车辆用显示控制装置、车辆用显示装置、车辆、车辆用显示控制方法以及存储介质与流程
1.本公开涉及车辆用显示控制装置、车辆用显示装置、车辆、车辆用显示控制方法以及存储介质。
背景技术:
2.在日本特开2021-37895号公报中公开有以下发明,即,当在与车辆行驶中的行驶车道邻接的邻接车道行驶中的其他车辆有可能向行驶车道并线时,平视显示器显示其他车辆的预计的行驶轨迹。
3.在日本特开2021-37895号公报的发明中,对于使驾驶员识别在邻接车道行驶中的其他车辆执行中的并线动作,尚有改善的余地。
技术实现要素:
4.考虑上述事实,本公开的目的在于获得一种容易使驾驶员识别在邻接车道行驶中的其他车辆执行中的并线动作的车辆用显示控制装置、车辆用显示装置、车辆、车辆用显示控制方法以及存储介质。
5.本公开的第1形态所涉及的车辆用显示控制装置具备处理器,上述处理器构成为:当在与作为本车辆行驶中的车道的行驶车道邻接的邻接车道行驶中的其他车辆执行从上述邻接车道向上述行驶车道的比上述本车辆靠前方的并线位置移动的并线动作时,对能够显示表示上述行驶车道的行驶车道图像、表示上述邻接车道的邻接车道图像、表示规定上述行驶车道与上述邻接车道的边界的车道边界线的车道边界线图像以及表示上述其他车辆的其他车辆图像的显示部进行,以便上述显示部使上述其他车辆图像从上述邻接车道图像上的第1位置向上述车道边界线图像上的第2位置不连续地移动。
6.在本公开的第1形态所涉及的车辆用显示控制装置中,当在与本车辆行驶中的行驶车道邻接的邻接车道行驶中的其他车辆执行从邻接车道向行驶车道的并线位置移动的并线动作时,被处理器控制的显示部以使表示其他车辆的其他车辆图像从表示邻接车道的邻接车道图像上的第1位置向表示规定行驶车道与邻接车道的边界的车道边界线的车道边界线图像上的第2位置不连续地移动的方式进行显示。因此观察到其他车辆图像的驾驶员容易识别在邻接车道行驶中的其他车辆正在执行并线动作中。即,与以从第1位置向第2位置连续地移动的方式显示其他车辆图像的情况相比,观察到其他车辆图像的驾驶员更容易识别在邻接车道行驶中的其他车辆正在执行并线动作中。
7.本公开的第2形态所涉及的车辆用显示控制装置构成为:在本公开的第1形态的基础上,在上述其他车辆执行上述并线动作时,上述处理器控制上述显示部,以便使上述其他车辆图像从上述第2位置向与上述行驶车道图像上的上述并线位置对应的第3位置不连续地移动。
8.在本公开的第2形态中,在其他车辆执行并线动作时,被处理器控制的显示部以使
其他车辆图像从第2位置向与行驶车道图像上的并线位置对应的第3位置不连续地移动的方式进行显示。因此,观察到其他车辆图像的驾驶员容易识别其他车辆正在执行并线动作中。即,与以从第2位置向第3位置连续地移动的方式显示其他车辆图像的情况相比,观察到其他车辆图像的驾驶员更容易识别其他车辆正在执行并线动作中。
9.本公开的第3形态所涉及的车辆用显示控制装置构成为:在本公开的第1形态的基础上,在基于在上述邻接车道行驶的上述其他车辆的行为而判定为上述其他车辆有可能执行上述并线动作时,上述处理器使上述其他车辆图像显示于上述显示部。
10.在本公开的第3形态中,在基于在邻接车道行驶的其他车辆的行为而判定为其他车辆有可能执行并线动作时,处理器使其他车辆图像显示于显示部。仅将与被判定为有可能执行并线动作的其他车辆对应的其他车辆图像显示于显示部,因此与将表示在邻接车道行驶的所有的其他车辆的其他车辆图像显示于显示部的情况相比,驾驶员不易感到厌烦。
11.本公开的第4形态所涉及的车辆用显示控制装置构成为:在本公开的第1~第3形态的任一形态的基础上,上述处理器控制上述显示部,以便将表示在上述本车辆的前方位于上述邻接车道上的上述其他车辆的上述其他车辆图像显示于以下的多个位置中的一个位置,该多个位置被以沿着前后方向排列的方式设定在上述邻接车道图像上。
12.在本公开的第4形态中,将表示在本车辆的前方位于邻接车道上的其他车辆的其他车辆图像显示于以沿着前后方向排列的方式设定在邻接车道图像上的多个位置中的一个位置。因此,观察到其他车辆图像的驾驶员能够识别表示有可能执行并线动作的其他车辆的其他车辆图像的沿着前后方向的位置。
13.本公开的第5形态所涉及的车辆用显示控制装置构成为:在本公开的第4形态的基础上,在位于比上述多个位置中的规定位置靠后方的特定位置的上述其他车辆图像位于上述第1位置与上述第2位置的至少一方时,上述处理器控制上述显示部,以便将位于上述特定位置的上述其他车辆图像以不同于位于与上述特定位置不同的位置的上述其他车辆图像的形态进行显示。
14.在本公开的第5形态中,在位于比多个位置中的规定位置靠后方的特定位置的其他车辆图像位于第1位置与第2位置的至少一方时,位于特定位置的其他车辆图像以不同于位于与特定位置不同的位置的其他车辆图像的形态进行显示。与该其他车辆图像对应的其他车辆与本车辆的前后方向距离较短,因此需要充分注意由该其他车辆进行的并线动作。由于以这样形态显示与这样的其他车辆对应的其他车辆图像,因此能够引起观察到其他车辆图像的驾驶员对于由该其他车辆进行的并线动作的充分注意。
15.本公开的第6形态所涉及的车辆用显示控制装置构成为:在本公开的第1~第5形态的任一形态的基础上,在判定为从上述邻接车道向上述行驶车道移动的上述其他车辆是对于执行追随控制中的上述本车辆而言的前车时,上述处理器控制上述显示部,以便将被判定为是上述前车的上述其他车辆图像以不同于未被判定为是上述前车的上述其他车辆图像的形态进行显示。
16.在本公开的第6形态中,在处理器判定为从邻接车道向行驶车道移动的其他车辆是对于执行追随控制中的本车辆而言的前车时,显示部以与未被判定为是前车的其他车辆图像不同的形态显示被判定为是前车的其他车辆图像。因此,观察到其他车辆图像的驾驶员能够识别与其他车辆图像对应的其他车辆是否是对于本车辆而言的前车。
17.本公开的第7形态所涉及的车辆用显示装置具备显示部、和本公开的第1~第6形态的任一形态的上述车辆用显示控制装置。
18.本公开的第8形态所涉及的车辆具备本公开的第7形态所涉及的上述车辆用显示装置。
19.本公开的第9形态所涉及的车辆用显示控制方法构成为:当在与作为本车辆行驶中的车道的行驶车道邻接的邻接车道行驶中的其他车辆执行从上述邻接车道向上述行驶车道的比上述本车辆靠前方的并线位置移动的并线动作时,处理器对能够显示表示上述行驶车道的行驶车道图像、表示上述邻接车道的邻接车道图像、表示规定上述行驶车道与上述邻接车道的边界的车道边界线的车道边界线图像以及表示上述其他车辆的其他车辆图像的显示部进行控制,以便上述显示部使上述其他车辆图像从上述邻接车道图像上的第1位置向上述车道边界线图像上的第2位置不连续地移动。
20.本公开的第10形态所涉及的存储介质是存储程序并且可供计算机读取的存储介质,在由处理器执行该程序时,执行以下步骤:当在与作为本车辆行驶中的车道的行驶车道邻接的邻接车道行驶中的其他车辆执行从上述邻接车道向上述行驶车道的比上述本车辆靠前方的并线位置移动的并线动作时,对能够显示表示上述行驶车道的行驶车道图像、表示上述邻接车道的邻接车道图像、表示规定上述行驶车道与上述邻接车道的边界的车道边界线的车道边界线图像以及表示上述其他车辆的其他车辆图像的显示部进行控制,以便上述显示部使上述其他车辆图像从上述邻接车道图像上的第1位置向上述车道边界线图像上的第2位置不连续地移动。
21.如以上说明的那样,本公开所涉及的车辆用显示控制装置、车辆用显示装置、车辆、车辆用显示控制方法以及存储介质具有容易使驾驶员识别在邻接车道行驶中的其他车辆执行中的并线动作的优异的效果。
附图说明
22.将基于以下附图详细地描述本发明的示例性实施例,其中,
23.图1是表示具备实施方式所涉及的车辆用显示控制装置的车辆的内部的图。
24.图2是表示图1所示的车辆的硬件结构的图。
25.图3是车辆的显示控制ecu的功能框图。
26.图4是车辆的adas-ecu的功能框图。
27.图5是表示形成于显示器和显示区域的图像的示意图。
28.图6是其他车辆向第2位置移动时的与图5相同的示意图。
29.图7是其他车辆向第3位置移动时的与图5相同的示意图。
30.图8是表示车辆的显示控制ecu执行的处理的流程图。
具体实施方式
31.以下,边参照附图边对本公开所涉及的车辆用显示控制装置、车辆用显示装置、车辆10、车辆用显示控制方法以及存储介质的实施方式进行说明。
32.如图1所示,本实施方式的车辆(本车辆)10具备前挡风玻璃14和仪表板16。在仪表板16设置有显示器(显示部)(车辆用显示装置)18和驾驶辅助开关24。在前挡风玻璃14的车
内侧面的上部设置有传感器群20。传感器群20包括照相机、激光成像探测与测距(laser imaging detection and ranging)传感器、定位照相机以及毫米波雷达传感器的至少一个。驾驶辅助开关24是用于使车辆10执行后述的驾驶辅助控制的开关。
33.如图2所示,车辆10除了显示器18、传感器群20以及驾驶辅助开关24之外还具有显示控制ecu(车辆用显示控制装置)26、平视显示器(以下,称为hud)(显示部)(车辆用显示装置)28、车辆导航ecu32、gps装置34以及adas-ecu36作为硬件结构。
34.显示控制ecu26构成为包括cpu(central processing unit:中央处理器)(处理器)26a、rom(read only memory:只读存储器)(非临时性存储介质)(存储介质)26b、ram(random access memory:随机存储器)26c、存储机构(非临时性存储介质)(存储介质)26d、无线通信i/f(interface)26e、车内通信i/f26f以及输入输出i/f26g。cpu26a、rom26b、ram26c、存储机构26d、无线通信i/f26e、车内通信i/f26f以及输入输出i/f26g经由内部总线26z相互可通信地连接。
35.cpu26a是中央运算处理单元,执行各种程序、控制各部。cpu26a从rom26b或者存储机构26d读出程序,并将ram26c作为作业区域来执行程序。cpu26a根据记录于rom26b或者存储机构26d的程序来进行各结构的控制和各种运算处理。
36.rom26b储存各种程序和各种数据。ram26c作为作业区域临时地存储程序或者数据。存储机构26d由hdd(hard disk drive:硬盘驱动器)或者ssd(solid state drive:固态硬盘)等存储装置构成,储存各种程序和各种数据。
37.无线通信i/f26e是用于与各种设备无线通信的接口。例如无线通信i/f26e能够与后述的其他车辆70a、70b的无线通信机无线通信。无线通信i/f26e使用bluetooth(注册商标)、wi-fi(注册商标)等通信标准。
38.车内通信i/f26f是用于经由外部总线26h与车辆导航ecu32及adas-ecu36连接的接口。该接口例如使用基于can协议的通信标准。
39.输入输出i/f26g是用于与显示器18及hud28通信的接口。
40.在图3中用框图示出了显示控制ecu26的功能结构的一例。显示控制ecu26具有显示控制部261和通信控制部262作为功能结构。通过cpu26a读出并执行在rom26b存储的程序来实现显示控制部261和通信控制部262。
41.显示控制部261如后述的那样控制显示器18和hud28。
42.通信控制部262控制无线通信i/f26e和车内通信i/f26f。
43.hud28具有投影装置30。通过反射镜(省略图示)将从投影装置30投影的图像向前方反射,由此在形成于前挡风玻璃14的显示区域ha(参照图1)显示各种图像。
44.车辆导航ecu32和adas-ecu36构成为包括cpu(处理器)、rom、ram、存储机构、无线通信i/f、车内通信i/f以及输入输出i/f。cpu、rom、ram、存储机构、无线通信i/f、车内通信i/f以及输入输出经由内部总线相互可通信地连接。
45.车辆导航ecu32控制车辆导航系统。在车辆导航ecu32的rom或者存储机构记录有地图数据。在车辆导航ecu32连接有gps装置34。gps装置34具有接收来自gps卫星的信号的gps天线(省略图示)。
46.在adas-ecu36连接有传感器群20和驾驶辅助开关24。另外,adas-ecu36与用于使制动器装置、转向装置以及内燃机(驱动源)驱动的各种致动器连接。adas-ecu36也可以与
电动马达(驱动源)连接。
47.在图4中用框图示出了adas-ecu36的一例。adas-ecu36具有驾驶辅助控制部361和并线判定部362作为功能结构。通过cpu读出并执行在rom存储的程序来实现驾驶辅助控制部361和并线判定部362。
48.驾驶辅助控制部361具有通过控制上述致动器群(和电动马达)来使车辆10执行驾驶辅助控制的功能。本说明书中的“驾驶辅助控制”包括sae(society of automotive engineers)(美国汽车技术协会)划定的等级1~5的驾驶等级的驾驶辅助控制。驾驶辅助控制例如包括acc(adaptive cruise control:自适应巡航控制)和cacc(cooperative adaptive cruise control:协同自适应巡航控制)。驾驶辅助开关24的初始状态是off状态。若驾驶辅助开关24变为开启状态,则车辆10能够执行驾驶辅助控制。若进一步操作处于开启状态的驾驶辅助开关24,则乘员能够使车辆10执行等级1~5的中的任意的驾驶辅助控制。
49.并且驾驶辅助控制部361在执行追随控制(acc或者cacc)的过程中判定在车辆10的前方行驶的车辆是否相当于前车。并且当在追随控制的执行中驾驶辅助控制部361使上述制动器装置自动地动作时,如图1所示,显示器18显示表示制动动作的图像18a。
50.并线判定部362具有基于传感器群20取得的信息来判定是否在车辆10当前所行驶的道路60(参照图1)所包括的任一车道上存在其他车辆70a、70b的功能。并且,并线判定部362基于传感器群20取得的信息来运算其他车辆70a、70b的车道宽度方向的位置和车道的延长方向的位置。
51.并且并线判定部362具有以下功能,即,基于传感器群20取得的信息,判定在与车辆10行驶的行驶车道61(参照图1)邻接的邻接车道62a、62b(参照图1)行驶的其他车辆70a、70b(参照图1)是否有可能执行向作为行驶车道61的比车辆10靠前方的区域的并线位置移动的并线动作和是否正在执行并线动作中。此外,并线判定部362也可以基于日本特开2021-37895号公报所公开的判定逻辑来进行该判定。
52.adas-ecu36将与通过驾驶辅助开关24选择的驾驶辅助控制有关的信息向显示控制ecu26发送。
53.接着,使用图5~图7对显示于显示器18和显示区域ha的图像进行说明。此外,图5~图7所示的图像是示意性地表示车辆10的驾驶员d(参照图1)通过视觉识别的风景的图像。其中,为了便于说明,将这些风景(图像)作为从高于驾驶员d的眼睛的位置观察的情况下的图像来描绘。
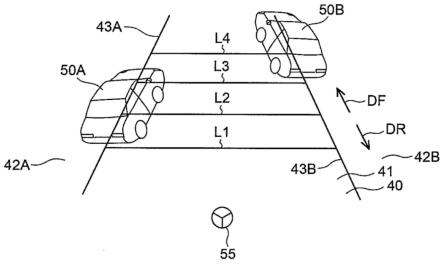
54.在显示器18和显示区域ha中显示图5~图7所示的道路图像40。图5~图7所示的箭头dr表示车辆10的后方侧,箭头df表示车辆10的前方侧(行进方向)。道路图像40是基于在车辆导航ecu32的存储机构记录的上述地图数据的图像。例如,如图1所示,在车辆10当前所行驶的道路60包括行驶车道61和与行驶车道61邻接的两个邻接车道62a、62b的情况下,道路图像40包括行驶车道图像41和两个邻接车道图像42a、42b。行驶车道图像41是与行驶车道61对应的图像,邻接车道图像42a是与邻接车道62a对应的图像,邻接车道图像42b是与邻接车道62b对应的图像。
55.例如,在显示控制ecu26的显示控制部261基于从车辆导航ecu32(gps装置34)取得的信息而识别为车辆10正在行驶车道61行驶中时,显示控制部261以在行驶车道图像41上
显示本车辆图像55的方式控制显示器18和hud28。行驶车道图像41包括位于比本车辆图像55靠前方的位置的第1线l1、第2线l2、第3线l3以及第4线l4。第1线l1、第2线l2、第3线l3以及第4线l4分别表示比车辆10(本车辆图像55)靠前方的位置。与从车辆10到第1线l1的距离相比,从车辆10到第2线l2的距离较长,与从车辆10到第2线l2的距离相比,从车辆10到第3线l3的距离较长,与从车辆10到第3线l3的距离相比,从车辆10到第4线l4的距离较长。
56.例如,在并线判定部362基于传感器群20取得的信息而判定为其他车辆70a正在邻接车道62a行驶并且其他车辆70b正在邻接车道62b行驶时,将该判定结果从adas-ecu36向显示控制ecu26发送。由此,显示控制ecu26的显示控制部261控制显示器18和hud28,使与其他车辆70a、70b分别对应的其他车辆图像50a、50b重叠地显示于显示器18和显示区域ha的邻接车道图像42a、42b。并且并线判定部362基于从传感器群20取得的信息和gps装置34取得的位置信息来运算车辆10与其他车辆70a、70b的距离。将关于该距离的信息从adas-ecu36向显示控制ecu26发送。接收到关于距离的信息的显示控制ecu26的显示控制部261调整邻接车道图像42a上的其他车辆图像50a的位置和邻接车道图像42b上的其他车辆图像50b的位置。例如,在从车辆10到其他车辆70a的距离为规定的较短的距离的情况下,如图5所示,以其后端部的前后位置为与第1线l1相同的位置的方式显示其他车辆图像50a。在从车辆10到其他车辆70b的距离为规定的较长的距离的情况下,如图5所示,以其后端部的前后位置为与第3线l3相同的位置的方式显示其他车辆图像50b。
57.(作用和效果)
58.接下来,对本实施方式的作用和效果进行说明。
59.接着,使用图8的流程图对车辆10的显示控制ecu26执行的处理进行说明。显示控制ecu26每经过规定时间就反复执行图8所示的流程图的处理。
60.在步骤s10中,显示控制ecu26的显示控制部261基于从adas-ecu36接收到的信息来判定其他车辆70a、70b是否正在邻接车道62a、62b行驶。
61.在步骤s10中判定为是的显示控制ecu26进入至步骤s11,基于从adas-ecu36接收到的信息来判定其他车辆70a、70b是否正在执行并线动作中。
62.在步骤s11中判定为是的显示控制ecu26进入至步骤s12,基于从adas-ecu36接收到的信息来判定其他车辆70a、70b是否位于第1位置。第1位置是其他车辆70a、70b的车宽度方向的中心点在俯视视角中与邻接车道62a、62b的车道宽度方向的中央部重合时的、其他车辆70a、70b的车道宽度方向的位置。邻接车道62a、62b的中央部的车道宽度方向的尺寸具有一定程度的长度。即,第1位置不是特定的一点。在其他车辆70a、70b位于第1位置时,其他车辆70a、70b远离车道边界线63a、63b。
63.在判定为其他车辆70a、70b位于邻接车道62a、62b上的第1位置时,显示控制ecu26进入至步骤s13,如图5所示,显示控制部261将其他车辆图像50a、50b重叠地显示于邻接车道图像42a、42b。此时其他车辆图像50a远离车道边界线图像43a,并且其他车辆图像50b远离车道边界线图像43b。
64.并且此时,例如,如图5所示,以其他车辆图像50a的后端部的前后位置位于与第1线l1相同的位置、并且其他车辆图像50b的后端部的前后位置位于与第3线l3相同的位置的方式显示其他车辆图像50a、50b。
65.完成了步骤13的处理的显示控制ecu26进入至步骤s14,判定任意一个其他车辆
70a、70b的后端部是否位于比与第2线l2对应的位置(规定位置)靠后方的与第1线l1对应的位置(特定位置)。
66.在步骤s14中判定为是的显示控制ecu26进入至步骤s15,将在步骤s14中判定为是的其他车辆70a对应的其他车辆图像50a用不同于之外的其他车辆图像50b的颜色显示。例如,用灰色(gray)显示与在步骤s14中判定为否的其他车辆70b对应的其他车辆图像50b,用黄色显示与在步骤s14中判定为是的其他车辆70a对应的其他车辆图像50a。对于与在步骤s14中判定为是的其他车辆70a对应的其他车辆图像50a的颜色而言,同与判定为否的其他车辆70b对应的其他车辆图像50b的颜色相比,优选采用对驾驶员d的视觉给予较大的刺激的颜色。
67.此外,在用黄色显示的其他车辆图像50a的后端部位于与第1线l1对应的位置并且移动至后述的第2位置时,其他车辆图像50a也可以保持用黄色显示的状态不变。另外,在用黄色显示的其他车辆图像50a的后端部位于与第1线l1对应的位置并且移动至第2位置时,其他车辆图像50a也可以用灰色(gray)显示。
68.完成了步骤s15的处理的显示控制ecu26进入至步骤s16,基于从adas-ecu36接收到的信息来判定其他车辆70a、70b是否位于第2位置。第2位置是在俯视视角中其他车辆70a、70b的车宽度方向的中央部与邻接车道62a、62b重合时的其他车辆70a、70b的车道宽度方向的位置。其他车辆70a、70b的中央部的车宽度方向的尺寸具有一定程度的长度。即,第2位置并不是特定的一点。
69.在判定为其他车辆70a、70b位于邻接车道62a、62b上的第2位置时,显示控制ecu26进入至步骤s17,如图6所示,显示控制部261将其他车辆图像50a、50b重叠地显示于车道边界线图像43a、43b。
70.此时显示控制部261以表示其他车辆70a、70b的其他车辆图像50a、50b从第1位置向第2位置不连续地移动的方式使其他车辆图像50a、50b显示于显示器18和显示区域ha。在本说明书和权利要求书中“其他车辆图像50a、50b从第1位置向第2位置不连续地移动”是指,在显示于与邻接车道图像42a、42b的第1位置对应的位置的其他车辆图像50a、50b一旦从显示器18和显示区域ha消失后,其他车辆图像50a、50b将被重叠地显示于与车道边界线图像43a、43b的第2位置对应的位置。
71.并且,在步骤s17中,显示控制部261参照其他车辆70a、70b的前后方向的位置并且将其他车辆图像50a、50b重叠地显示于邻接车道图像42a、42b。例如,显示控制部261以其他车辆图像50a的后端部位于与第1线l1对应的位置、并且其他车辆图像50b的后端部位于与第3线l3对应的位置的方式使其他车辆图像50a、50b重叠地显示于车道边界线图像43a、43b。
72.完成了步骤s17的处理的显示控制ecu26进入至步骤s18,基于从adas-ecu36接收到的信息,判定其他车辆70a、70b是否位于行驶车道61上的第3位置(并线位置)。第3位置是指在俯视视角中其他车辆70a、70b位于车道边界线63a与车道边界线63b之间并且离开车道边界线63a和车道边界线63b的车道宽度方向的位置。即,第3位置并不是特定的一点。
73.在判定为其他车辆70a、70b位于行驶车道61上的第3位置时,显示控制ecu26进入至步骤s19。如图7所示,显示控制部261参照其他车辆70a、70b的前后方向的位置并且将其他车辆图像50a、50b重叠地显示于行驶车道图像41。例如,显示控制部261以其他车辆图像
50a的后端部位于与第1线l1对应的位置、并且其他车辆图像50b的后端部位于与第3线l3对应的位置的方式使其他车辆图像50a、50b重叠地显示于行驶车道图像41。
74.此时显示控制部261以表示其他车辆70a、70b的其他车辆图像50a、50b从第2位置向第3位置不连续地移动的方式使它们显示于显示器18和显示区域ha。在本说明书和权利要求书中“其他车辆图像50a、50b从第2位置向第3位置不连续地移动”是指在重叠地显示于与车道边界线63a、63b的第2位置对应的位置的其他车辆图像50a、50b从显示器18和显示区域ha一旦消失后,其他车辆图像50a、50b将被重叠地显示于与行驶车道图像41的第3位置对应的位置。
75.完成了步骤s19的处理的显示控制ecu26进入至步骤s20,基于从adas-ecu36接收到的信息,判定adas-ecu36是否正在执行追随控制(acc或者cacc)中。
76.在步骤s20中判定为是的显示控制ecu26进入至步骤s21,基于从adas-ecu36接收到的信息,判定与显示于行驶车道图像41的其他车辆图像50a、50b对应的其他车辆70a与其他车辆70b的任意一个是否相当于对于车辆10而言的前车。
77.在步骤s21中判定为是的显示控制ecu26进入至步骤s22,将与在步骤s21中判定为是的其他车辆70a对应的其他车辆图像50a用不同于之外的其他车辆图像50b的颜色显示。例如,用灰色(gray)显示与在步骤s21中判定为否的其他车辆70b对应的其他车辆图像50b,用白色显示与在步骤s21中判定为是的其他车辆70a对应的其他车辆图像50a。对于与在步骤s21中判定为是的其他车辆70a对应的其他车辆图像50a的颜色而言,同与判定为否的其他车辆70b对应的其他车辆图像50b的颜色相比,优选采用对驾驶员d的视觉给予较大的刺激的颜色。
78.当在步骤s10、s11、s12、s16、s18、s20、s21中判定为否时,或者在完成了步骤s22的处理时,显示控制ecu26暂时结束图8的流程图的处理。
79.如以上说明的那样,当在邻接车道62a、62b行驶中的其他车辆70a、70b执行从邻接车道62a、62b向行驶车道61的并线位置移动的并线动作时,显示器18和hud28以使其他车辆图像50a、50b从邻接车道图像42a、42b上的第1位置向车道边界线图像43a、43b上的第2位置不连续地移动的方式进行显示。因此,观察到其他车辆图像50a、50b的驾驶员d容易识别在邻接车道62a、62b行驶中的其他车辆70a、70b正在执行并线动作中。例如,与以从第1位置向第2位置连续地移动的方式显示其他车辆图像50a、50b的情况相比,驾驶员d更容易识别其他车辆70a、70b正在执行并线动作中。
80.并且,在其他车辆70a、70b执行并线动作时,显示器18和hud28以使其他车辆图像50a、50b从第2位置向与行驶车道图像41上的并线位置对应的第3位置不连续地移动的方式进行显示。因此,观察到其他车辆图像50a、50b的驾驶员d容易识别在邻接车道62a、62b行驶中的其他车辆70a、70b正在执行并线动作中。例如,与以从第2位置向第3位置连续地移动的方式显示其他车辆图像50a、50b的情况相比,驾驶员d更容易识别其他车辆70a、70b正在执行并线动作中。
81.并且,在显示器18和hud28仅显示表示由adas-ecu36(并线判定部362)判定为存在执行并线动作的可能性(正在执行)的其他车辆70a、70b的其他车辆图像50a、50b。因此,与显示器18和hud28显示表示在邻接车道62a、62b行驶的所有的其他车辆的其他车辆图像的情况相比,驾驶员d不易感到厌烦。
82.并且,将表示位于邻接车道62a、62b上的其他车辆70a、70b的其他车辆图像50a、50b显示于与以在邻接车道图像42a、42b上沿着前后方向(邻接车道图像42a、42b的延长方向)排列的方式设定的第1线l1、第2线l2、第3线l3、第4线l4分别对应的多个位置中的一个。因此,观察到其他车辆图像50a、50b的驾驶员d能够识别存在执行并线动作的可能性的其他车辆70a、70b的沿着前后方向的位置。
83.并且,用不同于位于第2线l2~第4线l4的其他车辆图像50a、50b的形态(黄色)显示表示位于与邻接车道62a、62b上的第1线l1对应的位置的其他车辆70a、70b的其他车辆图像50a、50b。与该其他车辆图像50a、50b对应的其他车辆70a、70b与车辆10的前后方向距离较短,因此需要充分注意由该其他车辆70a、70b进行的并线动作。由于用黄色显示与这样的其他车辆70a、70b对应的其他车辆图像50a、50b,因此能够引起观察到其他车辆图像50a、50b的驾驶员d对于由该其他车辆70a、70b进行的并线动作的充分注意。
84.并且,在adas-ecu36(驾驶辅助控制部361)判定为从邻接车道62a、62b向行驶车道61移动的其他车辆70a、70b是对于正执行追随控制中的车辆10而言的前车时,显示器18和hud28以不同于不是前车的其他车辆图像50a、50b的形态(白色)显示该其他车辆图像50a、50b。因此,观察到其他车辆图像50a、50b的驾驶员d能够识别与其他车辆图像50a、50b对应的其他车辆70a、70b是否是对于车辆10而言的前车。
85.以上,对实施方式所涉及的车辆用显示控制装置、车辆用显示装置、车辆、车辆用显示控制方法以及存储介质进行了说明,但车辆用显示控制装置、车辆用显示装置、车辆、车辆用显示控制方法以及存储介质在不脱离本公开的主旨的范围内能够适当地进行设计变更。
86.例如,也可以构成为:车辆10不具备显示器18与显示区域ha的至少一方。
87.也可以构成为:仅显示器18与显示区域ha的一方显示道路图像40、其他车辆图像50a、50b以及本车辆图像55。
88.也可以构成为:显示器18与显示区域ha的至少一方将道路图像40和其他车辆图像50a、50b显示为俯视视角中的道路和其他车辆时的形状。
89.也可以构成为:在其他车辆70a、70b位于第1位置时,不用黄色显示其他车辆图像50a、50b,在其他车辆70a、70b移动至第2位置时用黄色显示其他车辆图像50a、50b。
90.也可以构成为:将表示位于与邻接车道62a、62b上的第1线l1对应的位置的其他车辆70a、70b的其他车辆图像50a、50b以不同于黄色显示并且不同于位于第2线l2~第4线l4的其他车辆图像50a、50b的形态进行显示。例如,也可以闪烁显示这样的其他车辆图像50a、50b。
91.也可以构成为:权利要求书的“特定位置”是与第1线l1及第2线l2分别对应的位置、或者是与第1线l1、第2线l2以及第3线l3分别对应的位置。
92.也可以构成为:显示于行驶车道图像41的线的数量是4条以外的多个。
93.也可以构成为:将作为前车的其他车辆图像50a、50b以不同于白色显示并且不同于不是前车的其他车辆图像50a、50b的形态显示。例如,也可以闪烁显示这样的其他车辆图像50a、50b。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1