考虑车轮打滑的轮式移动机器人自适应神经网络控制方法
本发明涉及神经网络控制,尤其涉及考虑车轮打滑的轮式移动机器人自适应神经网络控制方法。
背景技术:
1、伴随着计算机技术水平和信息采集与处理技术水平的不断提高,新的农业生产模式和新技术的应用促进了农业机械的更新和发展,智能农业机械的技术条件已经成熟,而移动平台是农业机器人的运动基础。农田作业特点决定了农业移动机器人结构与工业移动机器人结构的不同,具体地说农业移动机器人一般是作业、移动同时进行,其工作环境范围狭窄、距离较长且遍及区域较广。因此有必要研究一种适用于复杂农田作业环境的移动机器人。农业移动机器人一个重要的课题是确定机器人本体在三维空间中的连续运动控制技术,在这方面近年来全球卫星定位系统(gps)、地理信息系统(gis)和遥感系统(rs)正发挥着越来越大的作用,还有利用深度学习摄像头对路面进行识别从而实现农业移动平台的运动控制。但上述方法均存在轨迹跟踪误差较大、对外界干扰较为敏感等问题,此外其对复杂农田作业路面的具体情况难以做出实时补偿修正,比如土地湿度过大而导致的轮胎打滑等问题。上述问题将影响移动机器人在运行过程中的运动控制性能,为提高移动机器人系统对不同作业路面的适应性与轨迹跟踪控制精度,有必要对其控制技术进行设计。
2、文献《基于双环滑模控制的全方位移动机器人轨迹跟踪研究》(车洪磊,高技术通讯.2022,32(7):756-762)提出了双环滑模控制策略来实现内外环的位置及速度跟踪,应用lyapunov稳定性理论证明了系统的稳定性,一定程度上实现了较高的轨迹跟踪精度。该方法存在如下不足:该方法设计的滑模控制器需要已知控制系统不确定项误差边界,但是对于大部分作业于复杂农田的轮式移动机器人系统,并不能确定其不确定项边界。
3、文献《全轮转向移动平台的设计与实现》(华飞,安徽大学.2017)通过对模糊神经网络自学习算法的研究,设计了全轮转向移动平台的轨迹跟踪控制器。该方法存在如下不足:该方法采用误差逆传播算法更新神经网络的权重值,而当作业于复杂农田路面的移动机器人面对车轮打滑情况时,若仅用离线神经网络计算,不能在线更新网络权重,易造成跟踪精度不高,偏移量过大等问题。
技术实现思路
1、本发明针对上述现有技术所存在的问题,提出了考虑车轮打滑的轮式移动机器人自适应神经网络控制方法。
2、本发明采取的技术方案如下:
3、考虑车轮打滑的轮式移动机器人自适应神经网络控制方法,包括如下步骤:
4、s1、建立以底盘为中心的参考坐标系,考虑三自由度移动平台车轮速度、纵向速度、横向速度及横摆角速度的运动学模型;
5、s2、基于步骤s1所建立的运动学模型,考虑由滑移角和车轮打滑产生的纵向和横向轮的摩擦,建立包含车轮打滑及外部干扰的轮式移动机器人动力学模型;
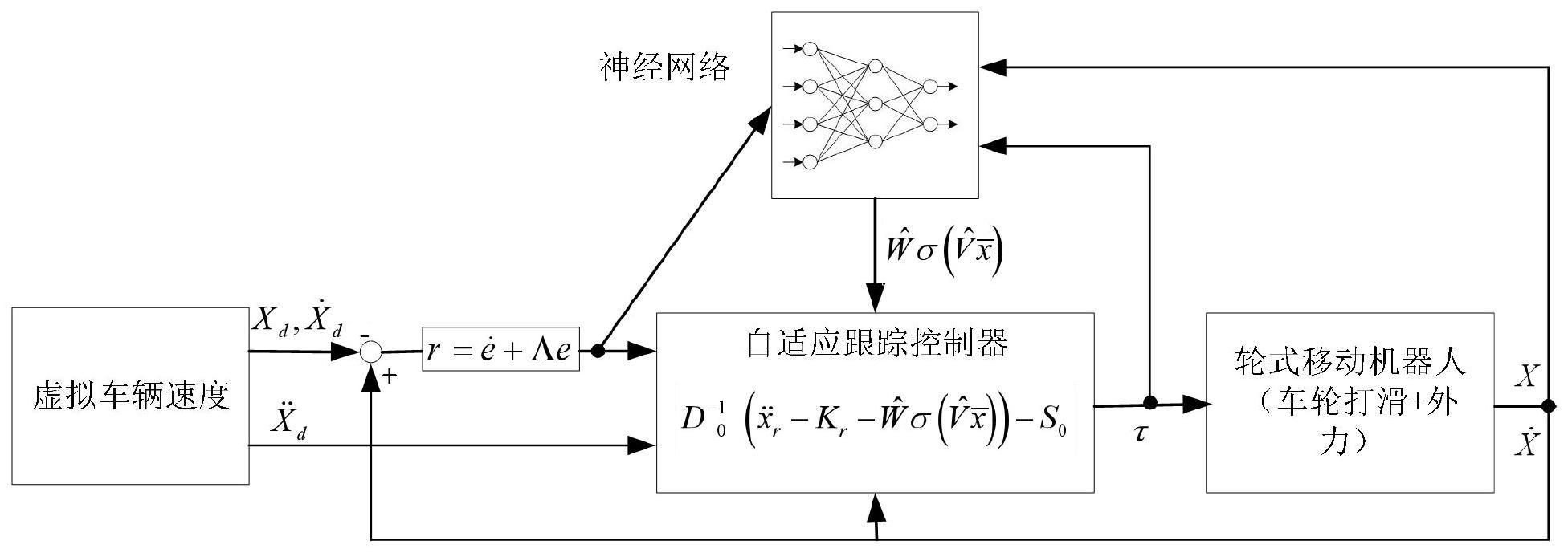
6、s3、基于步骤s2所建立的轮式移动机器人动力学模型,建立以轮式移动机器人实时跟踪误差为输入、以车轮打滑和外部干扰力的补偿参数为输出的在线多层神经网络模型,以逼近轮式移动机器人控制系统存在的车轮打滑及外界干扰等不确定性;
7、s4、基于步骤s3所建立的多层神经网络模型,通过结合e-修正项的反向传播算法,定义能够在线更新多层神经网络权重的自适应规则,用于提升轮式移动机器人对不同作业路面的适应性与轨迹跟踪精度。
8、作为本发明的优选技术方案,所述s1包括如下步骤:
9、选取o-xy为全局坐标系,g-xy为固定在轮式移动机器人上的坐标系,g为轮式移动机器人的质心,定义如下运动学模型:
10、
11、式中,u,v分别是轮式移动机器人重心处的纵向和横向速度,r表示偏航率,wr,wl分别表示左右车轮的角速度,vs表示车轮打滑速度,通过添加vs,urs,uls三个速度分量来考虑车轮打滑模型,其均设为零时,得到无车轮打滑情况下的运动学模型:
12、
13、考虑具有三个自由度平面情况下的轮式移动机器人,以底盘为中心参考系得到轮式移动机器人的外力和力矩总和如下:
14、
15、式中,fl,fr分别是驱动左右车轮的摩擦力,px,py,md分别是作用在轮式移动机器人质心处的外力和力矩,m为轮式移动机器人的质量,iz是轮式移动机器人绕z轴的惯性矩,n是传动比,τr,τl分别是在左右车轮上的扭矩输入;此处轮式移动机器人的工作位置并不总在质心,应使等效力和力矩将工作位置处的外力转化为轮式移动机器人的质心。
16、作为本发明的优选技术方案,所述s2包括如下步骤:分别获得由滑移角和轮胎滑移产生的纵向和横向轮胎力,其均由u,v,r,wl,wr确定,通过消除轮胎力并且重新格式化全动态运动方程并对时间求导数,从而获得坐标系中位置矢量的动力学方程如下:
17、
18、式中,
19、通过将所有滑动条件和外力设置为零,轮式移动机器人的非完整模型为:
20、
21、式中,
22、作为本发明的优选技术方案,所述s3包括如下步骤:建立在线多层神经网络模型,其输出如下公式:
23、
24、式中,ni,nh,no分别为输入层,隐含层和输出层神经元数量,vjk,wij为隐含层和输出层的调节权重,θvi,θwi为阈值偏移量,激活函数如下:
25、
26、根据公式(6)与公式(7),输出如下公式:
27、
28、定义由于车轮打滑和外部干扰力导致的未知不确定性函数:
29、
30、轮式移动机器人未知不确定性参数采用神经网络输出的形式表示:
31、
32、式中,w*,v*为输出层和隐含层的最优权重矩阵,为神经网络输入向量,为有界神经网络近似误差;
33、轮式移动机器人的期望轨迹为xd,定义跟踪误差如下:
34、
35、将跟踪误差进行滤波可得:
36、
37、式中,λ=δt>0是设计参数矩阵,定义为参考速度矢量;针对轮胎打滑和外部干扰力的轮式移动机器人提出如下的自适应跟踪控制器:
38、
39、式中,k是正定矩阵,为神经网络的输出,,以此来补偿车轮打滑和外部干扰力的影响。
40、作为本发明的优选技术方案,所述s4包括如下步骤:
41、基于所构建的多层神经网络,结合改进的反向传播算法,定义能够在线更新网络权值的自适应规则,实现根据轮式移动机器人对不同作业路面的适应性定义目标函数如下:
42、
43、更新的规则如下:
44、
45、式中,第一项是反向传播项,第二项是e-修正项,α1,2>0是学习率,β1,2>0是很小的正数;通过第二项e-修正项能够改进自适应更新神经网络权值的性能,结合反向传播算法,以保证多层神经网络结构对控制系统不确定性的鲁棒性,从而提升轮式移动机器人对不同作业路面的适应性与轨迹跟踪精度。
46、本发明所述的考虑车轮打滑的轮式移动机器人自适应神经网络控制方法,采用以上技术方案与现有技术相比,具有以下技术效果:
47、1、本发明建立轮式移动机器人在线多层神经网络模型,以逼近该控制系统存在的车轮打滑及外界干扰等不确定性。以轮式移动机器人实时跟踪误差为输入、车轮打滑和外部干扰力的补偿参数为输出,结合e-修正项的反向传播算法以保证多层神经网络结构对控制系统不确定性的鲁棒性,从而提升轮式移动机器人对不同作业路面的适应性与轨迹跟踪精度。
48、2、本发明无需已知不确定项边界大小,能够应用于各种复杂农田作业环境。
- 还没有人留言评论。精彩留言会获得点赞!