车载激光雷达清洗装置及具有其的车辆的制作方法
1.本实用新型涉及雷达装置技术领域,尤其是一种车载激光雷达清洗装置及具有其的车辆。
背景技术:
2.随着智能汽车以及自动驾驶技术的迅速发展,辅助驾驶以及自动驾驶的相关功能已经逐渐成为智能汽车当中所不可或缺的重要功能。环境感知作为自动驾驶技术当中的核心模块,提供了自动驾驶车辆对周边环境以及障碍物的感知能力。激光雷达由于在探测精度方面的优势,正在成为自动驾驶系统技术方案中,目标感知以及高精度定位的重要感知传感器之一。激光雷达作为自动驾驶系统的传感器设备,目前主流布置方案是布置于前保险杠大灯附近或者是车辆的顶部。为了满足其探测要求,在应用的过程中,通常需要将激光雷达的探测表面裸露在环境中,因此,环境中的灰尘,泥污,飞虫等物体会粘附在激光雷达探测面的表面。从而对激光雷达的激光束的发射产生影响,导致其对目标的探测能力下降,从而无法得到准确的测量结果,从而影响自动驾驶汽车的安全性。因此,如何有效快速地清除激光雷达探测面的各种表面污渍,是一项车辆生产厂商及实验室亟待解决的问题。
技术实现要素:
3.本实用新型提供了一种车载激光雷达清洗装置及具有其的车辆,该车载激光雷达清洗装置能够简单高效地对车载激光雷达进行清洗。
4.本实用新型提供了一种车载激光雷达清洗装置,包括进气道及第一喷液装置,所述进气道上设置有进气口及出气口,所述进气口的朝向与车辆的前进方向相同,所述出气口与车载激光雷达的位置相适应,所述第一喷液装置与所述进气道连通,并在对所述车载激光雷达进行清洗时将清洗液喷射于所述进气道内。
5.进一步的,所述第一喷液装置的喷液出口朝向所述进气道的出气口方向,且所述第一喷液装置的喷液出口的轴线与所述进气道形成有夹角。
6.进一步的,所述车载激光雷达清洗装置还包括对所述车载激光雷达上的污物进行检测的检测装置、警报装置、控制开关及控制单元,所述检测装置与所述警报装置电性相连,当所述检测装置检测到所述车载激光雷达上的污物时,所述警报装置发出警报,所述控制开关及所述第一喷液装置与所述控制单元电性相连,当所述控制单元接收到所述控制开关发出的清洗信号时,控制所述第一喷液装置喷出清洗液。
7.进一步的,所述第一喷液装置包括第一喷头及第一控制阀,所述第一喷头与所述玻璃水箱相连,所述第一控制阀设置于所述第一喷头与所述玻璃水箱之间,所述第一控制阀与所述控制单元电性相连,所述控制单元通过所述第一控制阀对所述第一喷液装置进行控制。
8.进一步的,所述车载激光雷达清洗装置还包括第二喷液装置及采集车辆行驶速度的车速传感器,所述第二喷液装置及所述车速传感器均与所述控制单元相连,所述第二喷
液装置的位置与所述车载激光雷达的位置相适应,每一在开启时将清洗液喷射于所述车载激光雷达上;当所述控制单元接收到清洗信号,且车速大于设定车速时,开启第一喷液装置对所述车载激光雷达进行清洗,当所述控制单元接收到清洗信号,且车辆速度小于设定速度时,开启所述第二喷液装置对所述车载激光雷达进行清洗。
9.进一步的,所述第一喷液装置及所述第二喷液装置分别设置于所述车载激光雷达的两个相邻的侧边上。
10.进一步的,所述第一喷液装置包括第一喷头及第一控制阀,所述第二喷液装置包括第二喷头及第二控制阀,所述第一喷头及所述第二喷头与所述玻璃水箱相连,所述第一控制阀设置于所述第一喷头与所述玻璃水箱之间,所述第二控制阀设置于所述第二喷头与所述玻璃水箱之间,所述第一控制阀及所述第二控制阀与所述控制单元电性相连,所述控制单元通过所述第一控制阀及所述第二控制阀分别对所述第一喷液装置及所述第二喷液装置进行控制。
11.本实用新型还提供了一种车辆,包括上述的车载激光雷达清洗装置。
12.进一步的,所述车载激光雷达清洗装置的进气道集成于所述车辆的前保险杠内,并位于左侧和/或右侧大灯下方。
13.综上所述,在本实施例中,通过进气道的设置,并使第一喷液装置与进气道相连,在进行车载激光雷达清洗装置的清洗时,第一喷液装置将清洗液喷射于进气道内,由于进气道的进气口朝向与车辆的前进方向相同,因此,在通过控制开关开启第一喷液装置时,随着车辆的行进,进气道内会产生气流,清洗液与气流充分混合后,形成雾化的清洗液与空气的混合物,该混合物喷向车载激光雷达上,会对车载激光雷达形成较好的清洗效果;进一步地,在未主动开启第一喷液装置时,由于进气道内同样会形成气流,该气流能够在车载激光雷达的表面上形成一层流动的空气膜,该空气膜可以防止灰尘附着,同时也能够将一些微小的灰尘颗粒从车载激光雷达的表面吹下。进一步地,通过第二喷液装置的设置,能够根据车速的不同启用不同的喷液装置,以更好地对车载激光雷达上的污物进行清洗。
14.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
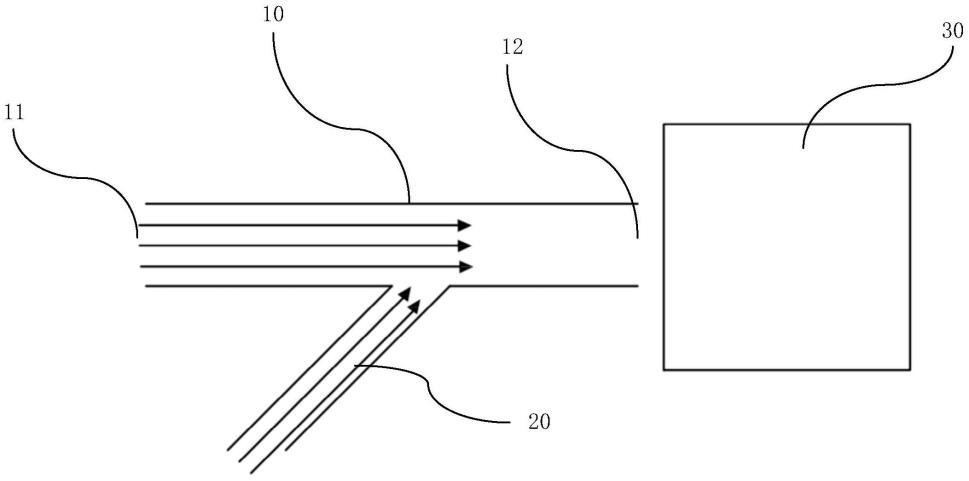
15.图1所示为本实用新型第一实施例提供的车载激光雷达清洗装置的结构示意图。
16.图2所示为图1中车载激光雷达清洗装置的系统框图。
17.图3所示为图1中第一喷液装置与玻璃水箱的连接结构示意图。
18.图4所示为本实用新型第二实施例提供的车载激光雷达清洗装置的结构示意图。
19.图5所示为图4中车载激光雷达清洗装置的系统框图。
20.图6所示为图4中第一喷液装置及第二喷液装置与玻璃水箱的连接结构示意图。
具体实施方式
21.为更进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对本实用新型进行详细说明如下。
22.本实用新型提供了一种车载激光雷达清洗装置及具有其的车辆,该车载激光雷达清洗装置能够简单高效地对车载激光雷达进行清洗。
23.图1所示为本实用新型第一实施例提供的车载激光雷达清洗装置的结构示意图。如图1所示,本实用新型第一实施例提供的车载激光雷达清洗装置包括进气道10及第一喷液装置20,进气道10上设置有进气口11及出气口 12,进气口11的朝向与车辆的前进方向相同,出气口12与车载激光雷达30 的位置相适应,第一喷液装置20与进气道10连通,并在对车载激光雷达30 进行清洗时将清洗液喷射于进气道10内。
24.在本实施例中,通过进气道10的设置,并使第一喷液装置20与进气道 10相连,在进行车载激光雷达清洗装置的清洗时,第一喷液装置20将清洗液喷射于进气道10内,由于进气道10的进气口11朝向与车辆的前进方向相同,因此,在通过控制开关开启第一喷液装置20时,随着车辆的行进,进气道10内会产生气流,清洗液与气流充分混合后,形成雾化的清洗液与空气的混合物,该混合物喷向车载激光雷达30上,会对车载激光雷达30形成较好的清洗效果;进一步地,在未主动开启第一喷液装置20时,由于进气道 10内同样会形成气流,该气流能够在车载激光雷达30的表面上形成一层流动的空气膜,该空气膜可以防止灰尘附着,同时也能够将一些微小的灰尘颗粒从车载激光雷达30的表面吹下。因此,该车载激光雷达清洗装置能够简单高效地对车载激光雷达30进行清洗。
25.在本实施例中,进气道10可以集成于车辆前保险杠内,并位于左侧和/ 或右侧大灯的下方,以利于在车辆行驶时,空气进入进气道10内,形成气流。在进气道10的进气口11处还可以设置有滤网(图未示出),以对进入的气流进行过滤。
26.请继续参照图1,第一喷液装置20的喷液出口朝向进气道10的出气口 12方向,且第一喷液装置20的喷液出口的轴线与进气道10形成有夹角,以使第一喷液装置20喷出的清洗液能够较好地与气流进行混合。在本实施例中,第一喷液装置20可以与玻璃水箱40相连,也即,清洗液为玻璃水,以利用车辆原有的玻璃水箱40,降低成本。
27.图2所示为图1中车载激光雷达清洗装置的系统框图,图3所示为图1 中第一喷液装置与玻璃水箱的连接结构示意图。如图2及图3所示,在本实施例中,该装置还包括对车载激光雷达30上的污物进行检测的检测装置51、警报装置52、控制开关53及控制单元54,该检测装置51可以为外接的电性的监控装置,如视觉检测装置51,以实现对车载雷达表面的污物检测,或者可以为车载激光雷达30自身的检测模块。关于视觉检测污物以及车载激光雷达30自身的污物检测模块可以参见现有技术,在此不再赘述。该检测装置 51与警报装置52电性相连,当检测装置51检测到车载激光雷达上的污物时,警报装置52发出警报,控制开关53及第一喷液装置20与控制单元54电性相连,当控制单元54接收到控制开关53发出的清洗信号时,控制第一喷液装置20喷出清洗液。
28.更为具体地,在本实施例中,第一喷液装置20包括第一喷头21与第一控制阀22,第一喷头21与玻璃水箱40相连,第一控制阀22设置于第一喷头21与玻璃水箱40之间,第一控制阀22与控制单元54电性相连。控制单元54通过第一控制阀22对第一喷液装置20进行控制。
29.图4所示为本实用新型第二实施例提供的车载激光雷达清洗装置的结构示意图,图5所示为图4中车载激光雷达清洗装置的系统框图,图6所示为图4中第一喷液装置及第二喷液装置与玻璃水箱的连接结构示意图。如图2 至图4所示,本实用新型第二实施例提供的
车载激光雷达清洗装置与第一实施例基本相同,其不同之处在于,在本实施例中,车载激光雷达清洗装置还设置有第二喷液装置60及采集车辆行驶速度的车速传感器55,第二喷液装置60及车速传感器55均与控制单元54相连,第二喷液装置60的位置与车载激光雷达30的位置相适应,以在开启时将清洗液喷射于车载激光雷达30 上。优选地,第一喷液装置20及第二喷液装置60分别设置于车载激光雷达 30的两个相邻的侧边上。当控制单元54接收到清洗信号,且车辆速度大于设定速度,如45km/h时,开启第一喷液装置20对车载激光雷达30进行清洗,当控制单元54接收到清洗信号,且车辆速度小于设定速度时,开启第二喷液装置60对车载激光雷达30进行清洗。
30.在本实施例中,通过第一喷液装置20及第二喷液装置60的设置,使得第一喷液装置20与进气道10相连,第二喷液装置60的位置与车载激光雷达 30的位置相适应,在车速较高时,由于进气道10的气流较大,因此,第二喷液装置60喷出的清洗液较为容易被雾化,以进行车载激光雷达30的清洗,而当车速较小时,由于进气道10气流较小,可能无法将第一喷液装置60喷出的清洗液彻底雾化,因此,第二喷液装置60直接将清洗液喷射于车载激光雷达30上,能够更好地对车载激光雷达30进行清洗。
31.进一步地,请参见图6,第二喷液装置60包括第二喷头61及第二控制阀62,第二控制阀62与控制单元54电性相连,控制单元54通过第一控制阀22及第二控制阀62对第一喷液装置20及第二喷液装置60进行控制。
32.综上所述,在本实施例中,通过进气道10的设置,并使第一喷液装置 20与进气道10相连,在进行车载激光雷达清洗装置的清洗时,第一喷液装置20将清洗液喷射于进气道10内,由于进气道10的进气口11朝向与车辆的前进方向相同,因此,在通过控制开关53开启第一喷液装置20时,随着车辆的行进,进气道10内会产生气流,清洗液与气流充分混合后,形成雾化的清洗液与空气的混合物,该混合物喷向车载激光雷达30上,会对车载激光雷达30形成较好的清洗效果;进一步地,在未主动开启第一喷液装置20 时,由于进气道10内同样会形成气流,该气流能够在车载激光雷达30的表面上形成一层流动的空气膜,该空气膜可以防止灰尘附着,同时也能够将一些微小的灰尘颗粒从车载激光雷达30的表面吹下。进一步地,通过第二喷液装置60的设置,能够根据车速的不同启用不同的喷液装置,以更好地对车载激光雷达30上的污物进行清洗。
33.本实用新型还提供了一种车辆,该车辆包括上述的车载激光雷达清洗装置,关于该车辆的其它技术特征,请参见现有技术,在此不再赘述。
34.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1