1.本发明属于智能汽车技术领域,尤其是涉及一种基于自抗扰的人机共驾车速控制方法及系统。
背景技术:2.随着社会经济飞速发展,人民生活水平不断提高,汽车成为日常生活中的必需品。而汽车保有量的不断增加,也引发了交通拥堵,交通事故增加等问题。智能汽车作为提高日常交通通行效率和安全性的关键解决方案,自然成为了现代汽车工业的研究重点。
3.目前,无论在高级别自动驾驶或者目前已普遍落地应用的辅助驾驶解决方案中,车速自动控制都是其中不可或缺且极为关键的一环,已落地的车速自动控制解决方案包括车速直接闭环pid控制,增量式pid控制,以及加速度开环速度闭环pid控制等。
4.作为工业领域应用最为广泛的控制方法,pid控制凭借其简单的结构,丰富的调参方法在传统车速控制中被大量使用。但是其自身固有的缺陷也带来了鲁棒性差,容易出现饱和等问题。更重要的是pid这种基于误差的反馈来消除误差的方法,其控制输出往往滞后于扰动,即扰动(例如车辆载重变化或者道路坡度变化等)已经带来了影响再去消除它。为了更好得抵抗干扰,工程师往往选择增大pid中的比例参数,而这又可能引起系统震荡。
技术实现要素:5.针对上述问题,本发明提出了一种基于自抗扰的人机共驾车速控制方法及系统,针对智能汽车车速控制过程中的扰动问题,通过扰动观测器在干扰出现的初期快速进行补偿,从而提升车速控制系统的抗干扰能力,实现人机共驾车速控制。
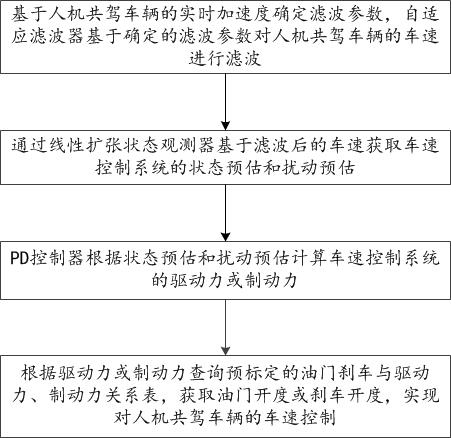
6.为实现上述目的,本发明公开了一种基于自抗扰的人机共驾车速控制方法,包括:基于人机共驾车辆的实时加速度确定滤波参数,自适应滤波器基于确定的所述滤波参数对人机共驾车辆的车速进行滤波;通过线性扩张状态观测器基于滤波后的车速获取车速控制系统的状态预估和扰动预估;pd控制器根据所述状态预估和扰动预估计算所述车速控制系统的驱动力或制动力;根据所述驱动力或制动力查询预标定的油门刹车与驱动力、制动力关系表,获取油门开度或刹车开度,实现对人机共驾车辆的车速控制。
7.作为本发明的进一步改进,所述基于人机共驾车辆的实时加速度确定滤波参数,包括:当所述加速度的绝对值大于0.5m/s2时,滤波参数取值为0.3;当所述加速度的绝对值小于或等于0.5m/s2时,滤波参数取值为0.05;自适应滤波器基于确定的所述滤波参数对人机共驾车辆的车速进行滤波,公式为:
其中,ya表示当前时刻的车速滤波值;ya_old表示上一时刻的车速滤波值;xa表示当前时刻的车速测量值;表示滤波参数。
8.作为本发明的进一步改进,所述通过线性扩张状态观测器获取车速控制系统的状态预估和扰动预估;包括:假设车速控制系统模型为积分串联标准型,将所述车速控制系统的实际模型与积分串联标准型之间的误差视作内扰,建立所述车速控制系统的线性扩张状态方程为:其中,表示车速控制系统状态的微分;x表示车速控制系统当前时刻的状态,x=[x1 x2 x3]
t
,x1为当前时刻的车速,x2为当前时刻的加速度,x3为扩张状态,即当前时刻的总扰动;表示车速控制系统总扰动的微分;u表示当前时刻输入人机共驾车辆的驱动力或制动力;y表示当前时刻人机共驾车辆输出的车速;a、b、e、c均为系统参数,且:其中,b0 为人机共驾车辆整车质量的倒数;对应得到所述线性扩张状态观测器的特征方程为:其中,表示车速控制系统状态预估的微分;z表示车速控制系统当前时刻的状态预估,z=[z1 z2 z3]
t
,z1为当前时刻的车速预估,z2为当前时刻的加速度预估,z3为当前时刻的总扰动预估;u表示当前时刻输入人机共驾车辆的驱动力或制动力;l表示线性扩张状态观测器的反馈增益矩阵;表示当前时刻人机共驾车辆输出车速的预估值。
[0009]
作为本发明的进一步改进,
将所述线性扩张状态观测器的特征方程的极点设置在同一位置-w0处,简化所述线性扩张状态观测器的调参,得到矩阵l的取值为:l=[3w0 3w0
2 w0
3 ]
t
其中,w0表示线性扩张状态观测器的带宽。
[0010]
作为本发明的进一步改进,所述pd控制器根据所述状态预估和扰动预估计算所述车速控制系统的驱动力或制动力;包括:先根据所述车速控制系统接收上游规划模块输入的目标车速和目标加速度,基于pd控制、所述目标车速、所述目标加速度和所述状态预估,计算输入车辆的基础驱动力或制动力,公式为:其中,u0表示下一时刻输入人机共驾车辆的基础驱动力或制动力;vr、分别表示目标车速和目标加速度;p、d分别表示比例系数和微分系数;z1、z2分别为当前时刻的车速预估和当前时刻的加速度预估,z1、z2共同组成状态预估;再根据下一时刻输入人机共驾车辆的所述基础驱动力或制动力,结合所述扰动预估,计算下一时刻输入人机共驾车辆的最终驱动力或制动力,公式为:u1=(u0-z3)/b0其中,u1表示下一时刻输入人机共驾车辆的最终驱动力或制动力;z3为当前时刻的总扰动预估;b0为人机共驾车辆整车质量的倒数。
[0011]
本发明还提供了一种基于自抗扰的人机共驾车速控制系统,包括:自适应滤波器、线性扩张状态观测器、pd控制器及油门刹车与驱动力、制动力关系表;所述自适应滤波器,用于:基于人机共驾车辆的实时加速度确定滤波参数;基于确定的所述滤波参数对人机共驾车辆的车速进行滤波;所述线性扩张状态观测器,用于:基于滤波后的车速获取车速控制系统的状态预估和扰动预估;所述pd控制器,用于:根据所述状态预估和扰动预估计算所述车速控制系统的驱动力或制动力;所述油门刹车与驱动力、制动力关系表,用于:根据计算得到的所述驱动力或制动力查询所述油门刹车与驱动力、制动力关系表,获取油门开度或刹车开度,实现对人机共驾车辆的车速控制。
[0012]
作为本发明的进一步改进,所述基于人机共驾车辆的实时加速度确定滤波参数,包括:
当所述加速度的绝对值大于0.5m/s2时,滤波参数取值为0.3;当所述加速度的绝对值小于或等于0.5m/s2时,滤波参数取值为0.05;自适应滤波器基于确定的所述滤波参数对人机共驾车辆的车速进行滤波,公式为:其中,ya表示当前时刻的车速滤波值;ya_old表示上一时刻的车速滤波值;xa表示当前时刻的车速测量值;表示滤波参数。
[0013]
作为本发明的进一步改进,基于滤波后的车速获取车速控制系统的状态预估和扰动预估;包括:假设车速控制系统模型为积分串联标准型,将所述车速控制系统的实际模型与积分串联标准型之间的误差视作内扰,建立所述车速控制系统的线性扩张状态方程为:其中,表示车速控制系统状态的微分;x表示车速控制系统当前时刻的状态,x=[x1 x2 x3]
t
,x1为当前时刻的车速,x2为当前时刻的加速度,x3为扩张状态,即当前时刻的总扰动;表示车速控制系统总扰动的微分;u表示当前时刻输入人机共驾车辆的驱动力或制动力;y表示当前时刻人机共驾车辆输出的车速;a、b、e、c均为系统参数,且:其中,b0 为人机共驾车辆整车质量的倒数;对应得到所述线性扩张状态观测器的特征方程为:其中,表示车速控制系统状态预估的微分;z表示车速控制系统当前时刻的状态预估,z=[z1 z2 z3]
t
,z1为当前时刻的车速预估,z2为当前时刻的加速度预估,z3为当前时刻的总扰动预估;u表示当前时刻输入人机共驾车辆的驱动力或制动力;
l表示线性扩张状态观测器的反馈增益矩阵;表示当前时刻人机共驾车辆输出车速的预估值。
[0014]
作为本发明的进一步改进,将所述线性扩张状态观测器的特征方程中的极点设置在同一位置-w0处,简化所述线性扩张状态观测器的调参,得到矩阵l的取值为:l=[3w0 3w0
2 w0
3 ]
t
其中,w0表示线性扩张状态观测器的带宽。
[0015]
作为本发明的进一步改进,所述pd控制器根据所述状态预估和扰动预估计算所述车速控制系统的驱动力或制动力,包括:先根据所述车速控制系统接收上游规划模块输入的目标车速和目标加速度,基于pd控制、所述目标车速、所述目标加速度和所述状态预估,计算输入车辆的基础驱动力或制动力,公式为:其中,u0表示下一时刻输入人机共驾车辆的基础驱动力或制动力;vr、分别表示目标车速和目标加速度;p、d分别表示比例系数和微分系数;z1、z2分别为当前时刻的车速预估和当前时刻的加速度预估,z1、z2共同组成状态预估;再根据下一时刻输入人机共驾车辆的所述基础驱动力或制动力,结合所述扰动预估,计算下一时刻输入人机共驾车辆的最终驱动力或制动力,公式为:u1=(u0-z3)/b0其中,u1表示下一时刻输入人机共驾车辆的最终驱动力或制动力;z3为当前时刻的总扰动预估;b0为人机共驾车辆整车质量的倒数。
[0016]
与现有技术相比,本发明的有益效果为:本发明不需要提前预知系统的精确数学模型,而是假设其模型为积分串联型,将实际模型与积分串联型之间的差异视作内扰(如传动能量损失,车辆载重变化等),并将其他外部干扰作为外扰(如风力变化,坡度变化,路面附着率变化等),通过预估内扰与外扰的总和,并通过pd控制快速补偿来提升车速控制过程的抗干扰能力,不同于现有的pid控制,基于误差的反馈来消除误差的方法,控制输出往往滞后于扰动,即扰动(例如车辆载重变化或者道路坡度变化等)已经带来了影响再去消除它,且为了更好得抵抗干扰,工程师往往选择增大pid中的比例参数,进而可能引起系统震荡;本发明通过pd控制,在扰动出现的初期快速进行补偿,从而提升车速控制系统的抗干扰能力。
[0017]
本发明根据实际采集的车速曲线分析出其数据匀速阶段受噪声影响更明显的特性,提出不同加速度使用不同的滤波系数,即采用自适应滤波器,从而实现滤波器既能快速
跟踪输入信号又能有效平滑输入信号的目的,使线性扩张观测器免于噪声干扰,避免系统失稳。
[0018]
本发明对于车辆载重变化,或道路坡度变化都能很好地预估干扰,并能够快速响应从而抵消其干扰效果,从而实现更加精准的车速控制。
附图说明
[0019]
图1为本发明一种实施例公开的基于自抗扰的人机共驾车速控制方法流程图;图2为本发明一种实施例公开的基于自抗扰的人机共驾车速控制系统示意图;图3为本发明一种实施例公开的车辆受到正弦波外扰时,采用pid控制和本发明的自抗扰控制系统下,车速调整过程对比图;图4为本发明一种实施例公开的车速信号采用不同滤波系数及自适应滤波的对比图。
具体实施方式
[0020]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0021]
下面结合附图对本发明做进一步的详细描述:如图1所示,本发明公开的一种基于自抗扰的人机共驾车速控制方法,包括:(1)基于人机共驾车辆的实时加速度确定滤波参数,自适应滤波器基于确定的滤波参数对人机共驾车辆的车速进行滤波;其中,由于扩张状态观测器的特性,扩张状态观测器的带宽w0越大,对车速控制系统的状态预估及扰动预估就越快,这虽然有利于快速补偿扭矩,使车速平稳,但是w0过大也会使得扩张状态观测器对车速控制系统的噪声和测量噪声都更加敏感,从而导致系统失稳。因此,在将人机共驾车辆获取的车速输入扩张状态观测器前需要经过滤波。
[0022]
进一步的,一般的一阶惯性滤波器为上一时刻滤波值与当前时刻测量值的加权平均,即:其中,y0表示当前时刻的滤波值;y0_old表示上一时刻滤波值;x0表示当前时刻测量值;表示滤波参数;通过公式可知,滤波参数越大,滤波器的跟踪效果越好,但平滑效果会越差;而滤波参数越小,输出的车速曲线越平滑,但跟踪效果会变差。
[0023]
如图4所示,通过观察实车车速曲线发现,噪声的影响主要存在于匀速阶段,基于此,采用自适应滤波器,即:当车辆加速度绝对值大于0.5m/s2时,滤波参数取较大值0.3,反之取0.05,这样就实现了滤波器既能快速跟踪输入信号又能有效平滑输入信号。
[0024]
具体的:本发明中,基于人机共驾车辆的实时加速度确定滤波参数,包括:
当加速度的绝对值大于0.5m/s2时,滤波参数取值为0.3;当加速度的绝对值小于或等于0.5m/s2时,滤波参数取值为0.05;本发明中,自适应滤波器基于确定的滤波参数对人机共驾车辆的车速进行滤波,公式为:其中,ya表示当前时刻的车速滤波值;ya_old表示上一时刻的车速滤波值;xa表示当前时刻的车速测量值;表示滤波参数。
[0025]
(2)通过线性扩张状态观测器基于滤波后的车速获取车速控制系统的状态预估和扰动预估;其中,包括:假设车速控制系统模型为积分串联标准型,将车速控制系统的实际模型与积分串联标准型之间的误差视作内扰,建立车速控制系统的线性扩张状态方程为:其中,表示车速控制系统状态的微分;x表示车速控制系统当前时刻的状态,x=[x1 x2 x3]
t
,x1为当前时刻的车速,x2为当前时刻的加速度,x3为扩张状态,即当前时刻的总扰动;表示车速控制系统总扰动的微分;u表示当前时刻输入人机共驾车辆的驱动力或制动力;y表示当前时刻人机共驾车辆输出的车速;a、b、e、c均为系统参数,且:其中,b0 为人机共驾车辆整车质量的倒数;对应得到所述线性扩张状态观测器的特征方程为:其中,表示车速控制系统状态预估的微分;z表示车速控制系统当前时刻的状态预估,z=[z1 z2 z3]
t
,z1为当前时刻的车速预估,z2为当前时刻的加速度预估,z3为当前时刻的总扰动预估;u表示当前时刻输入人机共驾车辆的驱动力或制动力;l表示线性扩张状态观测器的反馈增益矩阵;表示当前时刻人机共驾车辆输出车速的预估值。
[0026]
进一步的,将线性扩张状态观测器的特征方程中的极点设置在同一位置-w0处,简化线性扩张状态观测器的调参,得到矩阵l的取值为:l=[3w0 3w0
2 w0
3 ]
t
其中,w0表示线性扩张状态观测器的带宽。
[0027]
(3)pd控制器根据状态预估和扰动预估计算车速控制系统的驱动力或制动力;其中,包括:先根据车速控制系统接收上游规划模块输入的目标车速和目标加速度,基于pd控制、目标车速、目标加速度和状态预估,计算输入车辆的基础驱动力或制动力,公式为:其中,u0表示下一时刻输入人机共驾车辆的基础驱动力或制动力;vr、分别表示目标车速和目标加速度;p、d分别表示比例系数和微分系数;z1、z2分别为当前时刻的车速预估和当前时刻的加速度预估,z1、z2共同组成状态预估;再根据下一时刻输入人机共驾车辆的所述基础驱动力或制动力,结合所述扰动预估,计算下一时刻输入人机共驾车辆的最终驱动力或制动力,公式为:u1=(u0-z3)/b0其中,u1表示下一时刻输入人机共驾车辆的最终驱动力或制动力;z3为当前时刻的总扰动预估;b0为人机共驾车辆整车质量的倒数。
[0028]
(4)根据驱动力或制动力查询预标定的油门刹车与驱动力、制动力关系表(即驱/制动力标定表),获取油门开度或刹车开度,实现对人机共驾车辆的车速控制。
[0029]
如图2所示,本发明还提供了一种基于自抗扰的人机共驾车速控制系统,包括:线性扩张状态观测器、pd控制器及驱动力/制动力标定表;(1)自适应滤波器,用于:对人机共驾车辆的车速进行滤波;其中,由于扩张状态观测器的特性,扩张状态观测器的带宽w0越大,对车速控制系统的状态预估及扰动预估就越快,这虽然有利于快速补偿扭矩,使车速平稳,但是w0过大也会使得扩张状态观测器对车速控制系统的噪声和测量噪声都更加敏感,从而导致系统失稳。因此,在将人机共驾车辆获取的车速输入扩张状态观测器前需要经过滤波。
[0030]
进一步的,一般的一阶惯性滤波器为上一时刻滤波值与当前时刻测量值的加权平均,即:
其中,y0表示当前时刻的滤波值;y0_old表示上一时刻滤波值;x0表示当前时刻测量值;表示滤波参数;通过公式可知,滤波参数越大,滤波器的跟踪效果越好,但平滑效果会越差;而滤波参数越小,输出的车速曲线越平滑,但跟踪效果会变差。
[0031]
通过观察实车车速曲线发现,噪声的影响主要存在于匀速阶段,基于此,采用自适应滤波器,即:当车辆加速度绝对值大于0.5m/s2时,滤波参数取较大值0.3,反之取0.05,这样就实现了滤波器既能快速跟踪输入信号又能有效平滑输入信号。
[0032]
具体的:本发明中,基于人机共驾车辆的实时加速度确定滤波参数,包括:当加速度的绝对值大于0.5m/s2时,滤波参数取值为0.3;当加速度的绝对值小于或等于0.5m/s2时,滤波参数取值为0.05;本发明中,自适应滤波器基于确定的滤波参数对人机共驾车辆的车速进行滤波,公式为:其中,ya表示当前时刻的车速滤波值;ya_old表示上一时刻的车速滤波值;xa表示当前时刻的车速测量值;表示滤波参数。
[0033]
(2)线性扩张状态观测器,用于:基于滤波后的车速获取车速控制系统的状态预估和扰动预估;其中,包括:假设车速控制系统模型为积分串联标准型,将车速控制系统的实际模型与积分串联标准型之间的误差视作内扰,建立车速控制系统的线性扩张状态方程为:其中,表示车速控制系统状态的微分;x表示车速控制系统当前时刻的状态,x=[x1 x2 x3]
t
,x1为当前时刻的车速,x2为当前时刻的加速度,x3为扩张状态,即当前时刻的总扰动;表示车速控制系统总扰动的微分;u表示当前时刻输入人机共驾车辆的驱动力或制动力;y表示当前时刻人机共驾车辆输出的车速;a、b、e、c均为系统参数,且:其中,b0 为人机共驾车辆整车质量的倒数;对应得到所述线性扩张状态观测器的特征方程为:
其中,表示车速控制系统状态预估的微分;z表示车速控制系统当前时刻的状态预估,z=[z1 z2 z3]
t
,z1为当前时刻的车速预估,z2为当前时刻的加速度预估,z3为当前时刻的总扰动预估;u表示当前时刻输入人机共驾车辆的驱动力或制动力;l表示线性扩张状态观测器的反馈增益矩阵;表示当前时刻人机共驾车辆输出车速的预估值。
[0034]
进一步的,将线性扩张状态观测器的特征方程中的极点设置在同一位置-w0处,简化线性扩张状态观测器的调参,得到矩阵l的取值为:l=[3w0 3w0
2 w0
3 ]
t
其中,w0表示线性扩张状态观测器的带宽。
[0035]
(3)pd控制器,用于:将比例系数、微分时间常数与pd控制器带宽相联系,简化pd控制器的标定;根据状态预估和扰动预估计算车速控制系统的驱动力或制动力;其中,包括:先根据车速控制系统接收上游规划模块输入的目标车速和目标加速度,基于pd控制、目标车速、目标加速度和状态预估,计算输入车辆的基础驱动力或制动力,公式为:其中,u0表示下一时刻输入人机共驾车辆的基础驱动力或制动力;vr、分别表示目标车速和目标加速度;p、d分别表示比例系数和微分系数;z1、z2分别为当前时刻的车速预估和当前时刻的加速度预估,z1、z2共同组成状态预估;再根据下一时刻输入人机共驾车辆的所述基础驱动力或制动力,结合所述扰动预估,计算下一时刻输入人机共驾车辆的最终驱动力或制动力,公式为:u1=(u0-z3)/b0其中,u1表示下一时刻输入人机共驾车辆的最终驱动力或制动力;z3为当前时刻的总扰动预估;b0为人机共驾车辆整车质量的倒数。
[0036]
(4)油门刹车与驱动力、制动力关系表,用于:根据计算得到的驱动力或制动力查询预标定的油门刹车与驱动力、制动力关系表,获取油门开度或刹车开度,实现对人机共驾车辆的车速控制。
[0037]
实施例1:在matlab/simulink中搭建仿真,假设车辆重量为1.5吨,以车速10m/s正常行驶,在仿真200秒时加入正弦波形式的干扰驱动力来模拟车辆连续上下坡,假设坡度值为5
°
,则干扰驱动力为15000
×
sin(5/180
×
3.14)≈1307n。
[0038]
如图3所示,为使用pid控制和自抗扰控制的车速对比图(波峰和波谷高度差较大的曲线为pid控制过程曲线,波峰和波谷高度差较小的曲线为本发明自抗扰控制过程曲线),其中pid的比例参数和自抗扰中pd部分的比例参数相同(均为1000);由图3中结果可见,正弦扰动发生后,使用pid控制器的系统车速随扰动而变化,其车速变化峰值约为
±
2m/s;而使用本发明自抗扰控制器的系统车速仅在扰动发生时刻上升至11m/s左右,且能将车速稳定控制在目标车速
±
0.5m/s范围内。
[0039]
由此可见,本发明自抗扰控制器可以提升车速系统的抗干扰能力。
[0040]
实施例2:根据实车采集的车速进行滤波,对比不同滤波参数的一阶惯性滤波以及基于加速度的自适应滤波效果。
[0041]
图4中可以看出,与滤波前车速信号相比,滤波参数为0.3的滤波信号跟踪性强,但平滑作用小;滤波参数为0.05的滤波信号平滑性较好,但跟踪性差;而本发明采用的基于加速度的自适应滤波的滤波信号,既能在车速变化时快速跟踪车速信号又能在车速稳定时有效平滑车速信号。
[0042]
本发明的优点:本发明不需要提前预知系统的精确数学模型,而是假设其模型为积分串联型,将实际模型与积分串联型之间的差异视作内扰(如传动能量损失,车辆载重变化等),并将其他外部干扰作为外扰(如风力变化,坡度变化,路面附着率变化等),通过预估内扰与外扰的总和,并通过pd控制快速补偿来提升车速控制过程的抗干扰能力,不同于现有的pid控制,基于误差的反馈来消除误差的方法,控制输出往往滞后于扰动,即扰动(例如车辆载重变化或者道路坡度变化等)已经带来了影响再去消除它,且为了更好得抵抗干扰,工程师往往选择增大pid中的比例参数,进而可能引起系统震荡;本发明通过pd控制,在扰动出现的初期快速进行补偿,从而提升车速控制系统的抗干扰能力。
[0043]
本发明根据实际采集的车速曲线分析出其数据匀速阶段受噪声影响更明显的特性,提出不同加速度使用不同的滤波系数,即采用自适应滤波器,从而实现滤波器既能快速跟踪输入信号又能有效平滑输入信号的目的,使线性扩张观测器免于噪声干扰,避免系统失稳。
[0044]
本发明对于车辆载重变化,或道路坡度变化都能很好地预估干扰,并能够快速响应从而抵消其干扰效果,从而实现更加精准的车速控制。
[0045]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。