一种纯电动高地隙四驱四轮转向无人线控底盘车的制作方法
1.本实用新型涉及无人车技术领域,具体为一种纯电动高地隙四驱四轮转向无人线控底盘车。
背景技术:
2.农业机具是指在作物种植业生产过程中,所使用的各种机具,例如:播种机具,洒水机具,农药喷洒机具,犁地机具,除草机具等等,现有技术中农业机具工作时,未单独配置行走机构,一般需要通过拖拉机作为牵引设备带动农业机具向前进行作业,但拖拉机体积庞大,轮胎宽度较宽,牵引农业机具向前过程中很容易对农作物的枝、叶、果实造成损伤。
3.另外,拖拉机只能在前面或者后面挂接农业机具,这样整个设备前后方向尺寸较大,转弯掉头对前后空间的要求较高,同时拖拉机一般采用柴油作为能源,而柴油燃烧过程中会产生大量的有害气体。
技术实现要素:
4.本实用新型的目的是提供一种纯电动高地隙四驱四轮转向无人线控底盘车,可以有效解决背景技术中的问题。
5.实现上述目的的技术方案是:一种纯电动高地隙四驱四轮转向无人线控底盘车,其特征在于:包括底盘,底盘的下方设置有左右对称设置的车轮,车轮分别通过悬挂与底盘连接,车轮与悬挂之间均安装有驱动车轮转动的轮毂电机;
6.悬挂的上端与车体之间转动连接,所述车体上还安装有驱动悬挂转动从而带动车轮转向的转向驱动器。
7.进一步地,所述所述悬挂呈l形结构、竖向段垂直向下设置,车轮通过轮毂电机安装在悬挂的下部内侧,所述悬挂的上端固定连接有连接座,悬挂上端的连接座通过回转支撑与底盘转动连接,所述连接座上端伸出底盘、并与转向驱动器的输出端连接。
8.进一步地,所述转向驱动器采用电缸,每个车轮对应有一个电缸,电缸沿前后方向布置在底盘上,所述电缸的尾端铰接在车体上、伸缩端通过推臂与对应悬挂上连接座连接,所述推臂的一端与电缸的伸缩端铰接、另一端与对应悬挂上的连接座顶端固定连接。
9.进一步地,底盘包括左右对称设置的车体,车体之间连接有连接架,每个车体的下方均通过悬挂连接有两个呈前后布置的车轮。
10.进一步地,所述线控底盘车还包括安装在车架上、并用于控制车轮行走、转向的控制系统以及用于控制系统供电的供电电池,所述控制系统布置在两侧的车体上,车体上分别连接有将控制系统封闭在内的第一罩壳,供电电池包括两个电池模块,两个电池模块分别布置在第一罩壳的外侧、并与底盘连接,连接架上连接有第二罩壳,第二罩壳与第一罩壳相互连通、并相互连接,使第二罩壳与第一罩壳之间形成一个整体的密封罩壳。
11.进一步地,所述两侧的第一罩壳上分别设置有开口,第一罩壳的开口上铰接有翻盖,第一罩壳与翻盖之间设置有气弹簧,气弹簧的两端分别与第一罩壳和翻盖铰接,气弹簧
用于在翻盖处于打开状态时对翻盖形成支撑,便于对第一罩壳内的控制系统进行检修。
12.进一步地,控制系统包括总控制单元、遥控发射器、遥控接收器、二级控制单元、轮毂电机控制器、转向电机控制器、选装机具控制模块,遥控接收器连接总控制单元,轮毂电机控制器的数量与轮毂电机数量相同,每个轮毂对应连接一个轮毂电机控制器,所述转向电机控制器的数量与转向驱动器的数量相同,每个转向驱动器对应连接一个转向电机控制器,所述总控制单元分别通信连接二级控制单元和转向电机控制器,所述二级控制单元分别连接轮毂电机控制器、转向电机控制器、选装机具控制模块,选装机具控制模块用于与选装作业机具连接。
13.进一步地,所述控制系统还包括与总控制单元连接的无人驾驶系统。
14.进一步地,所述控制系统还包括与总控制单元连接的触摸屏人机交互系统。
15.本实用新型的有益效果:
16.本实用新型的底盘离地高度高于0.75米,左右车轮之间的间距大于0.85米,可以在底盘的底部挂接不同的中型作业机具,例如:中型播种机具,中型洒水机具,中型农药喷洒机具,中型犁地机具,中型除草机具等,可以满足不同的作业要求,同时节省底盘上部和侧面的空间,整体结构紧凑,占地小,具有较高的作业灵活性,相对拖拉机驱动,全电力驱动具有环保、节约能源的优点,并且结构紧凑、体积小,减小对作物的损伤。
17.本实用新型通过电池供电,电池采用三元锂电池,连续工作时间可达8小时, 不需要拖线供电,可以适应无电供应的野外作业。
18.本实用新型四轮均配置有行走驱动和转向驱动,根据路况可以选择不同的驱动形式,具有很大的灵活性和较高的行驶能力,具体为:1)无人线控底盘车的四个车轮在轮毂电机驱动下实现四驱运动,同时在转向驱动器的配合下,四个车轮还能够实现原地转向、前后阿克曼转向以及倾斜和横向行走;2)前阿克曼运动,即前两轮同步行走、转向,后两轮保持不动;3)后阿克曼运动,即后两轮同步行走、转向,前两轮保持不动;4)通过轮毂电机控制两侧车轮产生不同转速,实现差速转向。
19.本实用新型设置有无人驾驶系统,可以按设定轨迹完成农业作业,自动化水平高,降低了农民的劳动强度。
附图说明
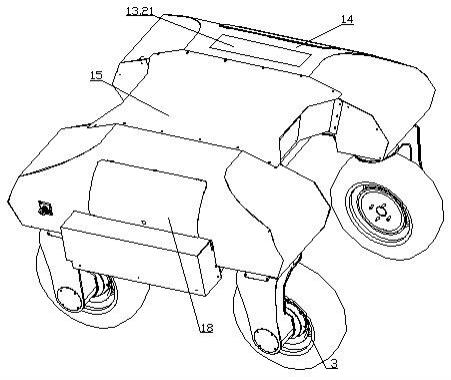
20.图1为本实用新型的立体图;
21.图2为本实用新型的俯视图;
22.图3为车轮通过悬挂与车体连接的结构示意图;
23.图4为转向驱动器与连接座的连接结构示意图;
24.图5为车轮与悬挂的连接结构示意图;
25.图6为本实用新型的控制原理图。
具体实施方式
26.如图1-6所示,本实用新型公开了一种纯电动高地隙四驱四轮转向无人线控底盘车,包括底盘1,底盘1包括左右对称设置的车体1.1,车体1.1为前后方向设置的长方体,车体1.1之间连接有连接架1.2,每个车体1.1的下方均设置有两个呈前后布置的车轮3,车轮3
分别通过悬挂2连接在对应车体1.1上,底盘1的离地高度高于0.75米,左右车轮3之间的间距大于0.85米。
27.悬挂2呈l形结构、竖向段垂直向下设置,悬挂2的上端固定连接有连接座5,悬挂2上端的连接座5分别通过回转支撑7与对应车体1.1转动连接、并且连接座5的上端向上伸出对应车体1.1、并固定设置有连接法兰5.1。
28.车体1.1上分别安装有用于驱动悬挂2转动从而带动车轮3转向的转向驱动器8,一个车轮3对应有一个转向驱动器8,同一车体1.1上的两个转向驱动器8沿长度方向布置在对应车体1.1上、并且同一车体1.1上的两个转向驱动器8的尾端相对设置。
29.进一步地,转向驱动器8采用电缸,电缸采用伺服电机驱动,电缸的尾端铰接在对应车体1.1上,伸缩端通过推臂9与对应悬挂2上的连接座5连接,所述推臂9的一端与电缸的伸缩端铰接、另一端与对应连接座5上端的连接法兰5.1通过螺栓连接。
30.转向时,转向驱动器8分别通过推臂9转动,推臂9通过连接座5驱动连接在悬挂2上的车轮3转向。
31.车轮3包括轮辋和轮胎,所示车轮3内设置有与轮辋固定连接的轮毂电机4,轮毂电机4为伺服电机,所述悬挂2下端设置有轴孔2.1,轮毂电机4的定子轴4.2穿过悬挂2的轴孔2.1后通过锁定螺母10和锁止垫盘11锁定连接,所述轮毂电机4与对应悬挂2之间的定子轴4.2上套设有定位隔套12,定位隔套12与轮毂电机4间隙配合,定位隔套12与定子轴4.2之间紧配合。
32.作为本实施例的进一步改进,所述悬挂2的轴孔2.1外端为沉孔,所述轮毂电机4的定子轴4.2的外端及锁定螺母10和锁止垫盘11均位于轴孔2.1外端的沉孔2.2内。
33.底盘1两侧的车体1.1上还安装有控制系统13,车体1.1上分别连接有将控制系统13封闭在内的第一罩壳14,第一罩壳14的外侧分别连接设置有一个电池模块16,电池模块16外设置有封闭壳体,所述电池模块16的同时与底盘1连接,连接架1.2上连接有第二罩壳15,第二罩壳15与第一罩壳14相互连通、并相互连接,使第二罩壳15与第一罩壳14之间形成一个整体的密封罩壳。
34.所述两侧的第一罩壳14上分别设置有开口,第一罩壳14的开口上铰接有翻盖18,第一罩壳14与翻盖18之间设置有气弹簧(图中未示出),气弹簧的两端分别与第一罩壳14和翻盖18铰接,气弹簧用于在翻盖18处于打开状态时对翻盖18形成支撑,便于对第一罩壳14内的控制系统13进行检修。
35.控制系统13包括无人驾驶系统13.1、触摸屏人机交互系统13.2、总控制单元13.3、遥控发射器13.4、遥控接收器13.5、二级控制单元13.6、轮毂电机控制器13.7、转向电机控制器13.8、选装机具控制模块13.9,触摸屏人机交互系统13.2的触摸屏13.21安装在第一罩壳14上,触摸屏人机交互系统13.2、总控制单元13.3分别预留最多有32个控制通道,用于作业机具的控制。
36.无人驾驶系统13.1在现有技术中已经具有很多成熟的应用,例如,可以但不限于采用专利号:201610328078.5公开的无人驾驶智能小车及控制方法 中公开的无人驾驶系统;总控制单元13.3、二级控制单元13.6、选装机具控制模块13.9可以但不限于采用stm32单片机,轮毂电机控制器13.7、转向电机控制器13.8均为伺服电机控制器。
37.所述电池模块16与除遥控发射器13.4外的控制系统13连接,用于向控制系统13供
电,电池模块16与总控制单元13.3之间连接有隔离变压器13.10,电池模块16通过隔离变压器13.10隔离变压后向总控制单元13.3供电。
38.无人驾驶系统13.1、触摸屏人机交互系统13.2、遥控接收器13.5分别连接总控制单元13.3,所述总控制单元13.3分别通信连接二级控制单元13.6和转向电机控制器13.8,所述二级控制单元13.6分别连接轮毂电机控制器13.7、转向电机控制器13.8、选装机具控制模块13.9,转向电机控制器13.8设置有四个,每个转向电机控制器13.8对应连接一个电缸,选装机具控制模块13.9用于与选装作业机具连接,所述轮毂电机控制器13.7设置有四个,每个轮毂电机控制器13.7对应连接一个轮毂电机4。
39.进一步地,本实用新型可以适用于中型播种机具,中型洒水机具,中型农药喷洒机具,中型犁地机具,中型除草机具等选装作业机具的使用,使用时,直接挂接在底盘1下方,并将中型播种机具,中型洒水机具,中型农药喷洒机具,中型犁地机具,中型除草机具等作业机具的控制端与选装机具控制模块13.9连接。
40.作为本实施例的进一步说明,本实用新型不仅适用于中型播种机具,中型洒水机具,中型农药喷洒机具,中型犁地机具,中型除草机等农业机具的挂接使用,也适用于喷漆机具、清扫机具等工业机具的挂接使用。
41.本实用新型工作时具有三种控制模式:
42.1)遥控模式:可以通过遥控发射器13.4向总控制单元13.3发出控制信号,总控制单元13.3再通过二级控制单元13.6向轮毂电机控制器13.7发出控制信号,控制轮毂电机4工作,实现无人线控底盘车的行走控制,同时总控制单元13.3还可以通过转向电机控制器13.8向转向驱动器8发出控制信号,实现转向控制,通过选装机具控制模块13.9控制选装作业机具作业。
43.2)无人控制模式:通过无人驾驶系统13.1设定运行轨迹,无人驾驶系统13.1按输入轨迹,自动向总控制单元13.3发出控制信号,总控制单元13.3再通过二级控制单元13.6向轮毂电机控制器13.7发出控制信号,控制轮毂电机4工作,实现无人线控底盘车的行走控制,同时总控制单元13.3还可以通过转向电机控制器13.8向转向驱动器8发出控制信号,实现转向控制,通过选装机具控制模块13.9控制选装作业机具作业。
44.3)触摸屏人机交互系统13.2控制,通过操作触摸屏人机交互系统13.2的触摸屏13.21向总控制单元13.3发出控制信号,总控制单元13.3再通过二级控制单元13.6向轮毂电机控制器13.7发出控制信号,控制轮毂电机4工作,实现无人线控底盘车的行走控制,同时总控制单元13.3还可以通过转向电机控制器13.8向转向驱动器8发出控制信号,实现转向控制,通过选装机具控制模块13.9控制选装作业机具作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1