一种用于飞行汽车的智能动力系统
1.本实用新型属于飞行汽车动力技术领域,尤其涉及一种用于飞行汽车的智能动力系统。
背景技术:
2.目前,随着经济的快速发展,汽车的使用已日渐普及,甚至一些家庭不止拥有一辆汽车,地面车辆的普及紧随带来的是城市道路交通拥堵的问题。
3.为了解决这个问题,出现多种类型飞行汽车,按照动力系统总体可分为纯油动或纯电动。纯电动飞行时噪音较小,但限于当今电池技术发展瓶颈的问题,使得纯电动飞行汽车航程较短。如何最大化的利用电能成为一个新的问题。
4.电池组的巨大重量和较高的成本决定了仅仅堆电池并不是明智的选择。提高驱动效率是电池技术没有巨大进展的情况下,提高续航的关键。
技术实现要素:
5.针对当今电池技术发展瓶颈的问题,本实用新型的目的在于克服现有技术缺陷,提出了一种用于飞行汽车的智能动力系统,用于提高纯电动飞行汽车航程。
6.为了实现上述目的,本实用新型提出了一种用于飞行汽车的智能动力系统,所述系统包括:飞行动力模块、地面动力模块和辅助控制模块;其中,
7.所述飞行动力模块,采用同轴双电机模式,用于为飞行汽车的飞行部件提供动力;
8.所述地面动力模块,采用高速电机和低速电机的双电机驱动方式,用于为飞行汽车的地面行驶部件提供动力;
9.所述辅助控制模块,用于回收地面行驶部件产生的机械能转换为电能供飞行汽车的电源管理系统使用,还用于将采集的飞行动力模块和地面动力模块的数据发送至飞行汽车的主控系统。
10.作为上述系统的一种改进,所述飞行动力模块包括四个上电机、四个下电机、四个第一电子调速器和四个第二电子调速器;每个肘臂上均部署一个上电机、一个下电机,一个第一电子调速器和一个第二电子调速器;其中,
11.所述第一电子调速器,用于根据主控系统的电信号控制上电机进行转动;第一电子调速器的一端与主控系统通信,另一端与上电机通信;
12.所述第二电子调速器,用于根据主控系统的电信号控制下电机进行转动;第二电子调速器的一端与主控系统通信,另一端与下电机通信;
13.每个上电机的一端与第一电子调速器通信,另一端与辅助控制模块通信;
14.每个下电机的一端与第二电子调速器通信,另一端与辅助控制模块通信。
15.作为上述系统的一种改进,每个所述上电机的转速小于下电机的转速,两个电机转轴安装相同规格的螺旋桨。
16.作为上述系统的一种改进,所述地面动力模块包括高速电机、低速电机、第一驱动
器和第二驱动器;其中,
17.所述第一驱动器,用于根据主控系统的电信号控制高速电机转动;第一驱动器的一端与主控系统通信,另一端与高速电机通信;
18.所述第二驱动器,用于根据主控系统的电信号控制低速电机转动;第二驱动器的一端与主控系统通信,另一端与低速电机通信;
19.所述高速电机的一端与第一驱动器通信,另一端与辅助控制模块通信;
20.所述低速电机的一端与第二驱动器通信,另一端与辅助控制模块通信。
21.作为上述系统的一种改进,所述辅助控制模块包括能量回收单元,用于回收地面行驶部件产生的机械能,并转化为电能供电源管理系统使用;还用于同时产生负载作用,为驱动轮提供阻力;
22.所述能量回收单元的一端与地面动力模块的高速电机和低速电机连接,另一端与电源管理系统连接;
23.作为上述系统的一种改进,所述辅助控制模块包括数据采集卡,用于实时采集每个电机的转速、飞行汽车姿态以及车轮转速,将采集信息转化成电信号并发送至主控系统;
24.所述数据采集卡的一端分别与飞行动力模块的四个上电机和四个下电机以及地面动力模块的高速电机和低速电机通信,另一端与主控系统通信。
25.与现有技术相比,本实用新型的优势在于:
26.1、飞行动力模块采用同轴上下双电机方法提高驱动效率;
27.2、地面动力模块采用高速电机和低速电机的双电机驱动方法,降低了飞行汽车总重量、提高能量回收效率、提高驱动效率;
28.3、辅助控制模块的能量回收单元将机械能转化为电能,然后供电源管理系统使用,能量回收单元在回收机械能的同时也产生负载作用,作为驱动轮阻力,提高了驱动效率;
29.4、本实用新型能够提高飞行汽车的驱动效率,提高飞行汽车的航程,同时避免飞行汽车本身质量增加过多的问题。
附图说明
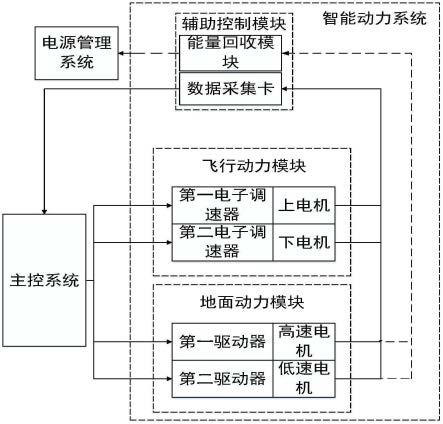
30.图1是本实用新型用于飞行汽车的智能动力系统组成框图;
31.图2是飞行汽车的外观示意图。
32.附图标记
33.1、上电机
ꢀꢀꢀꢀꢀꢀꢀ
2、下电机
ꢀꢀꢀꢀꢀꢀꢀ
3、第一电子调速器
ꢀꢀ
4、第二电子调速器
34.5、高速电机
ꢀꢀꢀꢀꢀ
6、低速电机
ꢀꢀꢀꢀꢀ
7、第一驱动器
ꢀꢀꢀꢀꢀꢀ
8、第二驱动器
35.9、能量回收单元 10、数据采集卡
ꢀꢀ
11、肘臂
具体实施方式
36.针对相关技术中的飞行汽车续航较短、整体质量过大问题,本实用新型提出一种飞行汽车的智能动力系统,能够提高飞行汽车的驱动效率,提高飞行汽车的航程,同时避免飞行汽车本身质量增加过多的问题。
37.一种飞行汽车的智能动力系统,包括飞行动力模块、地面动力模块、辅助控制模
块。
38.辅助控制模块的数据采集卡实时采集电机转速、飞行汽车姿态、车轮转速,将这些信息通过电信号传给主控系统,主控系统根据人机交互装置和数据采集卡的电信号对飞行动力模块和地面动力模块的电机做出控制。
39.辅助控制模块的能量回收单元将机械能转化为电能,然后供电源管理系统使用。能量回收单元在回收机械能的同时也产生负载作用,作为驱动轮阻力,提高了驱动效率。
40.飞行动力模块采用同轴双电机的方法,提高了驱动效率。
41.地面动力模块采用高速电机和低速电机的双电机驱动方法,降低了飞行汽车总重量、提高了能量回收效率、提高了驱动效率。高速电机和低速电机属于本领域公知常识,相比采用单电机工作模式,采用两种速率不同的电机,能够通过不同的搭配,使系统高速率区间大大扩大,提升在高速轻载等情况下的效率。
42.下面结合附图和实施例对本实用新型的技术方案进行详细的说明。
43.实施例
44.如图1所示,本实用新型提供了一种飞行汽车的智能动力系统,包括飞行动力模块、地面动力模块、辅助控制模块。具体介绍如下:
45.1.飞行动力模块
46.飞行动力模块包括四个上电机1、四个下电机2、四个第一电子调速器3、四个第二电子调速器4,分别部署在每个肘臂11。
47.1.1上电机
48.上电机1一端与第一电子调速器3通信,一端与辅助控制模块通信。
49.1.2下电机
50.下电机2一端与第二电子调速器4通信,一端与辅助控制模块通信。
51.1.3第一电子调速器3
52.第一电子调速器3一端与主控系统通信,一端与上电机1通信。
53.1.4第二电子调速器4
54.第二电子调速器4一端与主控系统通信,一端与下电机2通信。
55.2.地面动力模块
56.地面动力模块包括高速电机5、低速电机6、第一驱动器7,第二驱动器8。
57.2.1高速电机
58.高速电机5一端与第一驱动器7通信,一端与辅助控制模块通信。
59.2.2低速电机
60.低速电机6一端与第二驱动器8通信,一端与辅助控制模块通信。
61.2.3第一驱动器
62.第一驱动器7一端与主控系统通信,一端与高速电机5通信。
63.2.4第二驱动器
64.第二驱动器8一端与主控系统通信,一端与低速电机6通信。
65.3.辅助控制模块
66.辅助控制模块包括能量回收单元9、数据采集卡10。
67.3.1能量回收单元
68.能量回收单元9一端与飞行动力模块和地面动力模块的电机连接,一端与电源管理系统连接。能量回收单元回收地面动力模块电机的电能,将回收的电能传给电源管理系统。
69.3.2数据采集卡
70.数据采集卡10一端飞行动力模块和地面动力模块的电机通信,一端与主控系统通信。数据采集卡10采集飞行动力模块和地面动力模块的电机的工作电流,实际的转速,电枢的温度等数据进行实时的采集和处理,并将信息传递给主控系统。
71.图1中的实线表示通信,虚线表示能量传递。
72.当飞行汽车在陆地或空中行驶时,电源管理系统为各部分上电。人机交互装置根据用户指令形成电信号并将电信号传递到主控系统。数据采集卡10实时采集电机转速、飞行汽车姿态、车轮转速,将检测信息转化成电信号,将电信号传递给主控系统。主控系统对人机交互和数据检测卡的电信号进行处理,形成对飞行动力模块和地面动力模块控制的电信号。第一电子调速器3、第二电子调速器4根据主控系统的电信号分别控制上电机1、下电机2进行转动。第一驱动器7、第二驱动器8根据主控系统的电信号分别控制高速电机5、低速电机6进行转动。
73.当飞行汽车在地面进行制动时,地面动力模块正在运转的电机将机械能输出到能量回收单元9,能量回收单元9将机械能转化为电能,然后供电源管理系统使用。同时能量回收单元9在回收机械能的同时也产生负载作用,作为驱动轮阻力。
74.如图2所示,高速电机5和低速电机6与飞行汽车车轮连接。
75.地面动力模块采用高低速双电机的优点体现在:
76.1.电动机的高效率区间虽然比内燃机大得多,在大部分中高速工况下,电动机的效率都能很高。但是在低速重载、低速轻载、高速轻载等情况下,电动机的效率会比高效率的区间下降20~30%。双电机则可以通过不同的搭配,让系统的高效率区间大大扩大,提升在高速轻载等情况下的效率。
77.2.两台电机拥有更多的高回收效率区间,可以提高制动能量回收的效率。
78.3.单个电机要想达到更高的效率可以通过搭配多档位变速箱实现,但是如果搭配变速箱,就会有换档动力中断的问题,而使用双电机协调控制则不会出现动力中断。
79.4.通过把单个电机分解为两个电机,可以让电机的制造难度降低,总重量也可以降低。
80.如图2所示,飞行汽车的四个肘臂11是中心对称关系,肘臂上垂直安装两个功率及转速不同的电机,上电机1转速小于下电机2转速。两个电机转轴安装相同规格的螺旋桨。
81.飞行动力模块采用同轴双电机的优点体现于:
82.1.相对于单螺旋桨结构,避免了某一螺旋桨在飞行中出现损坏,飞行汽车失去平衡不能正常飞行。
83.2.相对于两个相同电机驱动双螺旋桨结构,避免了上下螺旋桨在旋转到相同位置时抵消部分升力。
84.相对于两个相同电机驱动双螺旋桨结构,降低了电机功率,在一定程度上提高飞行时间。
85.最后所应说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制。尽
管参照实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,对本实用新型的技术方案进行修改或者等同替换,都不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1