一种增程式数控连杆式电动装载机
1.本实用新型涉及装载机领域,特别是一种增程式数控连杆式电动装载机。
背景技术:
2.工程机械是用于工程建设的施工机械的总称,装载机是最主要的工程机械之一。装载机广泛用于公路、铁路、建筑、矿山等建设工程的土石方施工机械,主要用于铲装土壤、砂石等物料,也可对矿石、硬土等作轻度铲装作业。现在的装载机主要有机械传动式和液压传动式。机械式装载机所能完成的动作简单,许多动作不能实现;液压式装载机因为机动性好、灵活等优点,广泛应用于各种领域,液压式挖掘机可以灵活地执行各种工程动作,但又存在液压系统零部件要求高、寿命不长、易漏油等缺陷,这是工程机械领域一个长期未能取得突破的棘手难题。多自由度数控连杆式机构的输出运动由多个原动件共同决定,是多自变量的函数,通过适当的控制程序就可实现复杂的运动规律,改变控制程序即可改变机构的输出运动,亦输出的柔性化。且其电机都可以安装在机架上,避免了在铰接处导致刚性差、惯量大等问题。多自由度数控连杆式机构要实现任意的轨迹输出,必须采用数控电机驱动,在各个数控电机配合驱动下,机构输出端才能实现各种装载机要求的动作,因为电池容量有限,使多自由度数控连杆式电动装载机使用时间很短,使用范围很有限。
3.多自由度数控连杆式电动装载机电池的用量很大才能满足续航里程和满足挖掘工作时长的要求,电池深度放电会影响电池的使用寿命,而且还必须建立大功率充电站或换电站,在不方便充电的地方只有被迫拖车。
技术实现要素:
4.本实用新型的目的是提供一种增程式数控连杆式电动装载机,以解决液压系统零部件要求高、寿命不长、易漏油等缺陷以及多自由度数控连杆式电动装载机电池的用量很大才能满足续航里程和满足挖掘工作时长的要求而时常被迫充电或拖车的问题,实现当电池无法满足续航里程和装载工作时长要求时,打开或者切换某一装置可以继续为电池提供电能,以满足续航里程和装载工作时长要求而不必就地停下给电池充电,当增程式数控连杆式电动装载机不行驶和不进行装载工作时,也应满足可以通过外接充电方式给电池充电,并且还应可以根据实际情况来切换工作模式。并且还应满足装载机作业要求,并具有液压装载机承载能力大、受力好等优点,克服传统液压装载机维修保养成本高、反应不够灵敏等缺点。
5.为实现上述目的,本实用新型采用了以下的技术手段:
6.本实用新型所述的一种增程式数控连杆式电动装载机,包括机架、数控连杆式装载机构、车轮及驱动系统,驱动系统设置在机架上,数控连杆式装载机构的主动杆通过离合器连接到驱动系统的输出端,车轮设置在机架的下部,车轮通过离合器连接到驱动系统的输出端,所述的驱动系统包括:发动机、发电机、电池、电动机、离合器、电控模块、动力分配机构以及减速器,发动机的转动轴连接离合器c3,离合器c3连接到发电机主轴的一端,发电
机主轴的另一端连接离合器c2,离合器c2连接到动力分配机构,动力分配机构连接到电动机主轴上;所述的动力分配机构是行星齿轮系,行星齿轮系的行星架连接到减速器的主动轴,减速器的从动轴连接到车轮和主动杆控制器后再连接到车轮和主动杆;行星齿轮系的太阳轮连接到电动机的转动轴上,行星齿轮系的齿圈根据控制需要连接到壳体或者发电机的主轴上;发电机通过电线电缆连接到电控模块后再连接电池,电池通过电线电缆连接电控模块后再连接到电动机中。
7.所述的数控连杆式装载机构包括第一主动杆、第一连杆、摇臂、第一拉杆、第二拉杆、动臂、铲斗、动臂抬升机构,所述动臂一端依次连接第一转动副、第二转动副连接在机架上,动臂另一端通过第三转动副、第四转动副与铲斗连接,所述动臂抬升机构一端与机架连接,另一端与动臂连接,所述第一主动杆一端通过第五转动副连接到机架上,另一端通过第六转动副与第一连杆连接,第一连杆另一端通过第七转动副与摇臂一端连接,摇臂另一端通过第八转动副连接到动臂上,所述摇臂另外两端分别通过第九转动副、第十转动副与第一拉杆、第二拉杆连接,第一拉杆和第二拉杆另一端分别通过第十一转动副、第十二转动副与铲斗连接,所述第一主动杆在位于机架上的电机的带动下绕转动副转动,通过第一连杆、摇臂、第一拉杆、第二拉杆传递运动,从而推动铲斗绕位于动臂上的第三转动副和第四转动副转动;所述动臂抬升机构包括第二主动杆、第二连杆、第三主动杆、第三连杆,所述第二主动杆、第三主动杆一端分别通过第十三转动副、第十四转动副与机架连接,另一端分别通过第十五转动副、第十六转动副与第二连杆、第三连杆连接,第二连杆、第三连杆分别通过第十七转动副、第十八转动副与动臂连接。
8.所述的电控模块至少包括整流模块、逆变模块以及整流驱动模块,整流模块以及逆变模块并联连接在发电机与电池之间,整流模块与逆变模块上分别设置开关;整流驱动模块设置在电池与电动机之间。
9.所述的电控模块还包括充电模块,充电接口连接到充电模块中。
10.所述的驱动系统分成五种工作状态,分别是低速模式、高速模式、混合低速模式、混合高速模式以及能量回收模式,所述的低速模式下发动机与发电机之间的离合松开,发电机与电动机之间的离合松开,发动机不工作,电池供电给电动机,电动机与减速器之间的离合吸合,减速器带动车轮和/或主动杆。
11.所述的高速模式下发动机与发电机之间的离合松开,发电机与电动机之间的离合吸合,电池同时给发电机及电动机供电,电动机与减速器之间的离合吸合,减速器带动车轮和/或主动杆。
12.所述的混合低速模式下发动机与发电机之间的离合吸合,发电机与电动机之间的离合松开,发电机给电池供电,电池给电动机供电,电动机与减速器之间的离合吸合,减速器带动车轮和/或主动杆。
13.所述的混合高速模式下发动机与发电机之间的离合吸合,发电机与电动机之间的离合吸合,发电机给电池供电,电池给电动机供电,电动机与减速器之间的离合吸合,减速器带动车轮和/或主动杆。
14.所述的能量回收模式下发动机与发电机之间的离合松开,发电机与电动机之间的离合松开,由车轮带动电动机转动,电动机转动产生的电通过整流驱动模块给电池充电。
15.本实用新型获得的有益效果是:
16.(1)本实用新型多自由度数控连杆式装载机构的输出运动由多个原动件共同决定,是多自变量的函数,通过适当的控制程序就可实现复杂的运动规律,改变控制程序即可改变机构的输出运动,亦输出的柔性化。
17.(2)本实用新型增程式数控连杆式电动装载机在电池电量充足时,电池驱动电机,提供整车驱动功率需求,此时发动机不参与工作。当电池电量消耗到一定程度时,发动机启动,发动机为电池提供能量对电池进行充电,只要有加油站就可以一直跑下去,在不方便充电的地方不会被迫拖车,解决基础设施不足的问题,当电池电量充足时,发动机又停止工作,由电池驱动电机,提供整车驱动,能满足增程式数控连杆式电动装载机续航里程和装载工作时长需求而不必就地停下到充电桩给电池充电。
18.(3)本实用新型增程式数控连杆式电动装载机不必建设大型充电设施,晚上充电桩充电,白天有计划地使用电池能量,减少燃油发动机动力,显著提高节油率,发动机可以一直处于最佳工作状态,同时具有刹车能量回收功能,电池可以浅度充放电,电池寿命延长。
19.(4)本实用新型增程式数控连杆式电动装载机可纯电动模式运行,与普通电动装载机相比所需电池容量小,造价低且不会发生缺电抛锚现象。本实用新型不仅能达到液压装载机各项工作要求,还具有动作反应迅速,灵敏高效等优点,并且克服了传统液压装载机维修保养成本高、液压油路易受环境影响等缺点。
附图说明
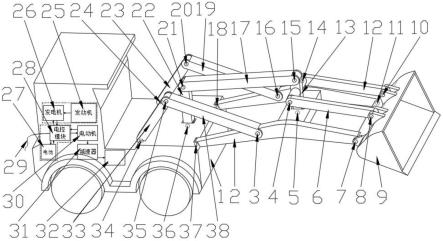
20.图1为本实用新型所述增程式数控连杆式电动装载机示意图。
21.图2为本实用新型所述增程式数控连杆式电动装载机原理简图。
22.图3为本实用新型所述增程式数控连杆式电动装载机车载可充电储能装置示意图。
23.图4为本实用新型所述增程式数控连杆式电动装载机动力分配机构示意图。
24.图5为本实用新型所述增程式数控连杆式电动装载机低速工作模式示意图。
25.图6为本实用新型所述增程式数控连杆式电动装载机高速工作模式示意图。
26.图7为本实用新型所述增程式数控连杆式电动装载机混合低速工作模式示意图。
27.图8为本实用新型所述增程式数控连杆式电动装载机混合高速工作模式示意图。
28.图9为本实用新型所述增程式数控连杆式电动装载机能量回收工作模式示意图。
29.图10为本实用新型所述增程式数控连杆式装载机构。
30.图中标记为:机架1、动臂2、第十七转动副3、第九转动副4、第八转动副5、第一拉杆6、第三转动副7、第十一转动副8、铲斗9、第十二转动副10第四转动副11、第二拉杆12、摇臂13、第十转动副14、第七转动副15、第十八转动副16、第一连杆17、第二转动副18、第三连杆19、第十六转动副20、第六转动副21、第一主动杆22、第三主动杆23、第十四转动副24、发动机25、发电机26、电池27、电控模块28、外接充电方式29、电动机30、减速器31、车轮和主动杆控制器32、第二主动杆33、第十三转动副34、第十五转动副35、第五转动副36、第一转动副37、第二连杆38。
具体实施方式
31.下面结合附图对本实用新型技术方案做进一步说明。
32.对照图1、图2、图3、图4、图10,所述一种增程式数控连杆式电动装载机包括车载可充电储能装置、车载辅助供电装置、电动机、减速器31、数控连杆式装载机构及机架1。车载可充电储能装置设置在机架1上,车载可充电储能装置包括电池27、电控模块28和充电接口29,车载辅助供电装置包括发动机25和发电机26,车载辅助供电装置和车载可充电储能装置相连,车载辅助供电装置发出的电送入到车载可充电储能装置,电动机与电池连接,电动机的转动轴连接到减速器的主动轴中,减速器的从动轴连车轮和主动杆控制器后连接到车轮和主动杆,车轮和主动杆控制器主要作用是根据需要将动力分配给车轮以及主动杆。
33.对照图1、图2、图3,所述车载可充电储能装置包括电池27和电控模块28,车载可充电储能装置具有外接充电方式29。外接充电方式29通过连接线连接到电控模块后再给电池充电,当增程式数控连杆式电动装载机不行驶和不进行装载工作时,可以用外接充电方式29通过电控模块28给电池27充电,当增程式数控连杆式电动装载机行驶和进行装载工作时,可以打开车载辅助供电装置给电池27充电,以满足续航里程和装载工作时长要求而不必就地停下到充电桩给电池27充电。
34.对照图1、图2、图3、图4,所述车载辅助供电装置包括发动机25、发电机26,所述发动机25用来驱动发电机26给电池27充电,并不直接驱动车轮和主动杆,也不需要变速箱,相当于在普通的电动车辆上装载了一台汽油/柴油发电机;所述动力分配机构用来根据车载可充电储能装置的储能情况,来控制动力的分配。动力分配机构是一个行星齿轮系。
35.所述发电机26一端连接离合器c2,发电机26的另一端连接离合器c3,离合器c2与行星齿轮系的齿圈相连,所述离合器c3和发动机25相连。减速器连接到行星齿轮系的行星架,当电池27电量不足时,打开车载辅助供电装置,可以继续为电池27提供电能,以满足续航里程和装载工作时长要求而不必就地停下给电池27充电。
36.对照图1、图2、图3、图4、图5、图6、图7、图8、图9,所述车载辅助供电装置和车载可充电储能装置及和电动机之间相互配合组成的驱动系统一共有5种工作模式,分别为:低速模式、高速模式、混合低速模式、混合高速模式及能量回收模式。所述电动机为一功率较大的电动机,发电机是一个一功率较小的发电机,发电机以及电动机需要即可以作为发电及又可以作为电动机。电动机主要用于把电能转换成机械能,发电机主要用于发电。所述五种工作模式通过3个离合器来控制动力的分配。3个离合器分别命名为离合器c1、离合器c2、离合器c3,离合器c1用于行星齿轮系齿圈与壳体的离合控制,当离合器c1将行星齿轮系齿圈与壳体吸住,行星齿轮系齿圈固定在壳体上;离合器c2用于发电机26与行星齿轮系齿圈连接控制,离合器c3用于发动机25与发电机26连接控制。
37.低速模式下c1吸合,c2、c3松开,发电机26以及发动机25停转,齿圈固定,此时动力源为电池27,即纯电动模式下工作。
38.高速模式下c2吸合,c1、c3松开,发动机25停转,发电机26此时充当电动机工作,推动齿圈转动,电动机推动太阳轮转动,发电机带动齿圈转动,齿圈和太阳轮同时转动带动行星架转动,从而把动力传到减速器上,发电机26充当电动机推动齿圈转动,降低了与太阳轮连接的另一电动机的转速,提高了其能源使用率。
39.混合低速模式下c1、c3吸合,c2松开,发动机25运转,齿圈固定,发动机25推动发电
机26发电,并为电池27充电,同时电池27为电动机供电推动太阳轮转动,行星架跟随太阳轮转动,从而把动力传到减速器。
40.混合高速模式下c2、c3吸合,c1松开,发动机25以及发电机26推动齿圈转动同时发电,电动机推动太阳轮转动,齿圈和太阳轮同时转动,带动行星架转动,从而把动力传到减速器,发动机25推动齿圈转动,降低了与太阳轮连接的另一电动机的转速,提高了其能源使用率。
41.能量回收模式下c1吸合,c2、c3松开,发动机25发电机26停转,车轮带动行星架转动,齿圈固定,太阳轮随着行星架转动,此时,功率较大的电动机作为发电机对电池27充电,所述太阳轮连接到电动机,所述行星架连接到减速器直接输出动力到车轮和主动杆控制器,通过车轮和主动杆控制器将动力分配用于推动装载机行走和驱动数控连杆式装载机构进行装载作业,所述齿圈则根据实际情况连接到所述动力分配机构的壳体(固定)或者连接到发电机26和发动机25。
42.在增程式数控连杆式电动装载机的实际工作中,可以根据不同的工作模式需要切换工作模式,以满足增程式数控连杆式电动装载机续航里程和装载工作时长需求。
43.对照图1、图10,所述数控连杆式装载机构包括第一主动杆22、第一连杆17、摇臂13、第一拉杆6、第二拉杆12、动臂2、铲斗9、动臂抬升机构,所述动臂2一端通过第一转动副37、第二转动副18连接在机架1上,动臂2另一端通过第三转动副7、第四转动副11与铲斗9连接;所述动臂抬升机构一端与机架1连接,另一端与动臂2连接;第一主动杆22一端通过第五转动副36连接到机架1上,另一端通过第六转动副21与第一连杆17的一端连接,第一连杆17另一端通过第七转动副15与摇臂13的一端连接,摇臂13另一端通过第八转动副5连接到动臂2上;摇臂13另外两端分别通过第九转动副4、第十转动副14与第一拉杆6、第二拉杆12的一端连接,第一拉杆6和第二拉杆12的另一端分别通过第十一转动副8、第十二转动副10连接到铲斗9;第一主动杆22在位于机架1上的电动机的带动下绕转动副转动,通过第一连杆17、摇臂13、第一拉杆6、第二拉杆12传递运动,从而推动铲斗9绕位于动臂2上的第三转动副7和第四转动副11转动。所述动臂抬升机构包括第二主动杆33、第二连杆38、第三主动杆23、第三连杆19,第二主动杆33以及第三主动杆23的一端分别通过第十三转动副34、第十四转动副24连接到机架1,第二主动杆33以及第三主动杆23另一端分别通过第十五转动副35、第十六转动副20与第二连杆38、第三连杆19连接,第二连杆38、第三连杆19分别通过第十七转动副3、第十八转动副16连接到动臂2。动臂2在动臂抬升机构第二主动杆33、第三主动杆23的带动下抬升或下降,配合铲斗9的翻转动作,共同完成装载作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1