一种物流机器人
本发明涉及物流机器人,特别涉及一种物流机器人。
背景技术:
1、物流机器人是针对物流运输方面设计的智能机器人。关于物流机器人,已有相关专利,比如申请号:cn202222117808.0公开了一种工业物流机器人,包括载货车厢,所述载货车厢的一端安装有集成了agv导航与控制系统的导航车头,所述载货车厢的另一端安装有车尾托台,所述车尾托台上方安装有高度调节器,所述导航车头与所述车尾托台之间设置有复合电缆线,所述导航车头与所述高度调节器通过所述复合电缆线电连接,所述高度调节器上靠近所述载货车厢的一侧安装有六轴机械手,所述六轴机械手的末端安装有安装模块。该专利进行外部改装的方式,实现可控调节工业物流机器人抓取货物高度的目的,使工业物流机器人能够从更高的货架上装卸货,降低了推广成本,实现物流运输过程中更高效的空间利用率。
2、上述专利虽然实现物流运输过程中更高效的空间利用率,但在实际使用过程中仍存在以下几点问题:
3、1、现有技术中,在货物运输过程中因路途的颠簸或碰撞,造成货物在物流机器人内发生相互碰撞,造成货物的损坏的情况,导致了货物运输损耗大大提升,提高运输成本;
4、2、现有技术中,无法保证货物运输过程中对物流机器人的实时监控,无法判断取货工程中货物情况,取货人员违规操作无法智能识别,容易发生判断误差造成货物丢失的后果;
5、3、现有技术中,不能对物流机器人的运送路线进行统筹管理,无法对危险信号进行提前判断与预警,无法将货物运输和车辆间进行数据交互,导致在货物出现问题后部分参与方不能得知货物出现问题的原因和地点,导致物流问题处理时间过长,影响货物运输效率。
技术实现思路
1、本发明的目的在于提供一种物流机器人,通过物流固定机构依次将活动夹板与货物抵接固定,保证在货物运送的过程中,不发生晃动颠簸,有效的保证了货物的运送质量,避免货物的损坏,提高了运送效率,降低运输成本,降低运输损耗,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
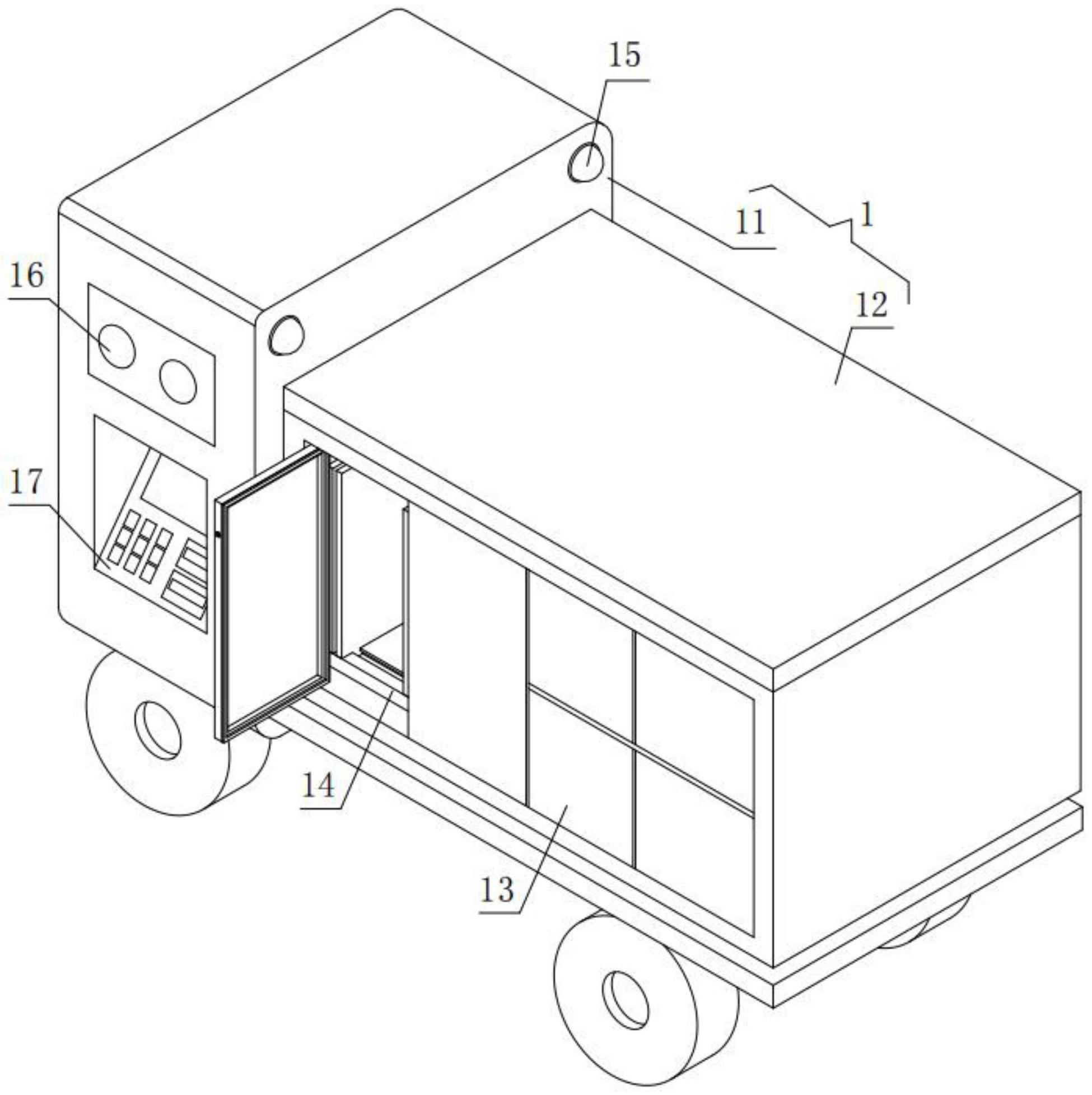
3、一种物流机器人,包括机器人本体和用于机器人本体货物调配的控制系统,所述机器人本体包括车身和物流箱,物流箱安装在车身上,物流箱内为若干矩阵排列的独立腔室,并且独立腔室的体积不等,并在柜体上对应设置有封闭独立腔室的存取门,独立腔室内安装有物流固定机构,车身靠近存取门一侧安装有监控摄像头,车身一侧分别安装有人脸识别摄像头和工作面板,车身内安装有控制系统和蓄电池。
4、进一步的,所述物流固定机构包括货物放置板、活动夹板和上固定板,货物放置板下表面通过螺栓与物流箱内壁固定连接,活动夹板下表面两侧通过滑条与货物放置板滑动连接,货物放置板上表面两侧设置有与滑条相适配的滑槽,货物放置板上表面两端分别设置有平移导柱,上固定板上表面安装有夹板驱动机构。
5、进一步的,所述夹板驱动机构包括驱动气缸、固定座、第一导向板、第二导向板和第三导向板,固定座下表面通过螺栓与上固定板固定连接,驱动气缸一端通过螺栓与固定座上表面固定连接,驱动气缸另一端通过气缸杆与第三导向板上表面固定连接,固定座下表面与第一导向板滑动连接,第一导向板下表面与第二导向板滑动连接,第二导向板下表面与第三导向板滑动连接。
6、进一步的,所述第一导向板、第二导向板和第三导向板下表面分别安装有平移杆,平移杆两端分别设置有平移导套,平移导套与平移导柱嵌套连接,上固定板两侧分别设置有与平移导套相适配的导向槽,第一导向板、第二导向板和第三导向板下表面在同一水平面上,固定座与第一导向板连接的滑动摩擦力小于第一导向板与第二导向板连接的滑动摩擦力,第一导向板与第二导向板连接的滑动摩擦力小于第二导向板与第三导向板连接的滑动摩擦力。
7、进一步的,所述控制系统包括:
8、终端数据处理单元,用于从所述工作面板主动上传的数据中获取待放入物流箱的货物条码数据,从所述监控摄像头中获取与所述货物条码数据对应的监控视频数据,从工作面板中获取货物提取指令数据;
9、云端数据获取单元,用于从云端匹配与所述货物条码数据绑定的数据包,将所述数据包与所述机器人本体生成关联信息,同时,从所述数据包中提取送达终点,并基于所述送达终点制定运输计划;
10、运输执行单元,用于基于所述运输计划控制机器人本体执行运输计划的行进路线,并实时上传所述机器人本体的定位数据,获取异常信息后进行异常警报。
11、进一步的,所述终端数据处理单元包括:
12、pda识别模块,用于对货物上的货物条码进行识别并进行数值化处理,将数值化处理后的货物条码数据基于物联网上传至云端;
13、数据比对模块,用于确定所述货物条码数据的数据类型,基于所述数据类型从云端获取当前数据类型的数据包,将所述货物条码数据输入至数据包中进行一一匹配,得到匹配结果,并将所述匹配结果缓存至终端货物数据库中;
14、核查反馈模块,用于获取所述工作面板中获取货物提取指令数据,将所述货物提取指令输入至所述终端货物数据库进行比对,获取比对结果;
15、其中,若所述比对结果为0,则将所述货物提取指令数据主动上传至云端进行匹配,并获取与匹配结果对应的定位数据及其绑定的另一机器人本体数据,并在工作面板上显示。
16、进一步的,所述终端数据处理单元,还包括:
17、电量检测单元,用于基于电池组电压确定物流机器人的电池组中的剩余电量,同时,获取电池组当前的温度参数,并基于预设温度电量变化曲线对确定的剩余电量进行修正,得到目标剩余电量;
18、用电时长确定单元,用于获取所述电池组的目标剩余电量,基于用电率确定所述电池组的用电量与剩余用电时长的变化规律,并基于所述变化规律确定所述电池组在用电时长内各时刻对应的电量值;
19、信息同步单元,用于:
20、获取对用户信息的验证结果,并基于验证结果确定用户与所述物流机器人的目标移动距离,基于所述目标移动距离将所述物流机器人的电池组对应的用电量值在所述目标移动距离进行同步显示;
21、并当显示结果判定电池组无法完成目标移动距离时,基于判定结果向用户发送低电量提醒,同时,基于当前用电量值寻找距离最近的物流机器人充电桩。
22、进一步的,所述云端数据获取单元包括:
23、数据读取模块,用于从所述终端数据处理单元主动上传的数据,确定所述机器人本体的初始定位数据,并在云端地图中实时显示所述机器人本体位置;
24、数据分类模块,用于提取所述货物对应的目标位置数据,基于所述初始定位数据将所述目标位置数据输入至云端地图中进行显示,确定该货物的运行路线和最大行驶速度;
25、运输计划制定模块,用于确定运输计划,对所述运输计划进行分析,确定所述运输计划的优先级,并基于所述优先级对所述运输计划进行排列。
26、进一步的,所述运输执行单元包括:
27、物流控制模块,用于基于物联网确定所述运输计划中的每个货物运行路线的交点,根据每个货物运行路线的交点对应的最大行驶速度,确定当前行驶速度下计划路径的预计送达时间;
28、紧急避障模块,用于基于所述机器人本体的监控摄像头进行行进路线监控,获取障碍物数据进行识别,确定障碍物数据后获取避障指令,并基于所述避障指令执行障碍物规避操作;
29、异常警报模块,用于获取机器人本体上传的行驶数据和监控摄像头上传的监控数据,提取所述行驶数据和监控数据中的目标数据,并判断所述目标数据是否在正常范围,若超出预设范围则发出警报。
30、进一步的,所述异常警报模块判断所述目标数据是否在正常范围,若超出预设范围则发出警报,具体为:
31、基于所述运行路线和最大行驶速度,生成行驶方案,在所述机器人本体行驶过程中分析所述机器人本体的运行行为是否符合所述行驶方案;
32、基于所述监控数据识别取货行为,生成取货行为特征,在所述机器人本体打开存取门后,判断取货人员的取货行为是否符合所述取货行为特征;
33、若不符合,提取所述机器人本体的异常数据,判断所述异常数据的异常类型,基于所述异常类型的属性进行相应的报警工作。
34、与现有技术相比,本发明的有益效果是:
35、1.通过监控摄像头实时监控存取门一侧的取货监控数据,以可视化信息的形式呈现,避免在货物出现问题后不能得知货物出现问题的原因,提高了货物物流管理的及时性、可靠性和效率性,通过驱动气缸推动第三导向板,依次将活动夹板与货物抵接固定,保证在货物运送的过程中,不发生晃动颠簸,有效的保证了货物的运送质量,避免货物的损坏,提高了运送效率,降低运输成本,降低运输损耗。
36、2.通过终端数据处理单元将终端获取的数据与云端进行比对,云端数据获取单元基于比对结果进行货物信息绑定,并依据机器人本体中装载的货物进行运输路线的规划,确定运输计划的优先级,并基于优先级执行运输计划,提高了物流运输的效率,运输执行单元严格执行运输计划中的行进路线,并对机器人本体和取货人员进行实时监控,提高了运输安全和货物安全,同时节省了大量的人力物力。
37、3.通过基于所述运行路线和最大行驶速度,生成行驶方案,判断机器人本体的运行行为是否规范;基于所述监控数据识别取货行为,生成取货行为特征,判断取货人员的取货行为是否规范,对机器人本体和取货人员进行双向管理,并根据异常类型提前预警,避免机器人本体物流运输过程中出现事故,取件人员违规取件的情况,提高货物安全。
38、4.通过电池组电压确定物流机器人的电池组中的剩余电量,基于变化规律确定电池组在用电时长内各时刻对应的电量值,计算当前物流机器人的使用电量是否满足其配送任务,并在无法完成配送任务时向用户发送低电量提醒并进行自助充电,有效提高了物流机器人的人性化水平,用户实时关注物流机器人的电量状况和配送情况,避免物流机器人在长时间配送后造成亏电,从而影响物流的配送的情况,同时提高了物流机器人的配送效率。
- 还没有人留言评论。精彩留言会获得点赞!