一种多功能装载车
1.本实用新型属于搬运设备技术领域,特别涉及一种多功能装载车。
背景技术:
2.货物搬运是指在运输生产过程中,对货物进行短距离移动作业的总称,是运输生产过程的重要组成部分。货物搬运主要包括:将货物进行码放、堆垛等有关作业的货物堆码作业、将货物送进保管场所或从保管场所取出的货物进出作业、将货物按品种、发货方向、货主需求等进行分类货物分类作业。
3.国内众多中小型制造工厂厂房面积不大,车间数量却多,日均材料、设备运输量达1000吨级,而目前以传统叉车为代表的厂运车辆大多数情况下仅能叉起运输大体积货物,且对运输过道宽度有一定要求,而对于零散货物的搬运和运输较为困难,需要人工进行码垛或装车。
4.目前零散货物搬运大多是采用人工驾驶的装载机进行夹持搬运或者起吊搬运,搬运模式单一,对于一些需要配合搬运的货物需要两台机器或者人为进行辅助搬运,费时费力。
技术实现要素:
5.针对上述存在的问题,本实用新型的目的是提供一种多功能装载车,可以分别通过夹持装置或铲升装置进行货物装载,并且夹持装置和铲升装置可以互相配合进行货物搬运和装载。
6.本实用新型的技术方案是:一种多功能装载车,包括:
7.车体,底部设有驱动系统;
8.货箱,设置在所述车体上方前部;
9.夹持装置,通过旋转底座设置在所述车体上方后部,包括多个第一支撑臂和设置在所述第一支撑臂远端的夹爪,每两个所述第一支撑臂之间铰接并通过第一伺服电机驱动转动;
10.铲升装置,通过旋转底座设置在所述车体上方后部,且所述铲升装置与所述夹持装置平行,包括多个第二支撑臂和设置在所述第二支撑臂远端的铲斗,每两个所述第二支撑臂之间铰接并通过第二伺服电机驱动转动。
11.进一步地,所述驱动系统包括四个安装在车体底部的四个驱动轮,每个所述驱动轮分别通过一个直流伺服电机驱动。
12.进一步地,每个所述驱动轮与车体连接处分别设有减震单元。
13.进一步地,还包括控制系统,所述控制系统包括设置在车体底部的单片机和无线通信模块。
14.进一步地,所述车体侧面还设有传感检测单元,所述传感检测单元包括设置在车体侧面的多个超声波传感器和设置在车体前侧端的两个灰度传感器,两个所述灰度传感器
分别设置在位于车体前侧端的两个驱动轮上方。
15.进一步地,所述夹爪由气动控制张开和闭合。
16.进一步地,所述第一支撑臂、第二支撑臂均可伸缩。
17.进一步地,所述驱动系统、夹持装置和铲升装置均内置蓝牙模块,所述蓝牙模块分别通过所述无线通信模块与单片机连接,可以达到单独控制或者多个同时控制的目的,维修更简单,控制延迟更短。
18.本实用新型的工作方法:操作人员通过蓝牙连接无线通信模块对多功能装载车的驱动系统、夹持装置和铲升装置进行控制,通过单片机控制驱动系统使多功能装载车达到前进、后退、转弯、避障等动作,通过单片机控制夹持装置和铲升装置进行清除障碍、货物夹装、货物铲装或卸货等操作,当多功能装载车去装货途中,如果超声波传感器检测到障碍物,单片机控制驱动系统的驱动轮转弯达到避障效果,如果障碍不可躲避,则操作人员可以根据障碍物大小通过控制夹持装置或铲升装置将障碍物挪移,用夹持装置装货时,通过旋转底座配合第一支撑臂将夹爪送至合适位置,夹爪通过气动张开,再通过气动夹住货物,通过第一支撑臂将夹住的货物抬升一定高度,第一支撑臂带动货物旋转至货箱上方,第一支撑臂将夹住的货物放进货箱,夹爪通过气动张开放开货物,第一支撑臂归位,完成装货流程;用铲升装置装货时,通过旋转底座配合第二支撑臂将铲斗送至合适位置,通过第二支撑臂将货物铲起抬升一定高度,第二支撑臂带动货物旋转至货仓上方,第二支撑臂将货物放进货箱,第二支撑臂归位,完成装货流程;夹持装置和铲升装置可同时进行上述操作。
19.与现有技术相比,本实用新型的有益效果在于:本实用新型提供的一种多功能装载小车,具有结构简单、装载灵活方便、承载能力较大、维修简单、延迟低、可以在狭窄空间原地转向,能自动避开障碍物等优点,并且通过单独设置的夹持装置和铲升装置进行货物装载,还可以组合进行货物装载,可短时间自行运行,由控制系统执行事先编好的程序,解决操作人员短时间不在而停止运行的问题,可广泛应用于各种类型的工厂零部件,原材料的装载及运输,如仓库与车间往返运输材料及小型工件或配合厂房航车转运设备过跨之用。
附图说明
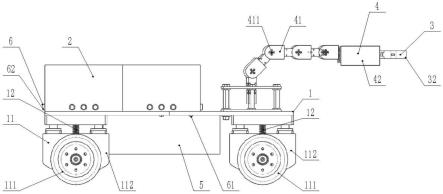
20.图1为本实用新型的主视图;
21.图2是本实用新型的俯视图。
22.其中,1-车体、11-驱动系统、111-驱动轮、112-直流伺服电机、12-减震单元、2-货箱、3-夹持装置、31-第一支撑臂、311-第一伺服电机、32-夹爪、4-铲升装置、41-第二支撑臂、411-第二伺服电机、42-铲斗、5-控制系统、6-传感检测单元、61-超声波传感器、62-灰度传感器。
具体实施方式
23.下面结合附图,对本实用新型的具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
24.实施例:如图1-2所示,一种多功能装载车,包括车体1、货箱2、夹持装置3、铲升装置4、控制系统5和传感检测单元6。其中,车体1底部设有驱动系统11,驱动系统11包括四个
安装在车体1底部的四个驱动轮111,每个驱动轮111分别通过一个直流伺服电机112驱动,每个驱动轮111与车体1连接处分别设有减震单元12;货箱2设置在车体1上方前部;夹持装置3通过旋转底座设置在车体1上方后部,包括多个第一支撑臂31和设置在第一支撑臂31远端的夹爪32,每两个第一支撑臂31之间铰接并通过第一伺服电机311驱动转动,第一支撑臂31可伸缩,夹爪32由气动控制张开和闭合;铲升装置4通过旋转底座设置在车体1上方后部,且铲升装置4与夹持装置3平行,包括多个第二支撑臂41和设置在第二支撑臂41远端的铲斗42,每两个第二支撑臂41之间铰接并通过第二伺服电机411驱动转动,第二支撑臂41可伸缩;控制系统5包括设置在车体1底部的单片机和无线通信模块,驱动系统11、夹持装置3和铲升装置4均内置蓝牙模块,蓝牙模块分别通过所述无线通信模块与单片机连接;传感检测单元6包括设置在车体1侧面的多个超声波传感器61和设置在车体1前侧端的两个灰度传感器62,两个灰度传感器62分别设置在位于车体1前侧端的两个驱动轮111上方。
25.上述实施例的工作方法是:操作人员通过蓝牙连接无线通信模块对多功能装载车进行控制,通过单片机控制驱动系统11使多功能装载车达到前进、后退、转弯、避障等动作,通过单片机控制夹持装置3和铲升装置4进行清除障碍、货物夹装、货物铲装或卸货等操作,当多功能装载车去装货途中,如果超声波传感器61检测到障碍物,单片机控制驱动系统11的驱动轮111转弯达到避障效果,如果障碍不可躲避,则操作人员可以根据障碍物大小通过控制夹持装置3或铲升装置4将障碍物挪移,用夹持装置3装货时,通过旋转底座配合第一支撑臂31将夹爪32送至合适位置,夹爪32通过气动张开,再通过气动夹住货物,通过第一支撑臂31将夹住的货物抬升一定高度,第一支撑臂31带动货物旋转至货箱2上方,第一支撑臂31将夹住的货物放进货箱2,夹爪32通过气动张开放开货物,第一支撑臂31归位,完成装货流程;用铲升装置4装货时,通过旋转底座配合第二支撑臂41将铲斗42送至合适位置,通过第二支撑臂41将货物铲起抬升一定高度,第二支撑臂41带动货物旋转至货仓上方,第二支撑臂41将货物放进货箱2,第二支撑臂41归位,完成装货流程,夹持装置3或铲升装置4可同时进行上述操作。
26.上述电子元件的具体型号未作特殊指定,均可以选用市售的普通产品,只要能够满足本实用新型的使用需求即可。
27.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1