底盘自适应调节方法、装置、设备和存储介质与流程
本技术涉及车辆底盘,特别是涉及一种底盘自适应调节方法、装置、设备和存储介质。
背景技术:
1、汽车底盘是汽车的三大件之一,且汽车底盘由传动系、行驶系、转向系和制动系四部分组成。汽车底盘的作用是支承、安装汽车发动机及其各部件、总成,形成汽车的整体造型,并接受发动机的动力,使汽车产生运动,保证正常行驶。
2、众所周知,一般汽车在平整公路上行驶时,基本可以以正常的速度平稳行驶,但是,当在野外复杂路面行驶时,汽车可能就会发生震动颠簸等情况。为了在任何情况下都可以保证汽车平稳的行进,一般研发人员会给汽车设置动态底盘控制系统,亦称“自适应底盘控制系统”,该系统能够针对路面条件和驾驶工况实现底盘悬架的自适应调整,以实现将汽车底盘调节成不同的模式,达到适用于各种路面情况的目的。
3、在传统的实现方式中,汽车动态底盘控制系统一般均是采用给悬降传感器设置阈值的方式,即针对路面的不同颠簸程度设置不同的阈值,每个阈值又对应不同的悬架模式,进而可以达到基于路面的颠簸程度对底盘的悬架模式进行调节的目的。
4、然而,上述方式参照的变量比较单一,并且针对不同的悬架模式均是依据提前设置的固定阈值进行调节的,无法根据当前情况进行实时的调整,存在调节不灵活且准确率低的缺陷。
技术实现思路
1、基于此,本技术提供了一种底盘自适应调节方法、装置、设备和存储介质,通过结合车速、路面颠簸等级和颠簸时长等多方面的因素,动态自适应调节车辆底盘的悬架高度,以达到提高对车辆底盘悬架高度调节的精确度和用户驾驶的舒适度的效果。
2、第一方面,提供一种底盘自适应调节方法,该方法包括:
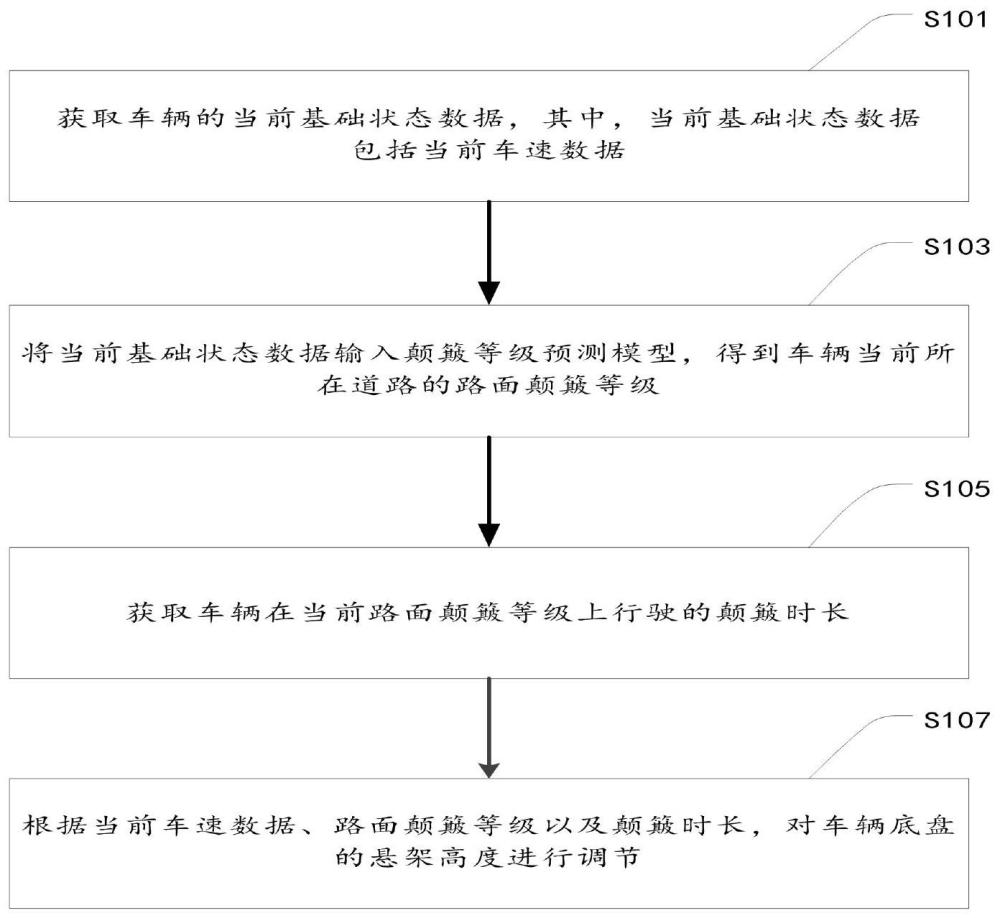
3、获取车辆的当前基础状态数据,其中,当前基础状态数据包括当前车速数据;
4、将当前基础状态数据输入颠簸等级预测模型,得到车辆当前所在道路的路面颠簸等级;
5、获取车辆在当前路面颠簸等级上行驶的颠簸时长;
6、根据当前车速数据、路面颠簸等级以及颠簸时长,对车辆底盘的悬架高度进行调节。
7、根据本技术实施例中一种可实现的方式,颠簸等级预测模型的训练过程包括:
8、获取车辆的基础状态数据样本;
9、对基础状态数据样本进行特征提取,得到样本特征数据;
10、对样本特征数据进行归一化处理,得到样本归一化数据;
11、通过样本归一化数据对神经网络模型进行模型训练,得到颠簸等级预测模型。
12、根据本技术实施例中一种可实现的方式,根据当前车速数据、路面颠簸等级以及颠簸时长,对车辆底盘的悬架高度进行调节,包括:
13、实时获取车辆的当前车速数据,将当前车速数据和第一预设速度阈值进行比对;
14、若当前车速数据大于第一预设速度阈值,则根据当前车速数据对车辆底盘的悬架高度进行调节;
15、若当前车速数据小于或等于第一预设速度阈值,则结合路面颠簸等级以及颠簸时长,对车辆底盘的悬架高度进行调节。
16、根据本技术实施例中一种可实现的方式,悬架高度包括第一悬架高度、第二悬架高度以及第三悬架高度,第一悬架高度、第二悬架高度以及第三悬架高度依次增高;若当前车速数据大于第一预设速度阈值,则根据当前车速数据对车辆底盘的悬架高度进行调节,包括:
17、若当前车速数据大于第一预设速度阈值,则将当前车速数据和第二预设速度阈值进行比对,第二预设速度阈值大于第一预设速度阈值;
18、若当前车速数据大于第二预设速度阈值,则根据当前车速数据对车辆底盘的悬架高度进行调节;
19、若当前车速数据小于或等于第二预设速度阈值,则将车辆底盘的悬架高度调节为第二悬架高度。
20、根据本技术实施例中一种可实现的方式,若当前车速数据大于第二预设速度阈值,则根据当前车速数据对车辆底盘的悬架高度进行调节,包括:
21、若当前车速数据大于第二预设速度阈值,则将当前车速数据和第三预设速度阈值进行比对,第三预设速度阈值大于第二预设速度阈值;
22、若当前车速数据大于第三预设速度阈值,则将车辆底盘的悬架高度调节为第一悬架高度;
23、若当前车速数据小于或等于第三预设速度阈值,则将车辆底盘的悬架高度调节为第二悬架高度。
24、根据本技术实施例中一种可实现的方式,路面颠簸等级包括一级颠簸路面、二级颠簸路面、三级颠簸路面以及四级颠簸路面,一级颠簸路面、二级颠簸路面、三级颠簸路面以及四级颠簸路面的颠簸程度依次增大;若当前车速数据小于或等于第一预设速度阈值,则结合路面颠簸等级以及颠簸时长,对车辆底盘的悬架高度进行调节,包括:
25、若当前车速数据小于或等于第一预设速度阈值,则获取车辆当前所在道路的路面颠簸等级;
26、判断车辆当前所在道路的路面颠簸等级是否是一级颠簸路面;
27、若是一级颠簸路面,则将车辆底盘的悬架高度调节为第二悬架高度;
28、若非一级颠簸路面,则结合颠簸时长,对车辆底盘的悬架高度进行调节。
29、根据本技术实施例中一种可实现的方式,若非一级颠簸路面,则结合颠簸时长,对车辆底盘的悬架高度进行调节,包括:
30、获取车辆的当前车速数据,将当前车速数据和最低预设速度阈值进行比对,最低预设速度阈值小于第一预设速度阈值;
31、若当前车速数据大于最低预设速度阈值,则判断车辆当前所在道路的路面颠簸等级是否是二级颠簸路面;
32、若是二级颠簸路面,则将车辆底盘的悬架高度调节为第二悬架高度;
33、若非二级颠簸路面,则结合颠簸时长,对车辆底盘的悬架高度进行调节。
34、根据本技术实施例中一种可实现的方式,若非二级颠簸路面,则结合颠簸时长,对车辆底盘的悬架高度进行调节,包括:
35、判断车辆当前所在道路的路面颠簸等级是否是四级颠簸路面;
36、若非四级颠簸路面,则将车辆底盘的悬架高度调节为第二悬架高度;
37、若是四级颠簸路面,则结合颠簸时长,对车辆底盘的悬架高度进行调节。
38、根据本技术实施例中一种可实现的方式,若是四级颠簸路面,则结合颠簸时长,对车辆底盘的悬架高度进行调节,包括:
39、获取车辆在当前路面颠簸等级上行驶的颠簸时长,将颠簸时长和第一预设时间进行比对;
40、若颠簸时长大于第一预设时间,则将车辆底盘的悬架高度调节为第三悬架高度;
41、若颠簸时长小于或等于第一预设时间,则将车辆底盘的悬架高度调节为第二悬架高度。
42、根据本技术实施例中一种可实现的方式,将当前车速数据和最低预设速度阈值进行比对,还包括:
43、若当前车速数据小于或等于最低预设速度阈值,则判断车辆当前所在道路的路面颠簸等级是否是二级颠簸路面;
44、若是二级颠簸路面,则获取车辆在当前路面颠簸等级上行驶的颠簸时长,以及将颠簸时长和第二预设时间进行比对;
45、若颠簸时长大于第二预设时间,则将车辆底盘的悬架高度调节为第三悬架高度;
46、若颠簸时长小于或等于第二预设时间,则将车辆底盘的悬架高度调节为第二悬架高度。
47、根据本技术实施例中一种可实现的方式,则判断车辆当前所在道路的路面颠簸等级是否是二级颠簸路面,还包括:
48、若非二级颠簸路面,则获取车辆在当前路面颠簸等级上行驶的颠簸时长;
49、将颠簸时长和第一预设时间进行比对,第一预设时间小于第二预设时间;
50、若颠簸时长大于第一预设时间,则将车辆底盘的悬架高度调节为第三悬架高度;
51、若颠簸时长小于或等于第一预设时间,则将车辆底盘的悬架高度调节为第二悬架高度。
52、第二方面,提供了一种底盘自适应调节装置,该装置包括:
53、基础状态数据获取模块,用于获取车辆的当前基础状态数据,其中,当前基础状态数据包括当前车速数据;
54、路面颠簸等级识别模块,用于将当前基础状态数据输入颠簸等级预测模型,得到车辆当前所在道路的路面颠簸等级;
55、颠簸时长获取模块,用于获取车辆在当前路面颠簸等级上行驶的颠簸时长;
56、自适应调节模块,用于根据当前车速数据、路面颠簸等级以及颠簸时长,对车辆底盘的悬架高度进行调节。
57、第三方面,提供了一种计算机设备,包括:
58、至少一个处理器;以及
59、与至少一个处理器通信连接的存储器;其中,
60、存储器存储有可被至少一个处理器执行的计算机指令,计算机指令被至少一个处理器执行,以使至少一个处理器能够执行上述第一方面中涉及的方法。
61、第四方面,提供了一种计算机可读存储介质,其上存储有计算机指令,其特征在于,计算机指令用于使计算机执行上述第一方面中涉及的方法。
62、根据本技术实施例所提供的技术内容,通过获取车辆的当前基础状态数据,其中,当前基础状态数据包括当前车速数据;将当前基础状态数据输入颠簸等级预测模型,得到车辆当前所在道路的路面颠簸等级;获取车辆在当前路面颠簸等级上行驶的颠簸时长;根据当前车速数据、路面颠簸等级以及颠簸时长,对车辆底盘的悬架高度进行调节。上述操作,结合车速、路面颠簸等级和颠簸时长等多方面的因素,动态自适应调节车辆底盘的悬架高度,以达到提高对车辆底盘悬架高度调节的精确度和用户驾驶的舒适度的效果。
- 还没有人留言评论。精彩留言会获得点赞!