一种车辆转向下的悬架控制方法和控制装置与流程
1.本技术涉及车辆减振技术领域,具体而言,涉及一种车辆转向下的悬架控制方法和控制装置。
背景技术:
2.车辆的悬架系统由控制系统、车身和轮胎之间的减震器和弹簧等部件组成。控制系统可以结合车辆的实时运行状态,计算出恰当的驱动信号值并根据驱动信号值调节减震器产生的阻尼力大小,并将调节后的阻尼力施加给弹簧,进而实现为车辆减震的目的,提高车辆的乘坐舒适性。当车辆处于转向过程中时,由于车身会产生侧倾和俯仰,而侧倾和俯仰在一定程度上会降低车辆的乘坐舒适性和安全性,因此,控制系统可以结合车辆的实时运行状态,通过控制减震器产生的阻尼力大小,从而抑制侧倾和俯仰,进而提高车辆的乘坐舒适性与安全性。
3.在现有的在车辆转向过程中的对悬架进行控制的方案存在诸多问题。例如,在一些方案中,主要考虑转向过程中的车身侧倾抑制,而较少关心车身的俯仰姿态,然而,俯仰和侧倾的相互独立性会造成车辆转向过程中车身横摆轴的随机摆动,从而降低车辆过弯时的一致性表现,进一步降低驾驶员的驾驶信心。此外,在对俯仰和侧倾同步控制的方案下,并未对转向机动的紧急程度进行区分而是一味追求侧倾或俯仰姿态抑制,这会导致整车悬架系统偏硬,从而使得不能很好的协调操控需求与舒适需求。
技术实现要素:
4.有鉴于此,本技术的目的在于提供一种车辆转向下的悬架控制方法和控制装置,针对转向机动情况进行了分级分类处理,在低速小转向情况下,同时对车身的侧倾和俯仰进行控制且车身侧倾和俯仰满足设定的比例关系,而在高速大转向情况下,主要抑制车身的侧倾,保持稳定性。从而使得能够克服车辆过弯时的一致性表现不高以及不能很好的协调操控需求与舒适需求的问题。
5.第一方面,本技术实施例提供了一种车辆转向下的悬架控制方法,所述悬架上设置有四个阻尼可调节的减震器,分别为左前减震器,右前减震器,左后减震器和右后减震器,所述悬架控制方法包括:
6.获取与目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻与上一时刻之间的伸缩位移分别对应的左前位移、右前位移、左后位移和右后位移;
7.获取目标车辆当前时刻的车速、方向盘的转向角度和横摆率;
8.基于所述左前位移、所述右前位移、所述左后位移和所述右后位移,确定所述目标车辆的车身的侧倾角、俯仰角和侧倾率;
9.基于所述侧倾率和所述目标车辆当前时刻的车速,利用预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线以及车速与比例系数之间关系的第二曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩;
10.基于所述侧倾角和所述俯仰角,利用预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩;
11.基于所述目标车辆当前时刻的车速、方向盘的转向角度和横摆率,确定横摆率偏差值,并利用预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数之间关系的第四曲线,以及表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻用于对侧倾控制的侧倾控制权重系数和对俯仰控制的俯仰控制权重系数;
12.基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值。
13.可选地,所述基于所述左前位移、所述右前位移、所述左后位移和所述右后位移,确定所述目标车辆的车身的侧倾角、俯仰角、侧倾率,包括:
14.基于所述左前位移和所述右前位移,确定前轴中心点平均位移;
15.基于所述左后位移和所述右后位移,确定后轴中心点平均位移;
16.基于所述左前位移和所述左后位移,确定左侧中心点平均位移;
17.基于所述右前位移和所述右后位移,确定右侧中心点平均位移;
18.基于所述目标车辆的车身宽度、所述左侧中心点平均位移和所述右侧中心点平均位移,确定所述目标车辆的车身的侧倾角;
19.基于所述目标车辆的前轴和后轴之间的前后轴轴距、所述前轴中心点平均位移和所述后轴中心点平均位移,确定所述目标车辆的车身的俯仰角;
20.对所述侧倾角进行微分处理,确定所述目标车辆的车身的侧倾率。
21.可选地,所述基于所述侧倾率和所述目标车辆当前时刻的车速,利用预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线以及车速与比例系数之间关系的第二曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩,包括:
22.基于所述侧倾率和预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线,确定修正侧倾率;
23.基于所述修正侧倾率,利用反馈控制方式,确定用于对期望阻尼力的驱动信号进行反馈控制的初始侧倾控制力矩;
24.基于所述目标车辆当前时刻的车速和预先确定的表征车速与比例系数之间关系的第二曲线,确定用于修正所述初始侧倾控制力矩的比例系数;
25.将所述比例系数和所述初始侧倾控制力拒的乘积,确定为用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩。
26.可选地,所述基于所述侧倾角、俯仰角和侧倾率,利用预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩,包括:
27.基于所述侧倾角、所述侧倾率和预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定期望俯仰角;
28.将所述期望俯仰角和所述俯仰角的差作为偏差俯仰角;
29.基于所述偏差俯仰角,利用反馈控制方式,确定用于对期望阻尼力的驱动信号进
行反馈控制的俯仰控制力矩。
30.可选地,所述基于所述目标车辆当前时刻的车速、方向盘的转向角度和横摆率,确定横摆率偏差值,并利用预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,以及表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻针对侧倾控制的侧倾控制权重系数和针对俯仰控制的俯仰控制权重系数,包括:
31.基于所述目标车辆当前时刻的车速和方向盘的转向角度,确定期望横摆率;
32.将所述期望横摆率和所述横摆率的差值的绝对值确定为横摆率偏差值;
33.基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,确定目标车辆在当前时刻针对侧倾控制的侧倾控制权重系数;
34.基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻针对俯仰控制的俯仰控制权重系数。
35.可选地,所述基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值,包括:
36.基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,确定期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力;
37.对所述左前位移、右前位移、左后位移和右后位移分别进行微分和滤波处理,得到与目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻的伸缩速度分别对应的左前速度、右前速度、左后速度和右后速度;
38.基于所述期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力,以及所述左前速度、所述右前速度、所述左后速度和所述右后速度,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值。
39.可选地,所述基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,确定期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力,包括:
40.将所述侧倾控制力矩和所述侧倾控制权重系数的乘积,确定为加权侧倾力矩;
41.将所述俯仰控制力矩和所述俯仰控制权重系数的乘积,确定为加权俯仰力矩;
42.基于所述加权侧倾力矩、所述加权俯仰力矩、所述车身宽度和所述前后轴轴距,确定期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力。
43.第二方面,本技术实施例提供了一种车辆转向下的悬架控制装置,所述悬架上设置有四个阻尼可调节的减震器,分别为左前减震器,右前减震器,左后减震器和右后减震器,所述悬架控制装置包括:
44.第一获取单元,用于获取与目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻与上一时刻之间的伸缩位移分别对应的左前位移、右前位移、左后位移和右后位移;
45.第二获取单元,用于获取目标车辆当前时刻的车速、方向盘的转向角度和横摆率;
46.车身姿态计算单元,用于基于所述左前位移、所述右前位移、所述左后位移和所述右后位移,确定所述目标车辆的车身的侧倾角、俯仰角和侧倾率;
47.侧倾控制单元,用于基于所述侧倾率和所述目标车辆当前时刻的车速,利用预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线以及车速与比例系数之间关系的第二曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩;
48.俯仰控制单元,用于基于所述侧倾角和所述俯仰角,利用预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩;
49.权重系数确定单元,用于基于所述目标车辆当前时刻的车速、方向盘的转向角度和横摆率,确定横摆率偏差值,并利用预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,以及表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻针对侧倾控制的侧倾控制权重系数和针对俯仰控制的俯仰控制权重系数;
50.驱动值确定单元,用于基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值。
51.第三方面,本技术实施例提供了一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述处理器执行所述机器可读指令,以执行第一方面任一项所述的车辆转向下的悬架控制方法的步骤。
52.第四方面,本技术实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行第一方面任一所述的车辆转向下的悬架控制方法的步骤。
53.本技术实施例提供的车辆转向下的悬架控制方法和控制装置,针对转向机动情况进行了分级分类处理,在低速小转向情况下,同时对车身的侧倾和俯仰进行控制且车身侧倾和俯仰满足设定的比例关系,而在高速大转向情况下,主要抑制车身的侧倾,保持稳定性。从而使得能够克服车辆过弯时的一致性表现不高以及不能很好的协调操控需求与舒适需求的问题。
54.为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
55.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
56.图1示出了本技术示例性实施例提供的一种车辆悬架系统的示意图;
57.图2示出了本技术示例性实施例提供的一种车辆转向下的悬架控制方法的流程
图;
58.图3(a)示出了本技术示例性实施例提供的表征侧倾率和修正侧倾率之间关系的第一曲线的示意图;
59.图3(b)示出了本技术示例性实施例提供的表征车速与比例系数之间关系的第二曲线的示意图;
60.图4示出了本技术示例性实施例提供的车辆转向路径示意图;
61.图5示出了本技术示例性实施例提供的表征侧倾角和期望俯仰角之间关系的第三曲线的示意图;
62.图6(a)示出了本技术示例性实施例提供的表征横摆率偏差值和侧倾控制力矩权重系数之间关系的示意图;
63.图6(b)示出了本技术示例性实施例提供的表征横摆率偏差值和俯仰控制力矩权重系数之间关系的示意图;
64.图7示出了本技术示例性实施例提供的悬架控制装置的软件结构图;
65.图8示出了根据本技术示例性实施例得到的稳态转向下的俯仰侧倾控制结果与根据现有技术得到的控制结果的比较示意图;
66.图9示出了根据本技术示例性实施例得到的稳态转向下的车辆状态时域结果与根据现有技术得到的时域结果的比较示意图;
67.图10示出了根据本技术示例性实施例得到的非稳态转向下的车辆状态时域结果与根据现有技术得到的时域结果的比较示意图;
68.图11示出了本技术示例性实施例提供的一种车辆转向下的悬架控制装置的结构示意图;
69.图12示出了本技术示例性实施例所提供的一种电子设备的结构示意图。
具体实施方式
70.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的每个其他实施例,都属于本技术保护的范围。
71.在本技术提出之前,现有的在车辆转向过程中的对悬架进行控制的方案中,有一些方案主要考虑转向过程中的车身侧倾抑制,而较少关心车身的俯仰姿态,然而,俯仰和侧倾的相互独立性会造成车辆转向过程中车身横摆轴的随机摆动,从而降低车辆过弯时的一致性表现,进一步降低驾驶员的驾驶信心。此外,在对俯仰和侧倾同步控制的方案下,并未对转向机动的紧急程度进行区分而是一味追求侧倾或俯仰姿态抑制,这会导致整车悬架系统偏硬,从而使得不能很好的协调操控需求与舒适需求。
72.基于此,本技术实施例提供了一种车辆转向下的悬架控制方法和控制装置,针对转向机动情况进行了分级分类处理,在低速小转向情况下,车身侧倾和俯仰满足设定的比
例关系,而在高度大转向情况下,主要抑制车身的侧倾,保持稳定性。从而使得能够克服车辆过弯时的一致性表现不高以及不能很好的协调操控需求与舒适需求的问题。
73.为便于对本技术实施例进行理解,首先对本技术实施例所提供的一种车辆的悬架系统进行介绍。
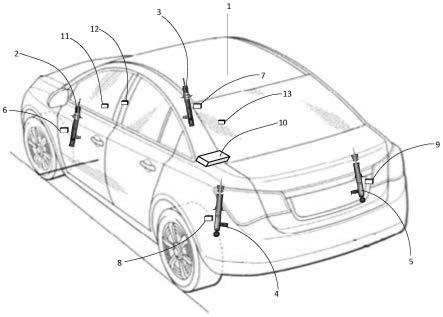
74.请参阅图1,图1示出了本技术示例性实施例提供的一种车辆悬架系统的示意图。如图1所示,所述车辆1的悬架系统包括:
75.设置与车身和车架之间的悬架上的四个阻尼可调节的减震器,分别为左前减震器2、右前减震器3、左后减震器4和右后减震器5,所述左前减震器2、右前减震器3、左后减震器4和右后减震器5均能够根据不同的外部输入电流或电压产生不同的阻尼力。其中,每个减震器均包括弹簧、连杆和衬套等(未在图中标示)。
76.车辆运动和姿态检测装置,用于监测车身不同位置在垂直方向的振动信息以及车身质心横摆运动信息,同时监测车辆行驶速度和转向角度信息。作为示例,车辆运动和姿态检测装置可以包括:设置于左前减震器2附近的位移传感器6、右前减震器3附近的位移传感器7、左后减震器4附近的位移传感器8和右后减震器5附近的位移传感器9,每个位移传感器用于测量对应的减震器的伸缩位移。车辆运动和姿态检测装置还可以包括:车速传感器11、转向角传感器12和横摆率传感器13,车速传感器11用于实时检测车速,转向角传感器12用于实时检测方向盘的转向角度,横摆率传感器用于实时检测车辆1的横摆率。
77.车辆转向下的悬架控制装置10,用于执行本技术实施例提供的悬架控制方法。
78.需要说明的是,上述车辆的悬架系统的部件、结构和设置位置仅仅是示例性地说明车辆的悬架系统,在具体实施时,也可以根据实际情况进行调整,本技术对此不作限制。例如,上述位移传感器也可以用分别设置在车身和车架上的加速度传感器或设置在车辆质心位置的惯性传感器来代替。
79.下面对本技术实施例所公开的一种车辆转向下的悬架控制方法进行详细介绍。
80.请参阅图2,图2示出了本技术示例性实施例提供的一种车辆转向下的悬架控制方法的流程图。所如图2中所示,本技术示例性实施例提供的车辆转向下的悬架控制方法,包括以下步骤:
81.s101、获取与目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻与上一时刻之间的伸缩位移分别对应的左前位移、右前位移、左后位移和右后位移。
82.作为示例,可以从位移传感器实时获取目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻与上一时刻之间的伸缩位移分别对应的左前位移、右前位移、左后位移和右后位移。其中,位移传感器可以是实时检测对应的减震器的伸缩长度,通过当前时刻减震器的伸缩长度和上一时刻减震器的伸缩长度,确定减震器在当前时刻与上一时刻之间的伸缩位移。
83.这里,在所述减震器上设置有弹簧,因为减震器的伸缩位移是通过弹簧跳动实现的,因此减震器的伸缩位移也为减震器上设置的弹簧的伸缩位移。
84.s102、获取目标车辆当前时刻的车速、方向盘的转向角度和横摆率。
85.作为示例,可以从车速传感器实时获取目标车辆当前时刻的车速,作为示例,可以从转向角传感器实时获取目标车辆当前时刻的车速,作为示例,可以从横摆率传感器实时获取目标车辆当前时刻的横摆率。
86.s103、基于所述左前位移、所述右前位移、所述左后位移和所述右后位移,确定所述目标车辆的车身的侧倾角、俯仰角和侧倾率。
87.作为示例,步骤s103可以包括以下步骤:
88.s1031、基于所述左前位移和所述右前位移,确定前轴中心点平均位移;例如,可以基于所述左前位移d1和所述右前位移d2,利用以下公式确定前轴中心点平均位移df:
89.df=(d1+d2)/2;
90.s1032、基于所述左后位移和所述右后位移,确定后轴中心点平均位移;例如,可以基于所述左后位移d3和所述右后位移d4,利用以下公式确定后轴中心点平均位移db:
91.dr=(d3+d4)/2;
92.s1033、基于所述左前位移和所述左后位移,确定左侧中心点平均位移;例如,可以基于所述左前位移d1和所述左后位移d3,利用以下公式确定左侧中心点平均位移dl:
93.dl=(d1+d3)/2;
94.s1034、基于所述右前位移和所述右后位移,确定右侧中心点平均位移;例如,可以基于所述右前位移d2和所述右后位移d4,利用以下公式确定右侧中心点平均位移dr:
95.dr=(d2+d4)/2;
96.s1035、基于所述目标车辆的车身宽度、所述左侧中心点平均位移和所述右侧中心点平均位移,确定所述目标车辆的车身的侧倾角;
97.作为示例,所述车身宽度和所述前后轴轴距可以预先存储在数据库中;
98.例如,可以基于所述车身宽度l1、所述左侧中心点平均位移dl和所述右侧中心点平均位移dr,利用以下公式确定所述目标车辆的车身的侧倾角ra:
99.ra=(dl-dr)/(2
×
l1);
100.s1036、基于所述前后轴轴距、所述前轴中心点平均位移和所述后轴中心点平均位移,确定所述目标车辆的车身的俯仰角;
101.例如,可以基于所述前后轴轴距l2、所述前轴中心点平均位移df和所述后轴中心点平均位移db,利用以下公式确定所述目标车辆的车身的俯仰角pa:
102.pa=(df-db)/(2
×
l2);
103.s1037、对所述侧倾角进行微分处理,获得车身的侧倾率。
104.这里,由于获得的侧倾角表示当前时刻与上一时刻之间的侧倾角,因此,对所述侧倾角进行微分处理,获得车身的侧倾率。这里,所述车身的侧倾率可以用于衡量侧倾角的变化率,在一个示例中,当所述车身的侧倾率为正数时,可以表示车身向左倾斜(即左转弯),在该过程中,车身的倾斜角为正数角度,车身的倾斜角可以越来越大(即向左倾斜的程度越来越大),也可以越来越小(即向左倾斜的程度越来越小);当所述车身的侧倾率为负数时,表示车身向右倾斜(即右转弯),在该过程中,车身的倾斜角为负数角度,车身的倾斜角可以越来越大(即向右倾斜的程度越来越大),也可以越来越小(即向右倾斜的程度越来越小)。
105.这里,具体的微分处理过程为现有技术中与导数相关的微分处理,因此,本技术在此不再赘述。
106.s104、基于所述侧倾率和所述目标车辆当前时刻的车速,利用预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线以及车速与比例系数之间关系的第二曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩。
107.作为示例,该步骤包括:步骤s1041、s1042、s1043和s1044。
108.步骤s1041、基于所述侧倾率和预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线,确定修正侧倾率。
109.请参阅图3(a),图3(a)示出了本技术示例性实施例提供的表征侧倾率和修正侧倾率之间关系的第一曲线的示意图。
110.如图3(a)所示,横轴表示侧倾率rv,纵轴表示修正侧倾率rvr,其中,侧倾率rv的正负表示侧倾的方向,例如,侧倾率为正可以表示向左侧倾,侧倾率为负可以表示向右侧倾,第一曲线表征侧倾率和修正侧倾率之间的关系。第一曲线的拐点对应的侧倾率的数值为侧倾率阈值。可以理解的是,侧倾率的正负不表示侧倾率的大小,而表示车身倾斜的方向,因此侧倾率为正时对应的侧倾率阈值和侧倾率为负时对应的侧倾率阈值是相同的。
111.具体地,为了有效抑制侧倾角,同时为了避免悬架系统对侧倾角的变化过于敏感,所述第一曲线可以被设置为当侧倾率rv的绝对值小于预设的侧倾率阈值时,修正侧倾率rvr的绝对值小于侧倾率rv的绝对值,而当侧倾率rv的绝对值大于预设的侧倾率阈值时,修正侧倾率rvr的绝对值迅速上升并大于侧倾率rv的绝对值。
112.步骤s1042、基于所述修正侧倾率,利用反馈控制方式,确定用于对期望阻尼力的驱动信号进行反馈控制的初始侧倾控制力矩。
113.例如,可以基于所述修正侧倾率,利用以下公式,确定用于对期望阻尼力的驱动信号进行反馈控制的初始侧倾控制力矩mr0:
114.mr0=-(krp
×
rvr+kri
×
rvr/s+krd
×
rvr
×
s);
115.其中,所述krp、kri、krd分别为pid反馈控制率的比例、积分和微分参数,s为传递函数中的微分算子。
116.步骤s1043、基于所述目标车辆当前时刻的车速和预先确定的表征车速与比例系数之间关系的第二曲线,确定用于修正所述初始侧倾控制力矩的比例系数。
117.请参阅图3(b),图3(b)示出了本技术示例性实施例提供的表征车速与比例系数之间关系的第二曲线的示意图。如图3(b)所示,横轴代表车速v,纵轴代表比例系数kr,第二曲线表征车速与比例系数之间的关系,其中,速度v4表示预设的车速阈值。
118.具体地,为了确保目标车辆能够应对越来越高的侧倾风险,所述第二曲线可以被设置为在预设车速阈值范围内比例系数与车速成正比。
119.步骤s1044、将所述比例系数和所述初始侧倾控制力拒的乘积,确定为用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩。
120.例如,可以利用以下公式确定侧倾控制力矩mr:
121.mr=kr
×
mr0;
122.s105、基于所述侧倾角和所述俯仰角,利用预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩。
123.作为示例,该步骤包括:步骤s1051、步骤s1052和步骤s1053。
124.步骤s1051、基于所述侧倾角、所述侧倾率和预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定期望俯仰角;
125.请参阅图4和图5,图4示出了本技术示例性实施例提供的车辆转向路径示意图。图5示出了本技术示例性实施例提供的表征侧倾角和期望俯仰角之间关系的第三曲线的示意
图。
126.如图4所示,车辆向左转弯过程中包括入弯阶段(也即过渡阶段)、稳定阶段和出弯阶段(也即过渡阶段),车辆向右转弯过程中包括入弯阶段(也即过渡阶段)、稳定阶段和出弯阶段(也即过渡阶段)。在车辆处于向左转弯过程中时,若车辆进入入弯阶段,车辆会向左倾斜且倾斜角越来越大,若车辆进入稳定阶段,车辆会保持向左倾斜的倾斜角不变,若车辆进入出弯阶段,车辆会向左倾斜且倾斜角越来越小,直到完成左转向的时刻倾斜角为0。在车辆处于向右转弯过程中时,若车辆进入入弯阶段,车辆会向右倾斜且倾斜角越来越大,若车辆进入稳定阶段,车辆会保持向右倾斜的倾斜角不变,若车辆进入出弯阶段,车辆会向右倾斜且倾斜角越来越小,直到完成右转向的时刻倾斜角为0。
127.下面,将结合图4介绍图5中的第三曲线。如图5所示,横轴表示侧倾角ra,纵轴表示期望俯仰角pad,表征侧倾角和期望俯仰角之间关系的第三曲线包括曲线25、曲线26、曲线27、曲线28、曲线29、曲线30和曲线31。其中,曲线28、曲线26和曲线30可以表示车辆向左转弯过程中的映射关系,曲线27、曲线25和曲线29可以表示车辆向右转弯过程中的映射关系。其中,曲线28可以表示车辆向左转弯且处于入弯阶段过程中倾斜角和期望俯仰角之间的映射关系,曲线26可以表示车辆向左转弯且处于稳定阶段过程中倾斜角和期望俯仰角之间的映射关系,曲线30可以表示车辆向左转弯且处于出弯阶段过程中侧倾角和期望俯仰角之间的映射关系;曲线27可以表示车辆向右转弯且处于入弯阶段过程中倾斜角和期望俯仰角之间的映射关系,曲线25可以表示车辆向右转弯且处于稳定阶段过程中倾斜角和期望俯仰角之间的映射关系,曲线29可以表示车辆向右转弯且处于出弯阶段过程中侧倾角和期望俯仰角之间的映射关系,曲线31可以表示车辆结束转弯过程行驶在直行路过程中侧倾角和期望俯仰角之间的映射关系。
128.这里,为了提高入弯时车辆的转向响应速度和出弯时车辆的稳定性,所述第三曲线可以被设置为,在任一倾斜方向下,前倾俯仰角与侧倾角成正比关系,后倾俯仰角与侧倾角成反比关系。其中,前倾俯仰角可以理解为目标车辆点头时车头与水平面之间的夹角,所述后倾俯仰角可以理解为目标车辆抬头时车头与水平面之间的俯仰角。
129.通过这种方式,可以使得当车辆入弯时,车身通过增大前倾俯仰角来提高前轮与路面的垂向作用力,从而提高转向响应速度;当车辆出弯时,车身通过增大后倾俯仰角来提高后轮与路面的垂向作用力,从而提高出弯的稳定性,从而提高车辆过弯时的一致性表现。
130.此外,在上述基础上,作为示例,第三曲线还可以被设置为在任一倾斜方向下,当倾斜角不变时期望俯仰角为0(如图5中曲线25和曲线26),当倾斜角为0时,期望俯仰角为0(如图5中曲线31)。通过这种方式,可以使得当车辆在稳定阶段时,车身俯仰姿态被抑制,从而确保悬架系统的动作不会影响驾乘人员的驾驶体验。
131.此外,在上述基础上,为了稳定车身横摆轴,所述第三曲线可以被设置为表示面向车头的俯仰角与侧倾角之间的正比关系的曲线的斜率绝对值与表示面向车尾的俯仰角与侧倾角之间的反比关系的曲线的斜率绝对值相同(如图5中曲线28和曲线30的斜率的绝对值相同)。
132.步骤s1052、将所述期望俯仰角和所述俯仰角的差作为偏差俯仰角;
133.例如,可以利用以下公式确定偏差俯仰角pac:
134.pac=pad-pa;
135.其中,pad为期望俯仰角,pa为俯仰角。
136.步骤s1053、基于所述偏差俯仰角,利用反馈控制方式,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩。
137.作为示例,这里所述的反馈控制方式可以为最优控制、h无穷控制或其他控制方式,优选地,反馈控制方式可以为pid控制。
138.当反馈控制方式为pid控制时,例如,可以基于所述偏差俯仰角,利用以下公式,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩mp:
139.mp=kpp
×
pac+kpi
×
pac/s+kpd
×
pac
×
s;
140.其中,kpp、kpi和kpd分别为pid反馈控制率中的比例、积分和微分参数,s为微分算子。
141.s106、基于所述目标车辆当前时刻的车速、方向盘的转向角度和横摆率,确定横摆率偏差值,并利用预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,以及表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻对侧倾控制的侧倾控制权重系数和对俯仰控制的俯仰控制权重系数。
142.作为示例,该步骤包括步骤s1061、步骤s1062、步骤s1063和步骤s1064。
143.步骤s1061、基于所述目标车辆当前时刻的车速和方向盘的转向角度,确定期望横摆率;
144.这里,可以利用现有技术中车辆动力学模型和状态估计理论来基于所述目标车辆当前时刻的车速和方向盘的转向角度,确定期望横摆率。具体实现方式已为现有技术中的现有方式,因此本技术在此不再赘述。
145.步骤s1062、将所述期望横摆率和所述横摆率的差值的绝对值确定为横摆率偏差值;
146.例如,横摆率偏差值可以为|ye-y|;其中,ye为期望横摆率,y为横摆率。
147.步骤s1063、基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,确定目标车辆在当前时刻针对侧倾控制的侧倾控制权重系数;
148.请参阅图6(a),图6(a)示出了本技术示例性实施例提供的表征横摆率偏差值和侧倾控制力矩权重系数之间关系的示意图。
149.如图6(a)所示,横轴表示横摆率偏差值,纵轴表示侧倾控制权重系数。第四曲线表征横摆率偏差值和侧倾控制力矩权重系数之间的关系。
150.具体地,为了实现目标车辆对转向紧急状态的自适应能力,所述第四曲线可以被设置为当横摆率偏差值小于第一横摆率偏差阈值时,侧倾控制力矩权重系数为一个较小的第一常数,当横摆率偏差值介于第一横摆率偏差阈值与第二横摆率偏差阈值之间时,侧倾控制力矩权重系数与横摆率偏差值符合y=kx+b的关系,其中,k和b是根据实际情况选取的,当横摆率偏差值大于第二横摆率偏差阈值时,侧倾控制力矩权重系数为一个较大的第二常数。
151.步骤s1064、基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻针对俯仰控制的俯仰控制权重系数;
152.请参阅图6(b),图6(b)示出了本技术示例性实施例提供的表征横摆率偏差值和俯仰控制力矩权重系数之间关系的示意图。
153.如图6(b)所示,横轴表示横摆率偏差值,纵轴表示俯仰控制权重系数。第五曲线表征横摆率偏差值和俯仰控制力矩权重系数之间的关系。
154.具体地,为了实现目标车辆对转向紧急状态的自适应能力,所述第五曲线可以被设置为当横摆率偏差值小于第一横摆率偏差阈值时,俯仰控制力矩权重系数为一个较大的第三常数,当横摆率偏差值介于第一横摆率偏差阈值与第二横摆率偏差阈值之间时,俯仰控制力矩权重系数与横摆率偏差值符合y=-kx+b的关系,其中,k和b是根据实际情况选取的,当横摆率偏差值大于第二横摆率偏差阈值时,俯仰控制力矩权重系数为一个较小的第四常数。
155.这里,第三常数大于第一常数,第四常数小于第二场数。示例性地,第一常数可以与第四常数相同,第二常数可以与第三常数相同。
156.综上图6(a)和图6(b),当横摆率偏差值小于预设的第一横摆率偏差阈值时,侧倾控制力矩权重系数小于俯仰控制力拒权重系数,当横摆率偏差值大于预设的第二横摆率偏差阈值时,侧倾控制力矩权重系数大于俯仰控制力拒权重系数。通过这种方式,能够使得目标车辆在低速小转向时以侧倾控制和俯仰控制为主,而在高速大转向时切换到以侧倾控制为主的模式。
157.s107、基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值。
158.作为示例,该步骤包括:步骤s1071、步骤s1072和步骤s1073。
159.步骤s1071、基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,确定期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力;
160.作为示例,该步骤可以包括步骤s10711、步骤s10712和步骤s10713。
161.步骤s10711、将所述侧倾控制力矩和所述侧倾控制权重系数的乘积,确定为加权侧倾力矩;
162.例如,可以利用以下公式确定加权侧倾力矩tr:
163.tr=mr
×
wr;
164.步骤s10712、将所述俯仰控制力矩和所述俯仰控制权重系数的乘积,确定为加权俯仰力矩;
165.例如,可以利用以下公式确定加权俯仰力矩tp:
166.tp=mp
×
wp;
167.步骤s10713、基于所述加权侧倾力矩、所述加权俯仰力矩、所述车身宽度和所述前后轴轴距,确定期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力。
168.例如,可以利用下述公式分别确定期望左前减震器产生的期望阻尼力f1,右前减震器产生的期望阻尼力f2,左后减震器产生的期望阻尼力f3和右后减震器产生的期望阻尼力f4:
169.f1=tr/2/l1-tp/2/l2;
170.f2=-tr/2/l1-tp/2/l2;
171.f3=tr/2/l1+tp/2/l2;
172.f4=-tr/2/l1+tp/2/l2;
173.其中,l1表示车身宽度,l2表示前后轴轴距。
174.步骤s1072、对所述左前位移、右前位移、左后位移和右后位移分别进行微分和滤波处理,得到与目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻的伸缩速度分别对应的左前速度、右前速度、左后速度和右后速度;
175.这里,由于获得的左前位移、右前位移、左后位移和右后位移表示当前时刻与上一时刻之间的位移,因此,对所述左前位移、右前位移、左后位移和右后位移分别进行微分和滤波处理,可以得到左前速度、右前速度、左后速度和右后速度。
176.这里,具体的微分处理过程为现有技术中与导数相关的微分处理,因此,本技术在此不再赘述。
177.步骤s1073、基于所述期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力,以及所述左前速度、所述右前速度、所述左后速度和所述右后速度,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值。
178.作为示例,可以预先设置一个驱动值映射关系曲线组,该驱动值映射关系曲线组中包括表征期望左前减震器产生的期望阻尼力、左前速度和驱动左前减震器产生对应的期望阻尼力的驱动值之间关系的第一驱动值映射曲线;表征期望右前减震器产生的期望阻尼力、右前速度和驱动右前减震器产生对应的期望阻尼力的驱动值之间关系的第二驱动值映射曲线;表征期望左后减震器产生的期望阻尼力、左后速度和驱动左后减震器产生对应的期望阻尼力的驱动值之间关系的第三驱动值映射曲线;表征期望右后减震器产生的期望阻尼力、右后速度和驱动右后减震器产生对应的期望阻尼力的驱动值之间关系的第四驱动值映射曲线。
179.在该步骤中,可以基于所述期望左前减震器产生的期望阻尼力、所述左前速度和所述第一驱动值映射曲线,确定驱动左前减震器产生对应的期望阻尼力的驱动值;基于所述期望左后减震器产生的期望阻尼力、所述左后速度和所述第一驱动值映射曲线,确定驱动左后减震器产生对应的期望阻尼力的驱动值;基于所述期望左后减震器产生的期望阻尼力、所述左后速度和所述第一驱动值映射曲线,确定驱动左后减震器产生对应的期望阻尼力的驱动值;基于所述期望右后减震器产生的期望阻尼力、所述右后速度和所述第一驱动值映射曲线,确定驱动右后减震器产生对应的期望阻尼力的驱动值。
180.作为示例,驱动值包括电流值和电压值中的任意一种。在本技术实施例中,当所述阻尼可调节的减震器为电磁阀式减震器时,驱动值可以为电流值。
181.进一步地,在得到了驱动每个减震器产生对应的期望阻尼力的驱动值之后,可以将驱动值输出给对应的减震器,从而实现每个减震器按照驱动值产生对应的阻尼力,从而控制车身姿态满足设计要求。
182.下面,将结合图7对本技术实施例提供的一种车辆转向下的悬架控制方法进行介绍。
183.请参阅图7,图7示出了本技术示例性实施例提供的悬架控制装置的软件结构图。
184.如图7所示,作为示例,减震器速度计算单元14分别从左前行程传感器6、右前行程传感器7、左后行程传感器8和右后行程传感器9获取与目标车辆的左前减震器2,右前减震器3,左后减震器4和右后减震器5在当前时刻与上一时刻之间的伸缩位移分别对应的左前位移d1、右前位移d2、左后位移d3和右后位移d4;
185.减震器速度计算单元14在接收到左前位移d1、右前位移d2、左后位移d3和和右后位移d4后,对所述左前位移d1、右前位移d2、左后位移d3和右后位移d4分别进行微分和滤波处理,得到与目标车辆的左前减震器2,右前减震器3,左后减震器4和右后减震器5在当前时刻的伸缩速度分别对应的左前速度v1、右前速度v2、左后速度v3和右后速度v4,并将左前速度v1、右前速度v2、左后速度v3和右后速度v4分别发送给左前减震器map图21,右前减震器map图22,左后减震器map图23和右后减震器map图24;
186.车身姿态计算单元19在接收到左前位移d1、右前位移d2、左后位移d3和右后位移d4后,基于所述左前位移d1、所述右前位移d2、所述左后位移d3和所述右后位移d4,确定所述目标车辆的车身的侧倾角ra、俯仰角pa和侧倾率rv,并将侧倾率rv发送给侧倾控制单元15,将侧倾角ra、俯仰角pa和侧倾率rv发送给俯仰控制单元16;
187.侧倾控制单元15获取当前时刻的车速v和侧倾率rv并基于所述侧倾率rv和所述目标车辆当前时刻的车速v,利用预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线以及车速与比例系数之间关系的第二曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩mr,并将侧倾控制力矩mr发送给阻尼力分配单元20;
188.俯仰控制单元16在接收到侧倾角ra、俯仰角pa和侧倾率rv之后,基于所述侧倾角ra和所述俯仰角pa,利用预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩mp,并将俯仰控制力矩mp发送给阻尼力分配单元20;
189.横摆率估计单元17用于分别从转向角传感器11、车速传感器12,获取目标车辆当前时刻的车速v和方向盘的转向角度t,并基于所述目标车辆当前时刻的车速v和方向盘的转向角度t,确定期望横摆率ye,并将期望横摆率ye发送给稳态评估单元18;
190.稳态评估单元18接收横摆率传感器发送的横摆率y,并在接收到横摆率y和期望横摆率ye之后,将所述期望横摆率ye和所述横摆率y的差值的绝对值确定为横摆率偏差值;在确定了横摆率偏差值之后,基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,确定目标车辆在当前时刻针对侧倾控制的侧倾控制权重系数wr,并且,基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻针对俯仰控制的俯仰控制权重系数wp,并将侧倾控制权重系数wr和俯仰控制权重系数wp发送给阻尼力分配单元20;
191.阻尼力分配单元20在接收到所述侧倾控制力矩mr、所述俯仰控制力矩mp、所述侧倾控制权重系数wr和所述俯仰控制权重系数wp之后,基于所述侧倾控制力矩mr、所述俯仰控制力矩mp、所述侧倾控制权重系数wr和所述俯仰控制权重系数wp,确定期望左前减震器2,右前减震器3,左后减震器4和右后减震器5分别产生的期望阻尼力f1、f2、f3和f4,并将期望阻尼力f1、f2、f3和f4分别发送给左前减震器map图21,右前减震器map图22,左后减震器
map图23和右后减震器map图24;
192.左前减震器map图21,基于所述期望左前减震器2产生的期望阻尼力f1和所述左前速度v1,确定驱动所述左前减震器2产生的期望阻尼力f1的驱动值i1;
193.右前减震器map图22,基于所述期望右前减震器3产生的期望阻尼力f2和所述右前速度v2,确定驱动所述右前减震器3产生的期望阻尼力f2的驱动值i2;
194.左后减震器map图23,基于所述期望左后减震器4产生的期望阻尼力f3和所述左后速度v3,确定驱动所述左后减震器4产生的期望阻尼力f3的驱动值i3;
195.右后减震器map图24,基于所述期望右后减震器5产生的期望阻尼力f4和所述右后速度v4,确定驱动所述右后减震器4产生的期望阻尼力f4的驱动值i4。
196.此外,为了进一步说明本技术所提供的悬架控制方法的有益效果,提供了本技术中悬架控制方法与传统悬架控制方法的实现效果对比图。具体地,请参阅图8、图9和图10。图8示出了根据本技术示例性实施例得到的稳态转向下的俯仰侧倾控制结果与根据现有技术得到的控制结果的比较示意图;图9示出了根据本技术示例性实施例得到的稳态转向下的车辆状态时域结果与根据现有技术得到的时域结果的比较示意图;图10示出了根据本技术示例性实施例得到的非稳态转向下的车辆状态时域结果与根据现有技术得到的时域结果的比较示意图。
197.如图8所示,曲线34表示本技术实施例的控制结果,曲线33表示比较例的控制结果,通过对比曲线34和曲线33可以看出,本发明可以让目标车辆在稳态转向下(低速小转向下)的侧倾角和俯仰角实现“蝴蝶型”稳态转向,使得当车辆入弯时,车身通过增大前倾俯仰角来提高前轮与路面的垂向作用力,从而提高转向响应速度;当车辆出弯时,车身通过增大后倾俯仰角来提高后轮与路面的垂向作用力,从而提高出弯的稳定性,从而提高了车辆过弯时的一致性表现。
198.如图9所示,图9可以描述低速小转向情况下(稳态转向情况下)通过图5所示路径时的时域下的车辆状态,其中,曲线35为侧向加速度曲线,曲线36和37分别为实施例和比较例的侧倾率曲线,曲线38和39分别为实施例和比较例的俯仰率曲线,曲线40和41分别为实施例和比较例的侧倾角曲线,曲线42和43分别为实施例和比较例的俯仰角曲线。
199.通过对比图9中曲线42和43可以看出,稳态转向情况下,本技术实施例可以让车辆入弯时增大前倾俯仰角,而在出弯时增大后倾俯仰角,即实现本发明期望的入弯点头和出弯抬头姿态。进一步的,对比图9中曲线36和37可以发现,稳态转向情况下,本发明实施例会略微增大侧倾率从而实现俯仰姿态动作。但由于是稳态转向,这种侧倾率增大不会对车辆操控性造成明显影响。
200.图10可以描述高速大转向情况下(即非稳态转向情况下)通过图5所示路径时的时域下车辆状态,其中曲线44为侧向加速度曲线,曲线45和46分别为比较例和实施例的侧倾角曲线,曲线47和48分别为比较例和实施例的侧倾率曲线。对比图10中的曲线45和46,以及曲线47和48,可以发现本发明实施例能够有效减小侧倾率的变化幅值,提高车身稳定性。
201.结合图8-图10,可以看出,本技术实施例能够在稳态转向情况下,协调车身俯仰和侧倾,使二者满足“蝴蝶型”关系,从而稳定车身横摆轴、提高入弯响应和出弯稳定性。在车辆面临紧急转向情况下(高速大转向情况下),本技术实施例能够迅速由“蝴蝶型”稳态转向切换到使得侧倾角减小的非稳态转向,从而提高车轮抓地能力,提高操控性。这种切换能
力,正是本发明对转向紧急程度的自适应能力体现。综上所述,以上作用效果有效佐证了本技术的技术优势。
202.基于同一发明构思,本技术实施例中还提供了与上述车辆转向下的悬架控制方法对应的悬架控制装置。
203.参见图11所示,图11为本技术示例性实施例提供的一种悬架控制装置的结构示意图,该悬架控制装置1100包括:
204.第一获取单元1101,用于获取与目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻与上一时刻之间的伸缩位移分别对应的左前位移、右前位移、左后位移和右后位移;
205.第二获取单元1102,用于获取目标车辆当前时刻的车速、方向盘的转向角度和横摆率;
206.车身姿态计算单元1103,用于基于所述左前位移、所述右前位移、所述左后位移和所述右后位移,确定所述目标车辆的车身的侧倾角、俯仰角和侧倾率;
207.侧倾控制单元1104,用于基于所述侧倾率和所述目标车辆当前时刻的车速,利用预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线以及车速与比例系数之间关系的第二曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩;
208.俯仰控制单元1105,用于基于所述侧倾角和所述俯仰角,利用预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩;
209.权重系数确定单元1106,用于基于所述目标车辆当前时刻的车速、方向盘的转向角度和横摆率,确定横摆率偏差值,并利用预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,以及表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻针对侧倾控制的侧倾控制权重系数和针对俯仰控制的俯仰控制权重系数;
210.驱动值确定单元1107,用于基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值。
211.在一种可能的实施方式中,车身姿态计算单元1103,具体用于:
212.基于所述左前位移和所述右前位移,确定前轴中心点平均位移;
213.基于所述左后位移和所述右后位移,确定后轴中心点平均位移;
214.基于所述左前位移和所述左后位移,确定左侧中心点平均位移;
215.基于所述右前位移和所述右后位移,确定右侧中心点平均位移;
216.基于所述目标车辆的车身宽度、所述左侧中心点平均位移和所述右侧中心点平均位移,确定所述目标车辆的车身的侧倾角;
217.基于所述目标车辆的前轴和后轴之间的前后轴轴距、所述前轴中心点平均位移和所述后轴中心点平均位移,确定所述目标车辆的车身的俯仰角;
218.对所述侧倾角进行微分处理,确定所述目标车辆的车身的侧倾率。
219.在一种可能的实施方式中,侧倾控制单元1104,具体用于:
220.基于所述侧倾率和预先确定的表征侧倾率和修正侧倾率之间关系的第一曲线,确
定修正侧倾率;
221.基于所述修正侧倾率,利用反馈控制方式,确定用于对期望阻尼力的驱动信号进行反馈控制的初始侧倾控制力矩;
222.基于所述目标车辆当前时刻的车速和预先确定的表征车速与比例系数之间关系的第二曲线,确定用于修正所述初始侧倾控制力矩的比例系数;
223.将所述比例系数和所述初始侧倾控制力拒的乘积,确定为用于对期望阻尼力的驱动信号进行反馈控制的侧倾控制力矩。
224.在一种可能的实施方式中,俯仰控制单元1105,具体用于:
225.基于所述侧倾角、所述侧倾率和预先确定的表征侧倾角和期望俯仰角之间关系的第三曲线,确定期望俯仰角;
226.将所述期望俯仰角和所述俯仰角的差作为偏差俯仰角;
227.基于所述偏差俯仰角,利用反馈控制方式,确定用于对期望阻尼力的驱动信号进行反馈控制的俯仰控制力矩。
228.在一种可能的实施方式中,权重系数确定单元1106,具体用于:
229.基于所述目标车辆当前时刻的车速和方向盘的转向角度,确定期望横摆率;
230.将所述期望横摆率和所述横摆率的差值的绝对值确定为横摆率偏差值;
231.基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和侧倾控制力矩权重系数关系的第四曲线,确定目标车辆在当前时刻针对侧倾控制的侧倾控制权重系数;
232.基于所述横摆率偏差值和预先确定的表征所述横摆率偏差值和俯仰控制力矩权重系数之间关系的第五曲线,确定目标车辆在当前时刻针对俯仰控制的俯仰控制权重系数。
233.在一种可能的实施方式中,驱动值确定单元1107,具体用于:
234.基于所述侧倾控制力矩、所述俯仰控制力矩、所述侧倾控制权重系数和所述俯仰控制权重系数,确定期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力;
235.对所述左前位移、右前位移、左后位移和右后位移分别进行微分和滤波处理,得到与目标车辆的左前减震器,右前减震器,左后减震器和右后减震器在当前时刻的伸缩速度分别对应的左前速度、右前速度、左后速度和右后速度;
236.基于所述期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力,以及所述左前速度、所述右前速度、所述左后速度和所述右后速度,分别确定驱动所述左前减震器、所述右前减震器,所述左后减震器和所述右后减震器产生对应的期望阻尼力的驱动值。
237.在一种可能的实施方式中,驱动值确定单元1107,还具体用于:
238.将所述侧倾控制力矩和所述侧倾控制权重系数的乘积,确定为加权侧倾力矩;
239.将所述俯仰控制力矩和所述俯仰控制权重系数的乘积,确定为加权俯仰力矩;
240.基于所述加权侧倾力矩、所述加权俯仰力矩、所述车身宽度和所述前后轴轴距,确定期望左前减震器,右前减震器,左后减震器和右后减震器分别产生的期望阻尼力。
241.请参阅图12,图12为本技术实施例所提供的一种电子设备的结构示意图。如图12中所示,所述电子设备1200包括处理器1210、存储器1220和总线1230。
242.所述存储器1220存储有所述处理器1210可执行的机器可读指令,当电子设备1200运行时,所述处理器1210与所述存储器1220之间通过总线1230通信,所述机器可读指令被所述处理器1210执行时,可以执行如上述方法实施例中的车辆转向下的悬架的控制方法的步骤,具体实现方式可参见方法实施例,在此不再赘述。
243.本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时可以执行如上述方法实施例中的车辆转向下的悬架的控制方法的步骤,具体实现方式可参见方法实施例,在此不再赘述。
244.所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
245.在本技术所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
246.所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
247.另外,在本技术各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
248.所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个处理器可执行的非易失的计算机可读取存储介质中。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本技术各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
249.最后应说明的是:以上所述实施例,仅为本技术的具体实施方式,用以说明本技术的技术方案,而非对其限制,本技术的保护范围并不局限于此,尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本技术实施例技术方案的精神和范围,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1