一种车辆目标跟踪的方法及装置与流程
本技术涉及自动驾驶,具体涉及一种车辆目标跟踪的方法及装置。
背景技术:
1、随着自动驾驶技术的不断发展,智能驾驶系统需要面对的场景也越来越多。跟车功能是智能驾驶系统重要的功能之一。跟车功能启用时,本车跟随跟车目标的轨迹与速度进行自动驾驶。因此,跟车目标选择方法的合理性和有效性会直接影响到智能驾驶系统的安全性和舒适性。
2、当前智能驾驶系统中广泛应用的跟车目标选择方法,根据车道线信息和车辆位置,筛选出位于当前车道内的目标车辆作为跟车目标。但是,在车辆配置自主变道功能时,该方法存在跟车目标切换不及时的问题,安全性和舒适性较差。另外,现有技术通过目标车辆的运动状态进行预测,识别相邻车道目标车辆的切入,但存在识别效果不好或者误识别较多的问题。
技术实现思路
1、有鉴于此,本技术提供一种车辆目标跟踪的方法及装置,能够获得更合理的跟车目标信息,提高智能驾驶系统的安全性和舒适性。
2、为解决上述问题,本技术提供的技术方案如下:
3、在本技术提供一种车辆目标跟踪的方法,该方法包括:
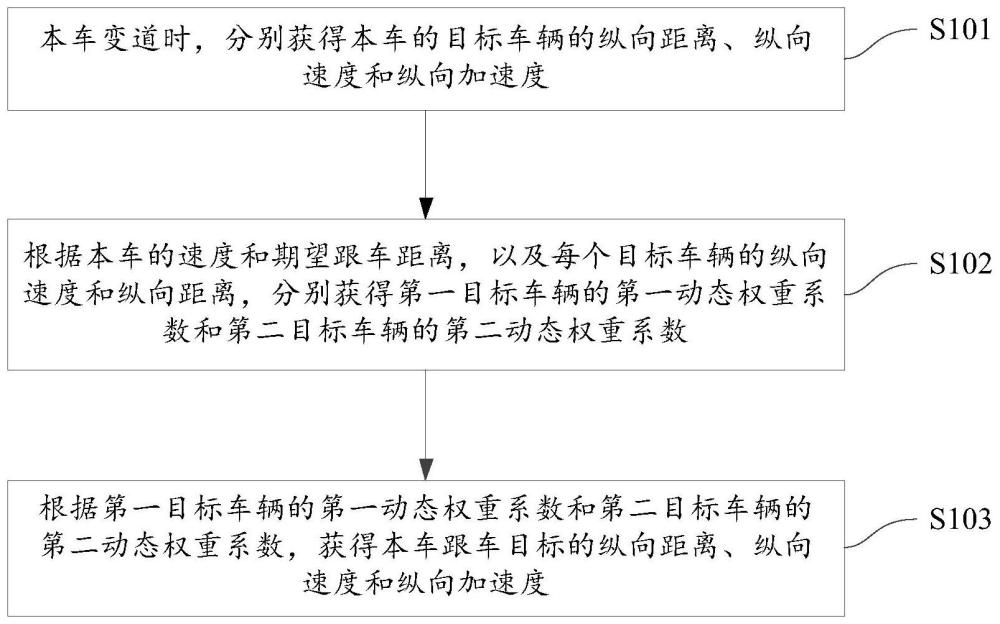
4、本车变道时,分别获得本车的目标车辆的纵向距离、纵向速度和纵向加速度;目标车辆包括本车前方的第一目标车辆和本车变道方向对应的左前方或右前方的第二目标车辆;本车左变道时,第二目标车辆为左前方的车辆,本车右变道时,第二目标车辆为右前方的车辆;
5、根据本车的速度和期望跟车距离,以及每个目标车辆的纵向速度和纵向距离,分别获得第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数;
6、根据第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数,获得本车跟车目标的纵向距离、纵向速度和纵向加速度。
7、优选地,根据本车的速度和期望跟车距离,以及每个目标车辆的纵向速度和纵向距离,分别获得第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数,包括:
8、根据本车的速度和期望跟车距离,以及每个目标车辆的纵向速度和纵向距离,获得每个目标车辆的危险度系数;
9、根据每个目标车辆的危险度系数和本车的变道状态,分别获得第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数;
10、其中,变道状态包括:持续横向运动、较慢横向运动和非变道过程;本车与本车所在车道的车道线距离变化速度大于等于预设速度时,本车处于持续横向运动;本车与本车所在车道的车道线距离变化速度小于预设速度时,本车处于较慢横向运动。
11、优选地,根据每个目标车辆的危险度系数和本车的变道状态,分别获得第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数,包括:
12、根据每个目标车辆的危险度系数,获得第二目标车辆的起始权重、终止权重、权重增长速度和权重降低速度;
13、根据第二目标车辆的起始权重终止权重、权重增长速度、权重降低速度和本车的变道状态,获得第二目标车辆的第二动态权重系数;
14、根据第二目标车辆的第二动态权重系数,获得第一目标车辆的第一动态权重系数。
15、优选地,根据第二目标车辆的起始权重终止权重、权重增长速度、权重降低速度和本车的变道状态,获得第二目标车辆的第二动态权重系数,包括:
16、当本车持续横向运动时,第二目标车辆的第二动态权重系数,从起始权重开始,按照权重增长速度增加,直至终止权重;
17、当本车较慢横向运动时,第二目标车辆的第二动态权重系数从当前值,按照权重降低速度降低,直至起始权重;
18、当本车不再处于变道过程时,第二目标车辆的第二动态权重系数为0。
19、优选地,获得第二目标车辆的第二动态权重系数,包括:
20、根据每个目标车辆的危险度系数,获得第一距离;
21、当预设时间内,本车与本车所在车道的车道线的距离变化值大于第一距离时,获得第二目标车辆的第二动态权重系数。
22、优选地,还包括:
23、本车不变道时,预测本车左前方或右前方的第二目标车辆切入本车所在车道时;
24、设置第二目标车辆的第二动态权重系数为预设值;
25、根据第二目标车辆的第二动态权重系数,获得第一目标车辆的第一动态权重系数。
26、优选地,预测本车左前方或右前方的第二目标车辆切入本车车道,包括:
27、第二目标车辆指向本车车道的转向灯亮起;
28、或,
29、第二目标车辆所在车道是边界车道,且第二目标车辆的速度比其前方的第三目标车辆速度快,且第二目标车辆与第三目标车辆的距离小于第二距离;其中,第二目标车辆的速度越快,第二距离越大;
30、或,
31、本车距离本车所在车道的道路截止点的距离大于第一阈值,且第二目标车辆距离第二目标车辆所在车道的道路截止点的距离小于第二阈值,且第二目标车辆所在车道为边界车道或第二目标车辆距离第二目标车辆的相邻车道的道路截止点的距离小于第三阈值。
32、本技术还提供一种车辆目标跟踪的装置,包括:车辆信息获取模块、权重系数获取模块和跟车目标信息获取模块;
33、车辆信息获取模块,用于在本车变道时,分别获得本车的目标车辆的纵向距离、纵向速度和纵向加速度;目标车辆包括本车前方的第一目标车辆和本车变道方向对应的左前方或右前方的第二目标车辆;本车左变道时,第二目标车辆为左前方的车辆,本车右变道时,第二目标车辆为右前方的车辆;
34、权重系数获取模块,用于根据本车的速度和期望跟车距离,以及每个目标车辆的纵向速度和纵向距离,分别获得第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数;
35、跟车目标信息获取模块,用于根据第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数,获得本车跟车目标的纵向距离、纵向速度和纵向加速度。
36、优选地,权重系数获取模块,具体用于根据本车的速度和期望跟车距离,以及每个目标车辆的纵向速度和纵向距离,获得每个目标车辆的危险度系数;根据每个目标车辆的危险度系数,获得第二目标车辆的起始权重、终止权重、权重增长速度和权重降低速度;根据第二目标车辆的起始权重终止权重、权重增长速度、权重降低速度和本车的变道状态,获得第二目标车辆的第二动态权重系数;根据第二目标车辆的第二动态权重系数,获得第一目标车辆的第一动态权重系数。
37、优选地,权重系数获取模块,具体用于根据每个目标车辆的危险度系数,获得第一距离;当预设时间内,本车与本车所在车道的车道线的距离变化值大于第一距离时,获得第二目标车辆的第二动态权重系数。
38、优选地,还包括:预测模块;
39、预测模块,用于在本车不变道时,预测本车左前方或右前方的第二目标车辆是否会切入本车所在车道;
40、权重系数获取模块,还具体用于在预测模块预测第二目标车辆切入本车所在车道时,设置第二目标车辆的第二动态权重系数为预设值;根据第二目标车辆的第二动态权重系数,获得第一目标车辆的第一动态权重系数。
41、由此可见,本技术具有如下有益效果:
42、本技术提供的车辆目标跟踪的方法,在本车变道时,分别获得本车的目标车辆的纵向距离、纵向速度和纵向加速度;目标车辆包括本车前方的第一目标车辆和本车变道方向对应的左前方或右前方的第二目标车辆;本车左变道时,第二目标车辆为左前方的车辆,本车右变道时,第二目标车辆为右前方的车辆;根据本车的速度和期望跟车距离,以及每个目标车辆的纵向速度和纵向距离,分别获得第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数;根据第一目标车辆的第一动态权重系数和第二目标车辆的第二动态权重系数,获得本车跟车目标的纵向距离、纵向速度和纵向加速度。本技术提供的车辆目标跟踪的方法,在本车进行变道时,对目标车道的前方车辆进行提前选择,并综合考虑本车前方车辆信息与目标车道的前方车辆信息,目标车道为左车道或右车道,视左变道还是右变道来决定目标车道,该方法提高了变道情况下对周围车辆参考的均衡性,能够获得更合理的跟车目标信息,提高智能驾驶系统的安全性和舒适性。
- 还没有人留言评论。精彩留言会获得点赞!