一种混合动力系统的控制方法与流程
1.本发明属于包含有行星机构的混合动力系统控制的技术领域,具体涉及一种混合动力系统的控制方法。
背景技术:
2.混合动力车辆可以控制发动机大部分时间都工作在高效区,具有节能减排的显著特点,但现有的使用单行星排式动力耦合系统的混合动力车辆多以当前soc状态和整车需求功率来切换车辆混动和纯电的工作模式,较少考虑到运行道路情况对能量管理策略的影响。
3.当车辆行驶在较为拥堵的路段时,因频繁踩踏加速和制动踏板,整车需求功率波变化较快,易出现发动机频繁启停的情况,对发动机寿命有一定影响,且发动机启动阶段属于开环控制,喷油浓,耗油量较大。
4.因现有技术缺少对运行路况的判断,面对复杂的道路路面情况,依靠现有的控制变量,运用简单的逻辑门限判断无法对行星排能耗做出进一步的控制优化。
技术实现要素:
5.为解决上述现有技术中存在的缺陷与不足,本发明提供一种混合动力系统的控制方法。
6.为实现上述目的,本发明提供如下技术方案:
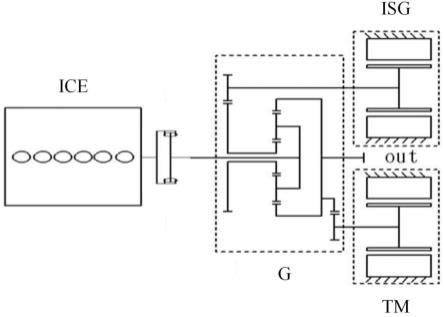
7.一种混合动力系统的控制方法,所述混合动力系统包括发动机ice、驱动电机tm、发电机isg和行星机构g;其中发动机ice连接行星机构的行星架端,发电机isg连接行星机构的太阳轮,驱动电机tm连接行星机构的齿圈,其中发动机ice由发电机isg拖动启动;
8.其特征在于:包括以下步骤:设置soc的最低门限值为soc
min
,最高门限值为soc
max
,判断当前整车电池soc值:
9.1)当前整车电池soc值低于soc
min
时,发动机不停机系统强制进入充电模式;
10.2)当前整车电池soc值达到soc
max
时,系统处于纯电模式;
11.3)当前整车电池soc值大于等于soc
min
且小于等于soc
max
时,根据整车需求功率和当前加权车速确定发动机的启停。
12.作为本发明的进一步优选实施方式,所述步骤3)中,
13.整车需求功率根据以下方程确定:
14.p
req
=pj+pf+pwꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
15.其中,
16.p
req
为整车需求功率;
17.pj为加速功率,
18.pf为滚动阻力功率,
19.pw为空气阻力功率,
20.cd、a、f、δ分别为空气阻力系数、汽车迎风面积、汽车滚动阻力系数和汽车旋转质量换算系数;v是当前车速;m是整车总质量。
21.作为本发明的进一步优选实施方式,所述步骤3)中,
22.当前加权车速为:
[0023]va
=c
1v1
+c
2v2
+c
3v3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0024]
对比加权车速为:
[0025]vb
=c
4v1
+c
5v2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0026]
其中,
[0027]v1
为车辆在一段时间t1的平均车速,平均车速v1每隔一段时间t1更新一次;
[0028]v2
为车辆在运行时间t内的平均车速;
[0029]v3
为车辆t时刻的瞬时车速,v2和v3实时更新;
[0030]
c1、c2、c3、c4、c5为车速加权系数,且满足c1≥c2≥c3且c1+c2+c3=1,c4≥c5且c4+c5=1。
[0031]
作为本发明的进一步优选实施方式,一段时间t1和车速加权系数c的取值需满足整车电池的动态平衡,保证车辆在整个行驶过程中整车电池soc值大于等于soc
min
且小于等于soc
max
,
[0032]
整个行驶过程中电池的充放电量为:
[0033]
q=∑i*r/3600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0034]
其中,q为电池的充放电量,r为电池的内阻,i为电池的电流,且满足
[0035]
i=i
tm
+i
isg
+irꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0036]
其中,i
tm
为驱动电机的电流,i
isg
为发电机的电流,ir为整车附件的电流。
[0037]
车辆在整个行驶过程中维持整车电池动态平衡需满足q≈0。
[0038]
作为本发明的进一步优选实施方式,c1=0.6;c2=0.3;c3=0.1;c4=0.8;c5=0.2。
[0039]
作为本发明的进一步优选实施方式,整个车辆工作模式的切换过程包括:
[0040]
当前整车电池soc值在soc
min
~soc
max
之间时,并满足整车需求功率≥p1且va≥vb时,发动机启动进入混合动力模式,与驱动电机共同对外输出动力,同时发动机带动发电机工作,给发电机充电;
[0041]
混合动力模式下,当整车需求功率p
req
≤p2且va≤vb时,发动机停机进入纯电模式;减速制动工况或整车需求功率小于预设阈值时,此时驱动电机输出满足需求,
[0042]
混合动力模式下,当整车需求功率p
req
≤p2且va>vb时,控制混合动力行星排工作在怠速工况下,同时令发电机同步跟随转动不发电,只有当va≤vb时,控制发动机停机;
[0043]
其中,p1和p2为试验标定值,需满足电池soc动态平衡。
[0044]
与现有技术相比,本发明能够实现的有益效果包括:
[0045]
1)本发明提供一种基于路况识别的混合动力系统的控制方法,通过对车辆行驶工况的判断,调整整车控制策略,减少发动机的频繁启动和关闭,达到燃油消耗最小和减少污染排放的目的。
[0046]
2)本发明提供一种基于路况识别的混合动力系统的控制方法,切换为新的工作模式后,因有功率切换延迟δp=p
1-p2,且在此基础上新增了加权车速控制变量,避免了车辆因暂时加减速而导致的工作模式切换,保证模式切换过程的稳定性。
[0047]
3)本发明提供一种基于路况识别的混合动力系统的控制方法,有效减少了车辆工作模式循环往复的次数,延长发动机的使用寿命,也确保了乘员较好的驾驶性。
附图说明
[0048]
图1为本发明混合动力系统的结构示意图;
[0049]
图2为本发明未增加权车速控制变量前发动机的启停状况图;
[0050]
图3为本发明求得的当前加权车速和对比加权车速随运行时间变化图;
[0051]
图4为本发明新增加权车速控制变量后发动机的启停状况图。
具体实施方式
[0052]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0053]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0054]
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0055]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0056]
[实施例1]
[0057]
如图1所示为本发明实施例1提供的一种混合动力系统的控制方法,所述混合动力系统包括发动机ice、驱动电机tm、发电机isg和行星机构g;其中发动机ice连接行星机构的行星架端,发电机isg连接行星机构的太阳轮,驱动电机tm连接行星机构的齿圈,其中发动机ice由发电机isg拖动启动;
[0058]
当前整车电池soc值的状态、整车需求功率和当前加权车速共同决定了车辆行驶工作模式:所述控制方法包括以下步骤:设置soc的最低门限值为soc
min
,最高门限值为soc
max
,判断当前整车电池soc值:
[0059]
1)当前整车电池soc值低于soc
min
时,发动机不停机系统强制进入充电模式;
[0060]
2)当前整车电池soc值达到soc
max
时,系统处于纯电模式;
[0061]
3)当前整车电池soc值大于等于soc
min
且小于等于soc
max
时,根据整车需求功率和当前加权车速确定发动机的启停。
[0062]
在该步骤3)中
[0063]
整车需求功率根据以下方程确定:
[0064]
p
req
=pj+pf+pwꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0065]
其中,
[0066]
p
req
为整车需求功率;
[0067]
pj为加速功率,
[0068]
pf为滚动阻力功率,
[0069]
pw为空气阻力功率,
[0070]cd
、a、f、δ分别为空气阻力系数、汽车迎风面积、汽车滚动阻力系数和汽车旋转质量换算系数;v是当前车速;m是整车总质量。
[0071]
在该步骤3)中,
[0072]
当前加权车速为:
[0073]va
=c
1v1
+c
2v2
+c
3v3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0074]
对比加权车速为:
[0075]vb
=c
4v1
+c
5v2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0076]
其中,
[0077]va
代表了对车辆此时行驶状况的判断;
[0078]vb
代表了对车辆在截取时间段内行驶路况的判断;
[0079]v1
为车辆在一段时间t1的平均车速,平均车速v1每隔一段时间t1更新一次;
[0080]v2
为车辆在运行时间t内的平均车速;
[0081]v3
为车辆t时刻的瞬时车速,v2和v3实时更新;
[0082]
c1、c2、c3、c4、c5为车速加权系数,且满足c1≥c2≥c3且c1+c2+c3=1,c4≥c5且c4+c5=1。
[0083]
在计算当前加权车速和对比加权车速时,
[0084]
一段时间t1和车速加权系数c的取值需满足整车电池的动态平衡,保证车辆在整个行驶过程中整车电池soc值大于等于soc
min
且小于等于soc
max
,
[0085]
整个形式过程中电池的充放电量为:
[0086]
q=∑i*r/3600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0087]
其中,q为电池的充放电量,r为电池的内阻,i为电池的电流,且满足
[0088]
i=i
tm
+i
isg
+irꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0089]
其中,i
tm
为驱动电机的电流,i
isg
为发电机的电流,ir为整车附件的电流。
[0090]
车辆在整个行驶过程中维持整车电池动态平衡需满足q≈0。
[0091]
作为本实施例的其中一种优选实施例,c1=0.6;c2=0.3;c3=0.1;c4=0.8;c5=0.2;本领域技术人员知晓,根据实际使用的需要,也可以将车速加权系数c设置为其他符合条件的具体数值。
[0092]
如图3所示,在标准运行ccbc工况下,横坐标表示运行时间t,纵坐标分别求得的当前加权车速va和对比加权车速vb。
[0093]
整个车辆工作模式的切换过程包括:
[0094]
当前整车电池soc值在soc
min
~soc
max
之间时,并满足整车需求功率≥p1且va≥vb时,发动机启动进入混合动力模式,与驱动电机共同对外输出动力,同时发动机带动发电机工作,给发电机充电;
[0095]
混合动力模式下,当整车需求功率p
req
≤p2且va≤vb时,发动机停机进入纯电模式;减速制动工况或整车需求功率小于预设阈值时,此时驱动电机输出满足需求,
[0096]
混合动力模式下,当整车需求功率p
req
≤p2且va>vb时,控制混合动力行星排工作在怠速工况下,同时令发电机同步跟随转动不发电,只有当va≤vb时,控制发动机停机;
[0097]
其中,p1和p2为试验标定值,需满足电池soc动态平衡。
[0098]
如图2所示为未增加权车速控制变量前发动机的启停状况(标志1代表启机),如图4所示为新增加权车速控制变量后发动机的启停状况(标志1代表启机),从图4与图2的对比可以明显看出,此种方式有效避免了车辆因暂时加减速而导致的工作模式切换,保证模式切换过程的稳定性。
[0099]
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1