基于乘坐舒适度的制动能量回收控制方法与流程
1.本发明涉及汽车控制方法技术领域,具体地指一种基于乘坐舒适度的制动能量回收控制方法。
背景技术:
2.目前基于线控制动的协调式能量回收系统已逐步成为新能源汽车的主要发展方向,但由于成本、技术复杂性等原因,在中低端市场(补贴后售价15万及以下车型)的搭载度并不高,该市场依旧是以叠加式制动回收系统为主。叠加式制动能量回收系统,又名非解耦式制动回收系统,即制动踏板力与轮缸的液压制动力不解耦。该系统踩下制动踏板时会在机械制动力基础上叠加能量回收制动力,结果导致整车的制动力会高于驾驶员踩制动踏板的需求,对制动感受产生负面影响。
3.现行的能量回收,主要是通过减速时电机以负扭矩状态运行实现,即在减速过程中,电机作为“发电机”给动力电池充电。相比于机械制动时踩下制动踏板至制动卡钳发生制动效果的即时响应,以电机为主体的能量回收系统对制动踏板信号的响应是存在一定延迟的,也就是俗称的回收介入延迟。其主要原因是需要对电机-减速器-传动轴这一套系统的齿轮和花键进行保护。
4.电机由驱动状态切换至回收状态的过程,扭矩由正到负,电机的转动方向不变(保持与行驶方向一致),但对输出端的“驱动”切换为了“拖拽”。在这个过程中,驱动系内的每一个齿轮都需要完成啮合方向切换的过程。该切换的过程中可能导致明显的齿轮撞击音和车辆抖动,影响驾乘感受的同时也会对电机及减速器齿轮的寿命造成损害,严重时还会导致齿轮碎裂。
技术实现要素:
5.本发明的目的就是要解决上述背景技术的不足,提供一种基于乘坐舒适度的制动能量回收控制方法。
6.本发明的技术方案为:一种基于乘坐舒适度的制动能量回收控制方法,按照以下步骤进行:
7.s1、将额定扭矩区间[-t
min
,t
max
]划分为驱动扭矩减小区间[ta,t
max
]、扭矩过零区间[-ta,ta]以及回收扭矩增大区间[-t
min
,-ta];
[0008]
s2、根据电机台架测试得到对应t
max
的第一变化率r
downmax
,根据ta对应的扭矩变化率ra的取值范围选择合适的ra,以此确保扭矩从t
max
降低至ta的时间不超过第一设定时间;
[0009]
将驱动扭矩减小区间[ta,t
max
]划分为多个优化减小区间,对除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩的扭矩变化率进行调整,区间内其他扭矩值的扭矩变化率按照初始值扭矩变化率和终点值扭矩变化率进行线性差值的方式获得,对获得的结果进行仿真计算看是否满足设定要求,如果不满足则对优化减小区间进行调整,直至满足设定要求,构建出扭矩为横坐标、扭矩变化率为纵坐标的map图;
[0010]
本技术的设定要求指驱动扭矩减小区间[ta,t
max
]完成的时间要求以及构建的扭矩和时间曲线是光滑无拐点的;
[0011]
s3、选择扭矩过零区间[-ta,ta]内的若干扭矩值将扭矩过零区间[-ta,ta]划分为多个优化过零区间,在设定范围内对选择的扭矩值的扭矩变化率进行设定,优化过零区间内的其他扭矩的扭矩变化率按照线性差值的方式获得,以此确保扭矩过零区间[-ta,ta]的时间不超过第二设定时间;
[0012]
s4、在设定范围内选择-t
min
对应的第二变化率r
upnmax
,维持回收扭矩增大区间[-t
min
,-ta]内扭矩变化率为第二变化率r
upnmax
,确保回收扭矩增大区间[-t
min
,-ta]对应的扭矩时间曲线部分与扭矩过零区间[-ta,ta]对应的扭矩时间曲线部分以及驱动扭矩减小区间[ta,t
max
]对应的扭矩时间曲线部分的衔接处是光滑无拐点的;
[0013]
其中t
max
是电机的最大额定扭矩,-t
min
是电机的最大回收扭矩,t
min
是小于t
max
的。
[0014]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述步骤s2中,按照以下公式计算驱动扭矩减小区间[ta,t
max
]内除ta和t
max
以外的扭矩的初始扭矩变化率:
[0015][0016]
其中:rn——驱动扭矩减小区间[ta,t
max
]内除ta和t
max
以外的扭矩的初始扭矩变化率;
[0017]
tn——驱动扭矩减小区间[ta,t
max
]内除ta和t
max
以外的扭矩;
[0018]rdownmax
——t
max
对应的扭矩变化率;
[0019]
ra——ta对应的扭矩变化率;
[0020]
再通过仿真计算的方式计算驱动扭矩减小区间[ta,t
max
]完成时间是否超过第一设定时间,如果超过第一设定时间,在扭矩变化率ra的取值范围内重新选择ra,直至驱动扭矩减小区间[ta,t
max
]完成时间不超过第一设定时间。
[0021]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述步骤s2中,对除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩的扭矩变化率进行调整的方法包括:按照以下公式对除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩的扭矩变化率进行调整:
[0022][0023]
其中:rn——除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩的扭矩变化率;
[0024]
tn——除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩;
[0025]rdownmax
——t
max
对应的扭矩变化率;
[0026]
ra——ta对应的扭矩变化率;
[0027]
s——系数,取值范围为0.02~0.03。
[0028]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述步骤s2中,对优化减小区间进行调整的方法包括:先按照50nm的限值将驱动扭矩减小区间[ta,t
max
]划分为多个优化减小区间,然后对除t
max
以外的每个优化减小区间的终点值进行-10nm
~10nm的调整,获得优化调整后的优化减小区间。
[0029]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述第一设定时间为0.3s;所述ta为10nm,所述ta对应的扭矩变化率ra的取值范围为ra≤-100nm/s。
[0030]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述步骤s3中,选择扭矩过零区间[-ta,ta]内的若干扭矩值的方法包括:选取0、选取0与ta之间的某个扭矩tb、选取-ta与0之间的扭矩-tb;
[0031]
或者选取0、选取0与ta之间的某个扭矩tb、选取0与tb之间的某个扭矩tc、选取-ta与0之间的扭矩-tb、选取-ta与-tb之间的扭矩-tc。
[0032]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述ta为10nm,选取[-ta,ta]中的-3nm、0nm和3nm;
[0033]
或者选取[-ta,ta]中的-3nm、-1.5nm、0nm、1.5nm和3nm。
[0034]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述步骤s3中,在设定范围内对选择的扭矩值的扭矩变化率进行设定的方法包括:-3nm和3nm对应的扭矩变化率不超过-100nm/s,0nm对应的扭矩变化率不超过-30nm/s。
[0035]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述第二设定时间为0.5s。
[0036]
根据本技术提供的一种基于乘坐舒适度的制动能量回收控制方法,所述步骤s4中,在设定范围内对选择的扭矩值的扭矩变化率进行设定的方法包括:在-100nm/s~-200nm/s之间选择扭矩值的扭矩变化率。
[0037]
本发明的优点有:1、本发明将制动能量回收过程分为三个节段,扭矩减小阶段、扭矩过零阶段和扭矩增大阶段,针对每个阶段采用了不同的控制措施,对于扭矩减小节段本技术通过对扭矩优化减小区间进行分区,对每个分区的扭矩值进行调整,使扭矩优化减小区间的扭矩对时间的map图为平滑无拐点的曲线,在设定时间内完成扭矩减小的过程并且使扭矩变化的更为平顺,避免在此过程中出现抖动、异响等问题;
[0038]
在扭矩过零区间,对扭矩过零区间进行选值并对其设定,扭矩过零区间可以快速完成,扭矩过零区间大幅缩短,回收扭矩可快速达到最大值,确保最大程度的回收制动能量;
[0039]
在扭矩增大区间,通过限定扭矩变化率,最大程度的回收制动能量,并且与扭矩优化减小区间进行光滑衔接,避免出现抖动,扭矩完成换向后变化更加平缓、线性,整体驾乘感受得到极大的改善;
[0040]
2、本发明通过设定公式对每个优化减小区间的初始值扭矩和终点值扭矩的变化率进行调整,利用线性差值计算每个优化减小区间内的其他扭矩的扭矩变化率,整个调整设定的方式极为简单,构建的公式使整个map图的曲线更加光滑且无拐点,反映到实际驾乘上,可以获得更加平顺无抖动的驾乘体验;
[0041]
3、本发明通过先设定初步优化减小区间,然后在初步优化减小区间的基础上进行优化调整,可以根据实车操作进行优化调整,调整的范围减小了,调整的效率提升了,方便进行设计优化;
[0042]
4、本发明将扭矩优化减小区间完成的时间限值设定为0.3s,方便扭矩优化减小区间阶段能够快速达到最大回收扭矩,方便对制动能量的快速回收,第一设定时间的设定方
便对扭矩优化减小区间起点值扭矩的调整;
[0043]
5、本发明对扭矩优化减小区间的起点扭矩的扭矩变化率取值范围设定为ra≤-100nm/s,设定这一取值范围能够配合第一设定时间快速的得到10nm对应的扭矩变化率,在确保扭矩优化减小区间驾驶平顺的情况下快速获得最大回收扭矩;
[0044]
6、本发明对扭矩过零区间的设定是直接选择该区间内的若干扭矩值进行设定,选择的扭矩值可根据经验值进行确定,这样的选择方式能够快速得到扭矩过零区间的扭矩设定情况,根据经验值可以确定在扭矩过零区间的扭矩调整方案,方便扭矩过零区间的平顺快速过渡;
[0045]
7、本发明对于扭矩过零区间扭矩值的选定是靠近0点的扭矩值,确定这些扭矩值的扭矩变化率,就能够快速得到扭矩过零区间扭矩变化的调整方案,设定简单且高效,扭矩过零区间扭矩变化平顺;
[0046]
8、本发明对扭矩过零区间选定的-3nm和3nm对应的扭矩变化率进行了范围设定,这种设定范围配合第二设定时间可以快速得到扭矩过零区间的调整方案,整个设计优化的方法简单;
[0047]
9、本发明的第二设定时间为0.5s,设定这一时间配合扭矩过零区间选择的扭矩值的扭矩变化率,能够快速得到扭矩过零区间的扭矩调整方案,缩短扭矩过零区间的幅度,提高扭矩过零区间的平顺性;
[0048]
10、本发明对于扭矩增大区间设定了扭矩变化率的选择范围,确保了扭矩变化率与扭矩过零区间变化率的平顺过渡,避免了两个区间衔接处出现拐点或是跳变,提高了扭矩过零与扭矩增大过程的平顺性,避免出现抖动等影响驾乘体验的问题发生。
[0049]
本发明的制动能量回收控制方法对制动过程中的各个阶段进行针对性的控制,最大程度回收制动能量的同时使整个制动过程能够非常平顺的进行,解决了制动突兀、回收延迟等不良问题,具有极大的推广价值。
附图说明
[0050]
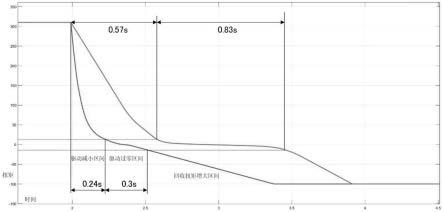
图1:现有制动能量回收控制方法与本技术制动能量回收控制方法示意图(上方曲线为现有制动能量回收控制方法对应的扭矩时间曲线,下方曲线为本技术制动能量回收控制方法对应的扭矩时间曲线)。
具体实施方式
[0051]
下面详细描述本发明的实施例,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0052]
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0053]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性
或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0054]
下面结合附图和具体实施例对本发明作进一步的详细说明。
[0055]
本技术涉及到汽车制动能量回收控制方法,本技术的制动能量回收控制方法将汽车制动过程分为三个区间,驱动扭矩减小区间、扭矩过零区间和回收扭矩增大区间,对于每个区间的扭矩控制采用了不同的方法,通过对每个区间进行不同的控制,使汽车在制动过程中,扭矩的变化更加平顺,消除因电机扭矩换向带来的冲击、抖动和回收介入延迟的不良感受,消除叠加式制动能量回收系统下,驾驶员踩下制动踏板后制动力变化突兀的不良感受。
[0056]
具体的控制方法按照以下步骤进行:
[0057]
s1、将额定扭矩区间[-t
min
,t
max
]划分为驱动扭矩减小区间[ta,t
max
]、扭矩过零区间[-ta,ta]以及回收扭矩增大区间[-t
min
,-ta];
[0058]
驱动扭矩减小区间[ta,t
max
]是制动过程的第一个区间,当车辆出现制动时,制动踏板踩下,车辆的驱动扭矩从t
max
开始减小;当减小到ta时,开始进入到扭矩过零区间[-ta,ta],驱动扭矩会在此过程中减小到0,直至从驱动变换为拖拽,驱动扭矩变为负值;回收扭矩持续增大,超过-ta后,即进入到回收扭矩增大区间[-t
min
,-ta];
[0059]
正常情况下,电机的额定扭矩区间是[-t
max
,t
max
],但在实际应用过程中,电机的回收扭矩达不到-t
max
,因此引入了-t
min
,-t
min
是电机的最大回收扭矩,当电机达到最大回收扭矩-t
min
时,电机的回收扭矩不再变化,维持在最大回收扭矩-t
min
,基于此原因,本案将回收扭矩增大区间设定为[-t
min
,-ta];
[0060]
s2、根据电机台架测试得到对应t
max
的第一变化率r
downmax
,根据ta对应的扭矩变化率ra的取值范围选择合适的ra,以此确保扭矩从t
max
降低至ta的时间不超过第一设定时间;
[0061]
将驱动扭矩减小区间[ta,t
max
]划分为多个优化减小区间,对除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩的扭矩变化率进行调整,区间内其他扭矩值的扭矩变化率按照初始值扭矩变化率和终点值扭矩变化率进行线性差值的方式获得,对获得的结果进行仿真计算看是否满足设定要求,如果不满足则对优化减小区间进行调整,直至满足设定要求,构建出扭矩为横坐标、扭矩变化率为纵坐标的map图;
[0062]
电机在出厂前,会进行相应的台架测试,根据台架测试的情况,可以从测试图中找到对应t
max
对应的第一变化率r
downmax
;而ta对应的扭矩变化率ra是设定的,本身ta也是选定的,扭矩变化率ra是根据第一设定时间来进行确定的,确定ta对应的扭矩变化率ra是初步的确定,其目的是满足驱动扭矩减小区间[ta,t
max
]的变化时间,即在满足设定时间要求内完成驱动扭矩减小的过程,满足快速制动的要求,但是此时只是初步满足制动要求,并不满足快速制动的同时消除抖动、冲击的要求,即扭矩的变化使的车辆在制动过程中并不平顺,因此需要对驱动扭矩减小进行进一步的优化;
[0063]
具体的,本技术通过对驱动扭矩减小区间[ta,t
max
]进行分区设置,然后对每个优化减小区间的端点进行重新优化调整,使最后形成的扭矩、时间曲线更加平顺光滑,对应到制动过程就是扭矩控制更加平顺,能够消除制动过程中抖动和冲击的问题,优化减小区间的端点是进行设定方式的优化,而优化减小区间端点以外的值是通过线性差值的方式获得
的,即确保了优化后的驱动扭矩减小区间[ta,t
max
]的时间仍然满足上述的设定时间要求;
[0064]
s3、选择扭矩过零区间[-ta,ta]内的若干扭矩值将扭矩过零区间[-ta,ta]划分为多个优化过零区间,在设定范围内对选择的扭矩值的扭矩变化率进行设定,优化过零区间内的其他扭矩的扭矩变化率按照线性差值的方式获得,以此确保扭矩过零区间[-ta,ta]的时间不超过第二设定时间;
[0065]
扭矩过零区间[-ta,ta]的控制是通过对扭矩过零区间[-ta,ta]内的特定扭矩进行精确设定,这一精确设定是基于扭矩过零区间[-ta,ta]完成的时间、以及ta对应的扭矩变化率来进行确定的,其目的是扭矩过零区间[-ta,ta]能够在设定的时间内完成,并且与驱动扭矩减小区间可以进行合适的衔接,避免在衔接位置出现拐点(对应到车辆制动,就是抖动或者冲击),也就是驱动扭矩减小区间[ta,t
max
]形成的扭矩时间曲线与扭矩过零区间[-ta,ta]形成的扭矩时间曲线的衔接位置是光滑平顺无拐点;
[0066]
s4、在设定范围内选择-t
min
对应的第二变化率r
upnmax
,维持回收扭矩增大区间[-t
min
,-ta]内扭矩变化率为第二变化率r
upnmax
,确保回收扭矩增大区间[-t
min
,-ta]对应的扭矩时间曲线部分与扭矩过零区间[-ta,ta]对应的扭矩时间曲线部分以及驱动扭矩减小区间[ta,t
max
]对应的扭矩时间曲线部分的衔接处是光滑无拐点的;
[0067]
当回收扭矩超过-ta时,此时随着制动的继续进行,回收扭矩逐渐增大,制动回收的能量越来越多,此时需要考虑的是最大程度的回收制动能量,快速达到车辆容许的最大回收扭矩,然后在此基础上确定整个回收扭矩增大过程的平顺性,因为回收扭矩增大区间是衔接扭矩过零区间的,因此对于-ta的扭矩变化率需要进行针对性的设定调节,避免两个区间衔接位置出现不光滑或者是拐点,也就是回收扭矩增大区间[-t
min
,-ta]形成的扭矩时间曲线与扭矩过零区间[-ta,ta]形成的扭矩时间曲线的衔接位置是光滑平顺无拐点。
[0068]
在本技术的一些实施例中,本实施例对上述的步骤s2进行了优化,具体的步骤s2中,按照以下公式计算驱动扭矩减小区间[ta,t
max
]内除ta和t
max
以外的扭矩的初始扭矩变化率:
[0069][0070]
其中:rn——驱动扭矩减小区间[ta,t
max
]内除ta和t
max
以外的扭矩的初始扭矩变化率;
[0071]
tn——驱动扭矩减小区间[ta,t
max
]内除ta和t
max
以外的扭矩;
[0072]rdownmax
——t
max
对应的扭矩变化率;
[0073]
ra——ta对应的扭矩变化率;
[0074]
再通过仿真计算的方式计算驱动扭矩减小区间[ta,t
max
]完成时间是否超过第一设定时间,如果超过第一设定时间,在扭矩变化率ra的取值范围内重新选择ra,直至驱动扭矩减小区间[ta,t
max
]完成时间不超过第一设定时间。实际上就是通过在设定的取值范围内进行不断的重复尝试,直到选择的ra满足设定的时间要求,这一步的目的是初步确定ta的扭矩变化率ra。
[0075]
在上述的步骤s2中,对除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩的扭矩变化率进行调整的方法包括:本实施例在通过电机台架实验确定了对应t
max
的扭矩变化率r
downmax
后,对驱动扭矩减小区间[ta,t
max
]进行了初步分区,初步分区的分度值
根据实际情况进行设定,比如50nm,通过初步分度值将驱动扭矩减小区间[ta,t
max
]划分为多个独立的优化减小区间,此时可以通过以下公式对除ta和t
max
以外的扭矩的初步优化减小区间的端点值进行计算:
[0076][0077]
其中:rn——除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩的扭矩变化率;
[0078]
tn——除ta和t
max
以外的每个优化减小区间的初始值扭矩和终点值扭矩;
[0079]rdownmax
——t
max
对应的扭矩变化率;
[0080]
ra——ta对应的扭矩变化率;
[0081]
s——系数,取值范围为0.02~0.03。
[0082]
本实施例仅对优化减小区间的端点值进行计算,每个优化减小区间除端点以外的值是通过端点进行线性差值的方式计算得到的,体现在扭矩和扭矩变化率的map图上,就是一条多段折线结构,即每个优化减小区间对应的都是一条直线,多个优化减小区间的直线相互衔接形成多段的折线。但实际操作过程中,还需要对扭矩和时间的map图进行观察,即观察驱动扭矩减小区间[ta,t
max
]的过程中,扭矩为x轴、时间为y轴的关系曲线,需要确保这一曲线是光滑平顺的。体现在驾驶体验上,就是越光滑平顺的曲线驾驶体验感越好,一旦曲线上出现拐点在体验感上形成的就是抖动或是冲击。
[0083]
根据上述的公式以及计算的结果,可以通过仿真的方式验算上述的结果是否满足驱动扭矩减小区间[ta,t
max
]的时间要求,同时也可以观察在上述计算结果的情况下,驱动扭矩减小区间[ta,t
max
]这一过程中扭矩与时间的曲线是否光滑,如不满足设定的时间要求或者是出现的扭矩时间曲线不平顺,就需要对优化减小区间进行优化调整。
[0084]
在本技术的另外一些实施例中,本实施例对上述步骤s2中,对优化减小区间进行优化调整的方法包括:先按照50nm的限值将驱动扭矩减小区间[ta,t
max
]划分为多个优化减小区间,然后对除t
max
以外的每个优化减小区间终点值进行-10nm~10nm的调整,获得优化调整后的优化减小区间。
[0085]
比如,将ta设定为10nm,将t
max
设定为300nm,初始分度值为50nm,那可以将[10,300]划分为[10,60]、[60,110]、[110,160]、[160,210]、[210,260]和[260,300]六个初步优化减小区间,然后统一对60、110、160、210和260进行-10nm~10nm的调整得到优化调整后的优化减小区间。这里的优化调整是对每个优化减小区间进行单独调整,调整的幅度在-10nm~10nm,也就是说假设某个优化减小区间的终点值为70nm,调整后的优化减小区间的终点值可以为71nm或者是79nm。
[0086]
对优化调整后的优化减小区间的端点值扭矩对应的扭矩变化率按照上述的公式进行调整,得到优化后的端点扭矩变化率,按照端点扭矩变化率获得驱动扭矩减小区间[ta,t
max
]的扭矩、扭矩变化率关系图以及扭矩与时间的关系曲线,对驱动扭矩减小区间[ta,t
max
]的扭矩与时间的关系曲线进行分析,判断是否存在拐点或是不光滑的地方(主要是相邻两个优化减小区间衔接的位置),如果存在,那就重新对优化减小区间的端点进行增减调整,直至获得光滑且无拐点的驱动扭矩减小区间[ta,t
max
]的扭矩、时间关系曲线图。
[0087]
本实施例的第一设定时间是0.3s,如图1所示驱动扭矩减小区间[ta,t
max
]完成的
时间为0.24s,即驱动扭矩减小区间[ta,t
max
]完成的时间要不超过0.3s。
[0088]
本实施例的ta设定为10nm,ta对应的扭矩变化率ra的取值范围为ra≤-100nm/s。
[0089]
在本技术另外一些实施例中,本实施例对上述步骤s3中,选择扭矩过零区间[-ta,ta]内的若干扭矩值的方法进行了优化,具体的可以选取0、选取0与ta之间的某个扭矩tb、选取-ta与0之间的扭矩-tb;或者选取0、选取0与ta之间的某个扭矩tb、选取0与tb之间的某个扭矩tc、选取-ta与0之间的扭矩-tb、选取-ta与-tb之间的扭矩-tc。
[0090]
更为具体的,ta为10nm,选取[-ta,ta]中的-3nm、0nm和3nm;或者选取[-ta,ta]中的-3nm、-1.5nm、0nm、1.5nm和3nm。
[0091]
其中,-3nm和3nm对应的扭矩变化率不超过-100nm/s,0nm对应的扭矩变化率不超过-30nm/s。
[0092]
上述的调整主要是基于经验进行调整和设定,就是通过大量的实车来验证,当处于扭矩过零区间[-ta,ta],通过设定-3nm、3nm和0nm为上述的范围内时,该过程能够平顺的完成,驾驶者感觉不到抖动或是冲击,为驾驶者在扭矩过零区间[-ta,ta]提供良好的舒适度。
[0093]
而扭矩过零区间[-ta,ta]完成的时间不超过第二设定时间,第二设定时间为0.5s,即扭矩过零区间[-ta,ta]的完成时间不超过0.5s,如图1所示中,扭矩过零区间[-ta,ta]的完成时间为0.3s。
[0094]
上述的方式可以得到ta对应的扭矩变化率(通过对驱动扭矩减小区间[ta,t
max
]的分析时得到的),以及扭矩过零区间[-ta,ta]中的一些特定在的扭矩变化率,-3nm、0nm和3nm对应的扭矩变化率,然后通过第二设定时间的设定可以得到-ta对应的取值范围,
[0095]
这一步的调整还可以进行实车操作来进行验证,实车进行测试,看是否在车速10km/h至30km/h区间内任意车速下的tip in/out工况都没有发生电机抖动、减速器打齿敲击音等不良;若出现该不良,则需要采集电机实际扭矩、实际转速等数据,明确抖动、敲击音等不良出现时对应的扭矩区间,对扭矩过零区间[-ta,ta]选定的扭矩对应的扭矩值进行修改,这部分的修改是细微的调整,通常在-50nm~50nm之间进行调整。
[0096]
在本技术的进一步的实施例中,本实施例对上述步骤s4中,在设定范围内对选择的扭矩值的扭矩变化率进行设定的方法进行了优化,具体的在-100nm/s~-200nm/s之间选择扭矩值的扭矩变化率。在回收扭矩增大区间[-t
min
,-ta]是维持整个区间的扭矩变化率不变的,即进入到回收扭矩增大区间[-t
min
,-ta]后可以很快达到最大回收扭矩,最大程度的对制动能量进行回收,本实施例对最大回收扭矩进行设定,按照上述的范围选择合适的回收扭矩。同时,需要考虑到回收扭矩增大区间[-t
min
,-ta]与扭矩过零区间[-ta,ta]衔接的问题,即回收扭矩增大区间[-t
min
,-ta]中-ta对应的扭矩变化率与扭矩过零区间[-ta,ta]中的-ta的扭矩变化率是相等的,不能在扭矩过零区间[-ta,ta]对应的扭矩时间曲线与回收扭矩增大区间[-t
min
,-ta]对应的时间曲线衔接处出现拐点。
[0097]
实际应用时,从时间角度分析回收扭矩增大区间[-t
min
,-ta]可以分为两个阶段,一是回收扭矩增大阶段,这一阶段是从-ta开始,按照设定的-ta扭矩变化率进行持续增大,直至增大到最大回收扭矩-t
min
;第二阶段是,达到最大回收扭矩-t
min
后,扭矩变化率直接变为0,按照最大回收扭矩-t
min
进行持续的制动能量回收。
[0098]
在对扭矩过零区间[-ta,ta]的分析过程中,-ta对应的扭矩变化率是可以基于第二
设定时间得到一个取值范围,而在对回收扭矩增大区间[-t
min
,-ta]进行分析的过程中,-ta对应的扭矩变化率有另一个取值范围,两个取值范围的交集就是符合设定要求的取值范围,在此取值范围内选择合适的对应-ta的扭矩变化率。
[0099]
本技术的最大回收扭矩即-t
min
不超过-100nm。
[0100]
本技术是按照上述的方法得到扭矩的控制方式,构建出完整的扭矩、扭矩变化率和时间的关系曲线,然后存储到汽车的控制系统中,当实车运行产生制动需求时,即可根据上述的关系曲线进行相应的控制调节。
[0101]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1