五或六相同。
60.具体实施方式八:结合图2至图4说明本实施方式,本实施方式的机身4还包括控制器21,控制器21通过连接件固定安装在两个中下部连接柱19上,控制器21通过多个导线分别与两个小腿驱动电机9、两个大腿驱动电机10、两个轮部驱动电机14、四个旋翼驱动电机2和四个倾转舵机3连接。其它组成和连接关系与具体实施方式一、二、三、四、五、六或七相同。
61.本实施方式中,控制器21控制两个倾转舵机3同步驱动舵机驱动转轴20转动,进而使得每个舵机驱动转轴20在与其连接的两个倾转舵机3的驱动下实现转动,进而带动舵机驱动转轴20两端的螺旋桨1和旋翼驱动电机2实现倾转。
62.具体实施方式九:结合图2至图4说明本实施方式,本实施方式的机身4还包括蓄电池22,蓄电池22设置在控制器21下方,蓄电池22顶端通过连接件与控制器21可拆卸连接,蓄电池22通过多个导线分别控制器21、两个小腿驱动电机9、两个大腿驱动电机10、两个轮部驱动电机14、四个旋翼驱动电机2和四个倾转舵机3连接。如此设置,蓄电池22为机器人提供电源。其它组成和连接关系与具体实施方式一、二、三、四、五、六、七或八相同。
63.具体实施方式十:结合图2和图4说明本实施方式,本实施方式的机身4还包括横向安装底板23和两个滑道24,横向安装底板23水平安装在控制器21底端,横向安装底板23下
端面沿飞行平台长度方向水平并排安装有两个滑道24,滑道24内侧端面沿水平方向开设有滑槽,蓄电池22顶端两侧沿水平方向分别向外延伸有板状外沿,蓄电池22两侧板状外沿分别与横向安装底板23底部的两个滑道24可滑动连接。如此设置,便于实现蓄电池22的更换和拆装。其它组成和连接关系与具体实施方式的一、二、三、四、五、六、七、八或九相同。
64.工作原理
65.结合图1至图13说明本发明的结合倾转四旋翼与双轮足的陆空两栖机器人的工作原理:
66.在飞行模式下,首先采用可倾转四旋翼机构使机器人处于悬停状态,然后启动大腿驱动电机10直接驱动大腿杆11以大腿驱动电机10的电机轴为中心向靠近飞行平台的一侧旋转,直至大腿杆11处于水平状态;再启动小腿驱动电机9依次通过第一四连杆机构和第二四连杆机构驱动小腿杆12以其与大腿杆11连接处的销轴为中心向靠近大腿杆11的一侧旋转,直至小腿杆12与大腿杆11重叠,此时腿部组件完全回收至机身4的两个纵向安装侧板18侧部,腿部结构具有两个自由度,可以在回收腿部的过程中调整机器人整体的质心位置,保证机器人具有较好的飞行性能;最后采用可倾转四旋翼机构实现垂直起降、垂起转平飞等功能。
67.在地面移动模式下,首先启动小腿驱动电机9依次通过第一四连杆机构和第二四连杆机构驱动小腿杆12以其与大腿杆11连接处的销轴为中心向远离大腿杆11的一侧旋转,然后启动大腿驱动电机10直接驱动大腿杆11以大腿驱动电机10的电机轴为中心向靠近地面的一侧旋转;最后通过轮部驱动电机14驱动轮毂15以及安装在轮毂15上的轮胎16转动,可以实现地面行走功能,在行走过程中,可以实现四轮移动模式与两轮自平衡模式自由切换。
68.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1