一种适用于自动驾驶场景的汽车转向控制方法与流程
本发明涉及转向系统,具体地说是一种适用于自动驾驶场景的汽车转向控制方法。
背景技术:
1、在自动驾驶场景下,电动助力转向器需要能够支持在驾驶员不脱手工况下的车道偏离辅助或变道辅助,且能够支持驾驶员脱手情况下的自动驾驶。市场需要能够在驾驶员脱手工况下支持整车精准控制车辆的横向移动并能够快速响应整车控制请求,且能够满足针对脱手工况下整车功能安全目标要求的转向系统。在不脱手工况下辅助驾驶时,市场期望在驾驶员人为接管方向盘过程中获得更好的驾驶手感,实现好的人机共驾体验。
2、目前市场上主流的汽车电动助力转向器支持不脱手工况下的自动驾驶功能,高级驾驶员辅助系统通常根据电容方向盘或者驾驶员手力矩大小来判断是否处于脱手状态,若驾驶员长时间不握紧方向盘,系统会进行脱手警告甚至退出高级驾驶员辅助驾驶系统。在人机共驾背景下驾驶员人为接管方向盘,由于转向系统无法正确地理解驾驶员意图,此时将出现驾驶员与高级驾驶员辅助驾驶系统争夺装向控制权的情况,驾驶转向手感体验差,甚至出现方向盘抖动等异常现象。
3、相较于只支持不脱手工况的转向系统,同时支持脱手和不脱手工况高级驾驶员辅助驾驶功能的电动助力转向器能更进一步解放双手,使用场景更广。此外支持人机共驾功能的高级驾驶员辅助系统能使不脱手工况下的驾驶员接管更为轻松,平顺。
技术实现思路
1、本发明为克服现有技术的不足,提供一种适用于自动驾驶场景的汽车转向控制方法,在l2.5级自动驾驶等场景下,转向系统既能够支持不脱手场景下的辅助驾驶,又能够支持驾驶员双手脱离方向盘工况下的自动驾驶,同时能够精准识别出驾驶员的接管意图,并在控制执行端作出相应的动作,为驾驶员提供更好的驾驶体验。
2、为实现上述目的,设计一种适用于自动驾驶场景的汽车转向控制方法,其特征在于:具体方法流程如下:
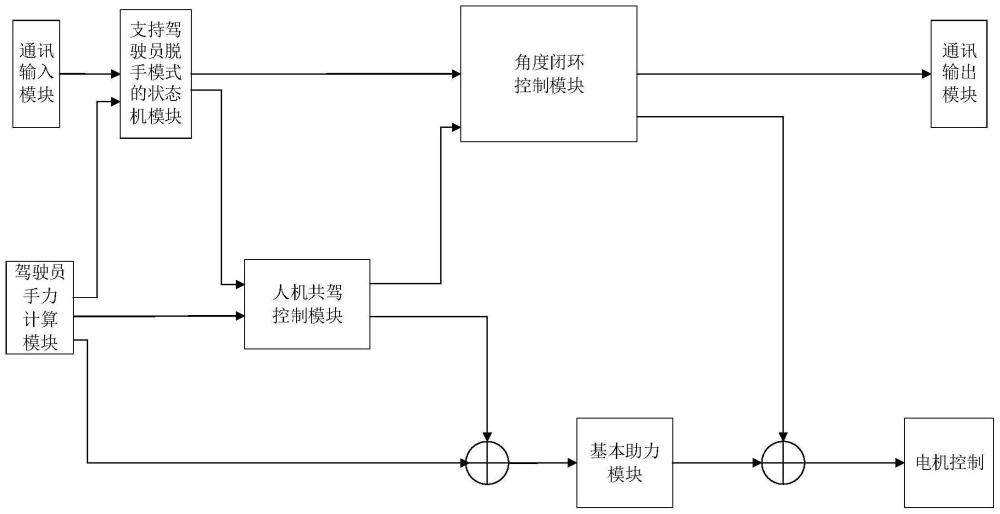
3、步骤1,电动助力转向系统实时接收来自高级驾驶员辅助控制器的输入信号;高级驾驶员辅助控制器的输入信号主要包括:功能使能信号、期望的车轮转角或方向盘转角信号;
4、步骤2,获取当前转向系统状态、车速、方向盘扭矩,当电动助力转向系统的系统状态、车速和方向盘扭矩满足功能使能激活条件时,高级驾驶员辅助控制器请求激活功能使能,根据高级驾驶员辅助控制器请求的期望车轮转角或方向盘转角信号计算出目标转向齿条位置;
5、步骤3,获取步骤2中功能状态机输出的系统激活状态,并根据驾驶员手力计算模块采集的方向盘扭矩,判断人机共驾状态机模式;
6、步骤4,获取步骤3中人机共驾状态机模式时,计算每一种人机共驾状态对应的电机舒适性扭矩上下限值,以及方向盘补偿扭矩;
7、步骤5,获取上一周期时刻闭环控制模块计算出的目标转向电机扭矩,以及人机共驾状态机模式时计算出的电机舒适性扭矩上下限值,依据二者大小关系计算角度闭环控制模块中积分停止系数和积分清零系数;
8、步骤6,获取实际转向齿条位置,根据目标转向齿条位置和实际转向齿条位置计算目标转向齿条速度;
9、步骤7,获取当前转向助力电机的转速,根据电机端到齿条端传动比系数,计算出当前齿条速度,在计算的过程中,需要对电机转速做有效性判断,并对最终计算得到的齿条速度做上下限饱和限制;
10、步骤8,获取步骤7中当前齿条速度,根据目标转向齿条速度与当前齿条速度之差,计算出目标转向电机扭矩;
11、步骤9,对步骤8中计算输出的目标转向电机扭矩做安全限制;
12、步骤10,获取驾驶员手力模块计算的方向盘扭矩,并根据步骤4中计算的方向盘补偿扭矩,通过查表基本助力模块得到方向盘扭矩产生的电机端附加扭矩,并叠加至步骤9中电机安全限制扭矩,作为自动驾驶场景下转向控制系统对电机请求的总扭矩。
13、所述的步骤2中,根据当前方向盘力矩判断当前驾驶员是否有接管方向盘意图,当驾驶员手力矩大于驾驶员接管最大设定值且保持一段设定时间时,判断驾驶员有接管意图,可脱手或不脱手模式驾驶辅助功能退出,当方向盘扭矩小于驾驶员接管最大设定值且保持一段设定时间时,判断驾驶员无接管意图,保持可脱手或不脱手模式驾驶辅助功能激活。
14、所述的功能使能激活条件为:车速大于最小设定值且小于最大设定值;方向盘扭矩小于最大设定值;电动助力转向系统状态正常;转角传感器正常;成功接收高级驾驶员辅助控制器请求的不脱手或可脱手模式激活信号。
15、所述的在步骤2中,通过齿条位置与车轮转角或方向盘转角的机械转换关系,将期望的期望车轮转角或方向盘转角信号转换为期望齿条位置,并将目标转向齿条位置限制在期望齿条位置的最大设定值之内,根据高级驾驶员辅助控制器请求可脱手或不脱手模式,该设定值分别对应一组随车速变化的曲线。
16、所述的在步骤3中,根据当前方向盘扭矩判断当前驾驶工况是否处于人机共驾场景,在步骤2中驾驶辅助功能已激活前提下,当驾驶员手力矩大于人机共驾设定值且保持一段设定时间时,判断驾驶员有介入转向的意图,人机共驾状态机进入驾驶员主导模式;当驾驶员手力矩小于人机共驾设定值且保持一段设定时间时,判断驾驶员取消介入转向的意图,人机共驾状态机进入自动驾驶接管模式;当步骤2中驾驶辅助功能退出激活状态时,人机共驾状态机立即进入人机共驾退出模式。
17、所述的在步骤4中,获取步骤3中人机共驾状态机状态,使用如下计算方法计算每一种人机共驾状态对应的电机舒适性扭矩上下限值:
18、(1)人机共驾状态机处于人机共驾退出模式时,舒适性扭矩上下限值分别为设定值a1,a2;
19、(2)人机共驾状态机处于自动驾驶接管模式时,舒适性扭矩上下限值分别为设定值b1,b2;
20、(3)人机共驾状态机处于驾驶员主导模式时,舒适性扭矩上下限值分别为设定值c1,c2;
21、(4)人机共驾状态机从人机共驾退出模式进入自动驾驶接管模式时,舒适性扭矩上下限值分别从设定值a1,a2变为设定值b1,b2;
22、(5)人机共驾状态机从自动驾驶接管模式进入驾驶员主导模式时,舒适性扭矩上下限值分别以设定的斜率k1,k2变化到设定值c1,c2;
23、(6)人机共驾状态机从驾驶员主导模式进入自动驾驶接管模式时,舒适性扭矩上下限值分别以设定的斜率l1,l2变化到设定值b1,b2;
24、(7)人机共驾状态机从驾驶员主导模式或自动驾驶接管模式进入人机共驾退出模式时,舒适性扭矩上下限值分别变为设定值a1,a2;
25、其中,设定值a1,a2,b1,b2,c1,c2,斜率k1,k2,l1,l2均为一组随车速变化的曲线。
26、所述的在步骤4中,获取步骤3中人机共驾状态机状态,使用如下计算方法计算方向盘补偿扭矩:
27、(1)系统处于驾驶员主导模式或者人机共驾退出模式时,方向盘补偿扭矩为0;
28、(2)系统处于自动驾驶接管模式时,方向盘补偿扭矩按如下公式计算:toffset=-(tstr-tzerooffset),其中,toffset为方向盘补偿扭矩,tstr为方向盘扭矩传感器采样值,tzerooffset为方向盘扭矩传感器零偏值。
29、所述的在步骤5中,获取上一周期时刻角度闭环控制模块计算出的目标转向电机扭矩,以及人机共驾模块计算出的电机舒适性扭矩上下限值,按如下算法计算角度闭环控制模块中积分停止系数和积分清零系数:
30、(1)当目标电机扭矩受到舒适性电机扭矩输出上限值或下限值的限制,且舒适性电机扭矩输出上限值或下限值的变化次数未超过其设定阈值时,积分保持系数xipartstop置为0,积分清零系数xipartclear置为1;
31、(2)当目标电机扭矩受到舒适性电机扭矩输出上限值或下限值的限制,且舒适性电机扭矩输出上限值或下限值的变化次数超过其设定阈值时,积分保持系数xipartstop置为1,积分清零系数xipartclear置为0;
32、(3)当目标电机扭矩不再受到舒适性电机扭矩输出上限值和下限值的限制时,积分保持系数xipartstop置为1,积分清零系数xipartclear置为1。
33、所述的在步骤6中,目标转向齿条速度的计算公式如下:
34、vtar=pv*(ltar-lact)+(iv*(ltar-lact)*xipartstop+ivpartlast)*xipartclear,其中,vtar为目标的转向齿条速度,ltar为目标的转向齿条位置,lact为实际的转向齿条位置, ivpartlast为计算目标转向齿条速度的积分项的上一周期值,xipartclear为人机共驾策略中积分清零系数,xipartstop为人机共驾策略中积分保持系数,pv,iv为计算目标转向齿条速度的参数。
35、所述的在步骤6中,获取实际转向齿条位置采用分段pi控制,即p和i系数根据转向齿条位置目标值和实际值偏差采用如下分段查表算法:
36、其中,lbufferzone为区分缓冲区和稳定区pi控制的齿条位置偏差的界限。
37、所述的在步骤7中,计算得到的齿条速度做上下限饱和限制:
38、
39、其中,vactual为当前的齿条速度,单位:mm/s,vrot为当前的转向电机转子速度,单位:mm/s,xgearsign为转向电机驱动正方向,xmot2rack为转向电机到齿条的传动比。
40、所述的在步骤8中,目标电机扭矩的计算公式如下:
41、mtorque=p*(vtar-vact)+(i*(vtar-vact)*xipartstop+impartlast)*xipartclear,其中,mtorque为目标的电机扭矩,vtar为目标的齿条速度,vact为实际的齿条速度,p,i为计算目标电机扭矩的参数,impartlast为计算目标电机扭矩的积分项的上一周期值, xipartstop为积分保持系数,xipartclear为积分清零系数。
42、所述的在步骤8中,获取当前齿条速度采用分段pi控制,即p和i系数根据转向齿条速度目标值和实际值偏差采用如下分段查表算法:
43、
44、其中,vbufferzone为区分缓冲区和稳定区pi控制的齿条速度偏差的临界值。
45、所述的在步骤9中,对步骤8中经饱和限制过的目标转向电机扭矩做如下安全限制:
46、(1)获取步骤2中功能状态机输出的系统激活状态,当系统状态为不脱手模式状态,目标转向电机扭矩将被限制在最大设定值之内,该设定值为一组随车速变化的特定曲线;当系统状态为可脱手模式状态,目标转向电机扭矩将受到另一组随车速变化的特定曲线限制,且上述两组曲线可根据转向功能安全目标进行调整;
47、(2)设置转向电机扭矩梯度限制设定值,以避免步骤2中功能状态机从可脱手模式切换到不脱手模式时,因扭矩安全限制值的突变导致角度闭环控制模块的非预期电机扭矩输出。
48、所述的在步骤9中,当检测到该功能激活或输出的扭矩不为0时,需要将主动回正模块的输出扭矩将为0,以避免主动回正模块对该功能的影响。
49、所述的在步骤10中,获取驾驶员手力模块计算的方向盘扭矩,步骤4中计算的方向盘补偿扭矩,并对方向盘扭矩和补偿扭矩进行叠加,对叠加后的扭矩查表基本助力曲线,得到方向盘扭矩产生的电机端附加扭矩,最终自动驾驶场景下转向控制系统对电机请求的总扭矩为步骤9中输出的电机安全限制扭矩和电机端附加扭矩之和。
50、所述的在步骤10中,当步骤2中功能状态机处于不脱手模式或可脱手模式时,基本助力曲线切换到自动驾驶模式专用曲线,且该曲线可根据实车调校手感进行调整。
51、本发明同现有技术相比,提供一种适用于自动驾驶场景的汽车转向控制方法,在l2.5级自动驾驶等场景下,转向系统既能够支持不脱手场景下的辅助驾驶,又能够支持驾驶员双手脱离方向盘工况下的自动驾驶,同时能够精准识别出驾驶员的接管意图,并在控制执行端作出相应的动作,为驾驶员提供更好的驾驶体验。
52、本发明接收高级驾驶员辅助控制器的角度接口信号,且能够支持驾驶员不脱手和可脱手两种驾驶模式,扩大了辅助驾驶系统的应用场景。
53、本发明解决了驾驶辅助执行控制层面的协同共驾问题,能够真正识别驾驶员转向意图,帮助驾驶员从人机共驾场景平滑地过渡到驾驶员接管场景。
- 还没有人留言评论。精彩留言会获得点赞!