一种智能网联客车电机制动扭矩计算方法及系统与流程
1.本发明属于汽车控制技术领域,尤其涉及一种智能网联客车电机制动扭矩计算方法及系统。
背景技术:
2.本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
3.随着市场竞争的加剧,产品的节能、舒适等特性逐渐成为智能网联电动客车技术研发的方向;能量回收作为智能网联纯电动客车节能的重要途径之一,如何精准地控制电机制动扭矩,保证整车能量回收最优,同时提高车辆的舒适性,成为当前智能网联车辆关键的技术之一。
4.目前公开的大多数智能网联车辆制动扭矩计算方法,通过采集制动踏板开度和电机转速计算电机制动扭矩,存在的问题是:当制度踏板开度或电机转速出现波动时,会引起制动扭矩波动,从而加剧电机抖动,影响整车能耗和驾驶舒适性;尽管现有的制动扭矩控制方案中,对控制策略进行了改进,但依然存在节能效果和舒适度不高的问题。
技术实现要素:
5.为克服上述现有技术的不足,本发明提供了一种智能网联客车电机制动扭矩计算方法及系统,通过对制动踏板开度值进行模糊处理,同时对电机转速进行最优值计算,以及增加电机扭矩退出滞环策略,实时控制电机制动扭矩,避免刹车时因制动踏板开度或电机转速异常引起的电机抖动问题,提高整车节能和舒适性。
6.为实现上述目的,本发明的一个或多个实施例提供了如下技术方案:
7.本发明第一方面提供了一种智能网联客车电机制动扭矩计算方法;
8.一种智能网联客车电机制动扭矩计算方法,包括:
9.对整车控制器激活后获取的制动踏板开度进行模糊处理;
10.根据模糊处理后的制动踏板开度,计算制动系数和电机转速最优值;
11.实时采集车辆电机转速,判断制动扭矩的滞环状态;
12.基于滞环状态、制动系数和电机转速最优值,计算得到最终电机制动扭矩。
13.进一步的,所述模糊处理的具体步骤为:
14.整车控制器激活后,通过硬线信号获得制动踏板开度;
15.对制动踏板开度进行滤波处理;
16.对滤波后的制动踏板开度进行模糊处理。
17.进一步的,所述制动系数的计算方法为:
18.如果制动踏板开度低于5%,则设为空行程,制动系数为0;
19.如果制动踏板开度在5%-30%之间,则根据比例关系计算制动系数;
20.如果制动踏板开度高于30%,制动系数设为100%。
21.进一步的,所述电机转速最优值的计算方法为:
22.如果制动踏板开度小于5%,则认为车辆处于非制动状态,电机转速最优值为实际电机转速;
23.若制动踏板开度大于5%,则认为车辆进入制动状态,根据电机基准转速与实际电机转速的实时比较结果,设定电机转速最优值的值。
24.进一步的,当制动踏板开度大于5%,车辆进入制动状态,将进入制动状态前一刻的电机转速设为电机基准转速,实时比较电机基准转速与当前实际电机转速的大小:
25.(1)若电机基准转速小于实际电机转速,则电机基准转速保持不变;
26.若电机基准转速大于实际电机转速,则将电机基准转速数值更新为当前实际电机转速;
27.(2)电机转速最优值为电机基准转速。
28.进一步的,所述滞环状态的判断方法为:
29.电机转速低于150rm,滞环状态f lag为1,电机不允许有制动扭矩;
30.电机转速高于400rm,滞环状态f lag为0,允许电机有制动扭矩;
31.电机转速高于150rpm且低于400rm,滞环状态flag保持上一时刻的值。
32.进一步的,所述最终电机制动扭矩的计算方法为:
33.若滞环状态flag为1,则整车控制器请求的电机制动扭矩为0;
34.若滞环状态flag等于0,则通过制动系数k、电机转速最优值n
rpm
以及不同电机转速下电机允许的最大制动扭矩获得。
35.本发明第二方面提供了一种智能网联客车电机制动扭矩计算系统。
36.一种智能网联客车电机制动扭矩计算系统,包括模糊处理模块、参数计算模块、状态判断模块和扭矩计算模块:
37.模糊处理模块,被配置为:对整车控制器激活后获取的制动踏板开度进行模糊处理;
38.参数计算模块,被配置为:根据模糊处理后的制动踏板开度,计算制动系数和电机转速最优值;
39.状态判断模块,被配置为:实时采集车辆电机转速,判断制动扭矩的滞环状态;
40.扭矩计算模块,被配置为:基于滞环状态、制动系数和电机转速最优值,计算得到最终电机制动扭矩。
41.本发明第三方面提供了计算机可读存储介质,其上存储有程序,该程序被处理器执行时实现如本发明第一方面所述的一种智能网联客车电机制动扭矩计算方法中的步骤。
42.本发明第四方面提供了电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本发明第一方面所述的一种智能网联客车电机制动扭矩计算方法中的步骤。
43.以上一个或多个技术方案存在以下有益效果:
44.本发明提供的一种智能网联客车电机制动扭矩计算方法及系统,通过对制动踏板开度值进行模糊处理,同时对电机转速进行最优值计算,以及增加电机扭矩退出滞环策略,实时计算电机制动扭矩,对整车的电机进行控制,避免刹车时因制动踏板开度或电机转速异常引起的电机抖动问题,提高整车节能和舒适性,降低了车辆能耗。
45.本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
46.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
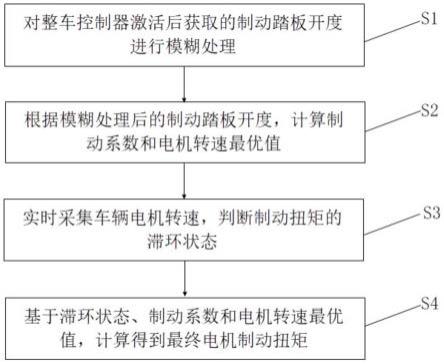
47.图1为第一个实施例的方法流程图。
48.图2为第二个实施例的系统结构图。
具体实施方式
49.下面结合附图与实施例对本发明作进一步说明。
50.应该指出,以下详细说明都是示例性的,旨在对本发明提供进一步的说明;除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
51.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式;如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
52.实施例一
53.本实施例公开了一种智能网联客车电机制动扭矩计算方法;
54.如图1所示,一种智能网联客车电机制动扭矩计算方法,包括:
55.步骤s1:对整车控制器激活后获取的制动踏板开度进行模糊处理;
56.整车控制器激活后,通过硬线信号获得制动踏板开度p1,然后对制动踏板开度进行滤波处理,获得制动踏板开度p2,计算公式如下:
57.p2=0.5
×
p2(n-1)+0.5
×
p1(n)
58.其中,p2(n-1)为上一时刻计算的制动踏板开度,p1(n)为本时刻采集到制动踏板开度。
59.将滤波后的制动踏板开度p2进行模糊处理,变成5的整倍数,舍去非5整倍数的开度值,从而避免制动踏板开度变化太频繁导致电机扭矩波动,计算公式如下:
[0060][0061]
其中,uint8函数为取整函数,p3为模糊处理后的制动踏板开度,该值为5的整倍数。
[0062]
步骤s2:根据模糊处理后的制动踏板开度,计算制动系数和电机转速最优值;
[0063]
整车控制器根据模糊处理的制动踏板开度p3计算相应的制动系数k,为避免制动踏板开度过于灵敏,影响车辆正常行驶,具体为:
[0064]
如果制动踏板开度低于5%则设为空行程,制动系数k为0;
[0065]
为提高车辆制动舒适性,在车辆气刹介入之前,按照线性比列关系计算制动系数,即制动踏板开度在5%-30%之间根据比例关系得到制动系数;
[0066]
为提高电机回收能量占比,降低整车能耗,气刹介入后,制动系数为最大,即踏板开度高于30%,制动系数设为100%;
[0067]
上述制动系数k的设置逻辑,如公式所示:
[0068][0069]
其中,p3是模糊处理后的制动踏板开度。
[0070]
电机转速最优值的计算,是整车控制器通过车辆制动踏板开度值p3判断车辆是否处于制动状态,根据制动状态,设置电机转速最优值,具体为:
[0071]
若制动踏板开度小于5%,则认为车辆处于非制动状态,电机转速最优值n
rpm
为实际电机转速n0;
[0072]
若制动踏板开度大于5%,则认为车辆进入制动状态,此时将进入制动状态前一刻的电机转速设为基准转速为ns,车辆在制动状态下,实时比较基准转速ns与当前实际电机转速n0的大小,若ns小于n0,则基准转速ns保持不变,若ns大于n0,则将给基准转速ns数值更新为当前电机转速值;电机转速最优值n
rpm
=ns。
[0073]
步骤s3:实时采集车辆电机转速,判断制动扭矩的滞环状态;
[0074]
为了避免车辆制动电机转速降为零瞬间,电机制动扭矩依然存在,可能导致车辆出现倒车的情况,相应的电机转速下降的同时整车请求的制动扭矩也随之降低,设置电机转速150rpm为制动扭矩退出阈值;若电机转速高于150rm,则制动时有电机制动扭矩,若电机转速低于150rm,则电机制动扭矩为零。
[0075]
为避免电机制动扭矩在制动扭矩退出阈值150rpm附近频繁变化,增加制动扭矩滞环状态f l ag判断。
[0076]
若电机转速低于150rm,滞环状态f lag为1,电机不允许有制动扭矩;
[0077]
若电机转速高于400rm,滞环状态f lag为0,允许电机有制动扭矩;
[0078]
若电机转速高于150rpm且低于400rm,滞环状态f lag保持上一时刻的值。
[0079]
步骤s4:基于滞环状态、制动系数和电机转速最优值,计算得到最终电机制动扭矩。
[0080]
若滞环状态f lag为1,则整车控制器请求的最终电机制动扭矩t=0;
[0081]
若滞环状态flag等于0,则通过制动系数k、电机转速最优值n
rpm
以及不同电机转速下电机允许的最大制动扭矩获得,具体为:
[0082]
首先根据电机转速最优值n
rpm
查表获得当前转速值电机允许的最大制动扭矩t
max
,然后乘以制动系数k计算最终的电机制动请求扭矩t,具体公式如下:
[0083][0084]
实施例二
[0085]
本实施例公开了一种智能网联客车电机制动扭矩计算系统;
[0086]
如图2所示,一种智能网联客车电机制动扭矩计算系统,包括模糊处理模块、参数
计算模块、状态判断模块和扭矩计算模块:
[0087]
模糊处理模块,被配置为:对整车控制器激活后获取的制动踏板开度进行模糊处理;
[0088]
参数计算模块,被配置为:根据模糊处理后的制动踏板开度,计算制动系数和电机转速最优值;
[0089]
状态判断模块,被配置为:实时采集车辆电机转速,判断制动扭矩的滞环状态;
[0090]
扭矩计算模块,被配置为:基于滞环状态、制动系数和电机转速最优值,计算得到最终电机制动扭矩。
[0091]
实施例三
[0092]
本实施例的目的是提供计算机可读存储介质。
[0093]
计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本公开实施例1所述的一种智能网联客车电机制动扭矩计算方法中的步骤。
[0094]
实施例四
[0095]
本实施例的目的是提供电子设备。
[0096]
电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的程序,所述处理器执行所述程序时实现如本公开实施例1所述的一种智能网联客车电机制动扭矩计算方法中的步骤。
[0097]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1