车辆的碰撞回避辅助装置的制作方法
本发明涉及对车辆与障碍物(物体)碰撞的回避进行辅助的车辆的碰撞回避辅助装置。
背景技术:
1、以往,已知一种车辆的碰撞回避辅助装置,该碰撞回避辅助装置在车辆与障碍物碰撞的可能性变高的情况下,不依赖于车辆的驾驶员的操作地使车辆减速。例如,专利文献1所记载的车辆的碰撞回避辅助装置被配置为:当判定为在检测到与车辆碰撞的可能性高的障碍物的情况下加速踏板被误踩踏时,执行自动制动控制(不依赖于由车辆的驾驶员进行的制动踏板的操作地使制动器动作的控制)。根据专利文献1所记载的车辆的碰撞回避辅助装置,通过自动制动控制使车辆减速,由此,能对车辆与检测到的障碍物碰撞的回避进行辅助。而且,在专利文献1中公开了如下的控制:当判定为在检测到碰撞的可能性高的障碍物的情况下加速踏板被误踩踏时开始自动制动控制,之后,在判定为转向操作的速度为阈值以上的情况下结束自动制动控制。根据这样的控制,驾驶员能通过一边踩踏加速踏板一边进行转向操作这样的碰撞回避操作使车辆以自身所希望的车速沿着自身所希望的路径行驶以使车辆不与障碍物碰撞。
2、然而,根据专利文献1所记载的车辆的碰撞回避辅助装置,若在车辆的起步时或低速行驶时转向操作的速度也为阈值以上,则自动制动控制结束。并且,若在车辆的起步时或低速行驶时自动制动控制结束,则车辆恐怕会急起步或从低速起进行急加速。此外,车辆的起步时或低速行驶时的加速踏板的操作量为0或大致为0,在从该状态起加速踏板的操作量急剧变大的情况下,驾驶员发生了异常的可能性高。因此,若在这样的情况下自动制动控制结束,则尽管驾驶员发生了异常,车辆恐怕也会急起步或从低速起进行急加速。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2021-79904号公报
技术实现思路
1、本发明是为了解决上述问题而完成的,其目的在于,提供一种车辆的碰撞回避辅助装置,该碰撞回避辅助装置被配置为能在检测到与车辆碰撞的可能性高的障碍物的情况下,适当地回避与障碍物的碰撞。
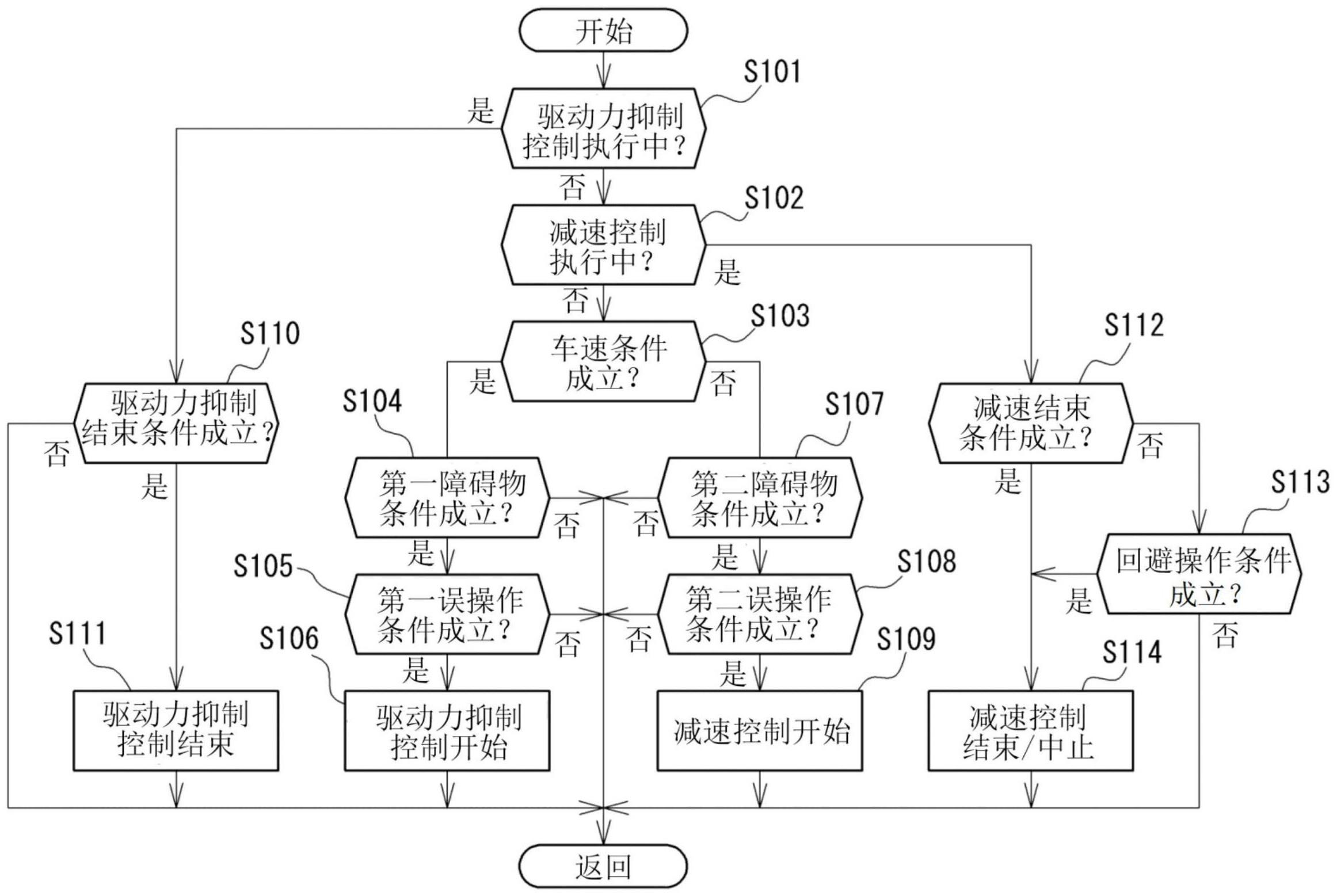
2、为了达成上述目的,本发明的车辆的碰撞回避辅助装置(11)具备:周围信息获取装置(31),被配置为获取作为与存在于车辆(10)的周围区域的物体相关的信息的物体信息;以及控制装置(21),该控制装置(21)被配置为:基于通过所述周围信息获取装置(31)获取到的所述物体信息来判定障碍物条件是否成立,并且判定误操作条件是否成立以及回避操作条件是否成立,其中,该障碍物条件是表示存在与所述车辆(10)碰撞的可能性高的障碍物的条件,该误操作条件是表示由驾驶员进行的使所述车辆(10)的驱动力源所输出的驱动力上升的驱动力上升操作为误操作的条件,该回避操作条件是表示进行了回避所述车辆(10)与所述障碍物的碰撞的转向操作的条件,在判定为所述障碍物条件和所述误操作条件成立的情况下,执行使所述车辆(10)的速度比通过所述驱动力上升操作设定的速度低的车速抑制控制,在所述车辆(10)的速度超过车速阈值时所述回避操作条件成立的情况下,禁止所述车速抑制控制,在所述车辆(10)的速度为所述车速阈值以下时所述回避操作条件成立的情况下,不禁止所述车速抑制控制。
3、优选的是,在车辆行驶中,驾驶员进行了回避车辆与障碍物的碰撞的操作的情况下,车辆以驾驶员所期望的速度沿着驾驶员所期望的路径行驶来回避与障碍物的碰撞。因此,本发明的车辆的碰撞回避辅助装置在判定为车辆正在以超过车速阈值的车速行驶时驾驶员进行了回避车辆与障碍物的碰撞的操作的情况(即,判定为回避操作条件成立的情况)下,禁止车速抑制控制。需要说明的是,“车速抑制控制的禁止”是指,在正在执行车速抑制控制的情况下结束车速抑制控制,在不正在执行车速抑制控制的情况下不开始车速抑制控制。由此,驾驶员能不受车速抑制控制干扰地通过自身的驾驶操作(例如转向操作和驱动力上升操作)来回避与障碍物的碰撞。另一方面,若在车辆的起步时或低速行驶时车速抑制控制被禁止,则车辆恐怕会急起步或从低速起进行急加速。因此,本发明的车辆的碰撞回避辅助装置在车辆的起步时或低速行驶时(即,车速为车速阈值以下的情况),不禁止车速抑制控制。因此,能防止或抑制车辆的急起步和从低速起的急加速。除此之外,在车速为阈值以下时误操作条件成立的情况下,驾驶员可能发生了异常。因此,在这样的情况下不禁止车速抑制控制,由此能在驾驶员发生了异常的情况下,适当地回避与障碍物的碰撞。
4、此外,本发明的车辆的碰撞回避辅助装置(11)具备:周围信息获取装置(31),被配置为获取作为与存在于车辆(10)的周围区域的物体相关的信息的物体信息;以及控制装置(21),该控制装置(21)被配置为:基于通过所述周围信息获取装置(31)获取到的所述物体信息来判定障碍物条件是否成立,并且判定误操作条件是否成立以及回避操作条件是否成立,其中,该障碍物条件是表示存在与所述车辆(10)碰撞的可能性高的障碍物的条件,该误操作条件是表示由驾驶员进行的使所述车辆(10)的驱动力源所输出的驱动力上升的驱动力上升操作为误操作的条件,该回避操作条件是表示进行了回避所述车辆(10)与所述障碍物的碰撞的转向操作的条件,在判定为所述障碍物条件和所述误操作条件成立的情况下,执行使所述车辆(10)的速度比通过所述驱动力上升操作设定的速度低的车速抑制控制,在判定为所述回避操作条件成立的情况下,禁止所述车速抑制控制,其中,在所述障碍物条件和所述误操作条件成立且与所述障碍物不同的其他障碍物存在于所述车辆(10)的行驶预计轨迹的右外侧和左外侧中的一方的情况下,并且在所述转向操作是使所述车辆(10)向与所述一方相反的方向移动的操作的情况下,所述控制装置(21)判定为所述回避操作条件成立。
5、在转向操作(变更车辆的行驶方向的操作)是使车辆朝向与其他障碍物所存在的方向相反的方向行驶的操作的情况下,该操作是驾驶员基于回避车辆与其他障碍物的碰撞的意图的操作的可能性高。因此,在这样的情况下,通过禁止车速抑制控制,能不受车速抑制控制干扰地通过自身的驾驶操作(例如转向操作和驱动力上升操作)来回避与其他障碍物的碰撞。另一方面,在转向操作是使车辆朝向与其他障碍物所存在的方向相同的方向行驶的操作的情况下,驾驶员可能发生了异常。因此,在这样的情况下不禁止车速抑制控制,由此能在驾驶员发生了异常的情况下,适当地回避与障碍物的碰撞。需要说明的是,车辆(10)的“行驶预计轨迹”是指,在车辆(10)进行行驶的情况下“被预计会通过的轨迹”。
6、可以应用如下的构成:所述驱动力上升操作是增大加速踏板(37)的操作量的操作,在所述车辆(10)的速度为所述车速阈值以下时所述加速踏板(37)的操作量为阈值以上的情况下,所述控制装置(21)判定为所述误操作条件成立。
7、在车速为车速阈值以下的情况下加速踏板的操作量成为阈值以上的情况下,表示加速踏板的操作量急剧地变大。在这样的情况下,“由驾驶员进行的使所述车辆的驱动力源所输出的驱动力上升的驱动力上升操作是使所述车辆减速的减速操作的误操作”的可能性高。因此,根据这样的构成,能提高在驾驶员对加速踏板进行了误操作的情况下,防止或抑制车辆的急起步和从低速起的急加速的效果。
8、可以应用如下的构成:所述车速抑制控制是在所述车辆(10)的速度为所述车速阈值以下的情况下,将作为所述车辆(10)的驱动力源的内燃机(38)所输出的驱动力设定为怠速时的驱动力的控制。
9、根据这样的构成,能提高抑制车辆的速度的效果的可靠性。
10、可以应用如下的构成:所述车速抑制控制是在所述车辆(10)的速度为所述车速阈值以下的情况下,将所述车辆(10)的驱动力源所输出的驱动力设定为能维持所述车辆(10)在倾斜的路面上停止的状态的驱动力的控制。
11、根据这样的构成,即使在路面倾斜的情况下也能维持车辆停止的状态。因此,通过车速抑制控制的执行,能防止车辆在倾斜的路面上由于重力而移动。
12、可以应用如下的构成:所述车速抑制控制是在所述车辆(10)的速度超过所述车速阈值的情况下,使所述车辆减速的控制。
13、根据这样的构成,能在车辆正在以超过车速阈值行驶的情况下,回避车辆与障碍物碰撞。
14、在上述说明中,为了有助于发明的理解,对于与实施方式对应的发明的构成要件,用括号添加在实施方式中使用的附图标记,但发明的各构成要件不限定于由所述附图标记规定的实施方式。
- 还没有人留言评论。精彩留言会获得点赞!