一种紧急制动装置及矿用自卸车的制作方法
1.本实用新型涉及车辆工程技术领域,尤其涉及一种紧急制动装置及矿用自卸车。
背景技术:
2.随着国家碳达峰碳中和的发展要求,矿用车领域节能减排的要求越来越严格,新能源矿用车由于其零排放、高节能而广受矿山行业的欢迎,由于矿区多为重载下坡工况,在矿用车重载情况下的紧急制动,存在制动力不足的情况,容易造成安全事故。
3.基于此,亟需一种紧急制动装置及矿用自卸车,以解决上述存在的问题。
技术实现要素:
4.基于以上所述,本实用新型的目的在于提供一种紧急制动装置及矿用自卸车,提高了车辆的制动性能及安全性能。
5.为达上述目的,本实用新型采用以下技术方案:
6.一方面,提供一种紧急制动装置,包括:
7.电磁阀;
8.继动阀,其一端连接于所述电磁阀,另一端连接于车桥的制动气室;
9.电涡流缓速器控制器和电涡流缓速器,所述电涡流缓速器控制器连接于所述电涡流缓速器,所述电涡流缓速器连接于所述车桥的传动轴,所述电涡流缓速器能够对所述传动轴施加制动力。
10.作为一种紧急制动装置的优选技术方案,还包括制动脚阀,所述制动脚阀一端连接于所述继动阀。
11.作为一种紧急制动装置的优选技术方案,还包括电机控制模块,所述电机控制模块包括电机和mcu,所述mcu电连接于整车控制器,且电连接于所述电机。
12.作为一种紧急制动装置的优选技术方案,还包括报警装置,所述报警装置电连接于整车控制器。
13.作为一种紧急制动装置的优选技术方案,所述报警装置包括语音报警模块和/或声光报警模块。
14.作为一种紧急制动装置的优选技术方案,还包括倾角传感器,所述倾角传感器电连接于整车控制器,所述倾角传感器用于检测车辆所处的路面坡度。
15.作为一种紧急制动装置的优选技术方案,还包括前置雷达,所述前置雷达电连接于整车控制器,所述前置雷达用于检测车辆与前方障碍物的距离。
16.作为一种紧急制动装置的优选技术方案,还包括动力电池模块,所述动力电池模块电连接于整车控制器,所述动力电池模块用于为车辆供电,且所述动力电池模块能够在车辆制动时进行能量回收。
17.作为一种紧急制动装置的优选技术方案,所述电磁阀为asr电磁阀。
18.另一方面,提供一种矿用自卸车,包括以上任一方案所述的紧急制动装置。
19.本实用新型的有益效果为:
20.本实用新型提供一种紧急制动装置及矿用自卸车,当整车控制器接收到紧急制动信号时,一方面,电磁阀接收整车控制器的第一信号,电磁阀控制继动阀通路,继动阀迅速向制动气室内通气,实现了对车桥的紧急制动;另一方面,电涡流缓速器控制器接收整车控制器的第二信号,控制电涡流缓速器对车桥的传动轴施加制动力,再一次实现了对车桥的紧急制动。本实用新型通过电磁阀和继动阀对车桥进行紧急制动,同时通过电涡流缓速器控制器和电涡流缓速器对车桥进行紧急制动,车桥受到多渠道制动,提高车桥的制动性能及安全性能,提高车辆的安全性;同时采用电涡流缓速器进行制动,具有经济性、环保性、稳定性和舒适性。
附图说明
21.为了更清楚地说明本实用新型实施例中的技术方案,下面将对本实用新型实施例描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据本实用新型实施例的内容和这些附图获得其他的附图。
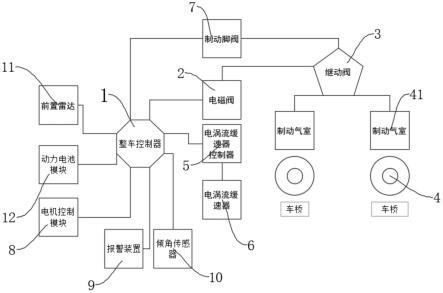
22.图1是本实用新型具体实施方式提供的紧急制动装置的示意图。
23.图中标记如下:
24.1、整车控制器;2、电磁阀;3、继动阀;4、车桥;41、制动气室;5、电涡流缓速器控制器;6、电涡流缓速器;7、制动脚阀;8、电机控制模块;9、报警装置;10、倾角传感器;11、前置雷达;12、动力电池模块。
具体实施方式
25.下面结合附图和实施例对本实用新型作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部结构。
26.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
27.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
28.在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限
制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
29.如图1所示,本实施例提供一种矿用自卸车,包括紧急制动装置,该紧急制动装置包括电磁阀2、继动阀3、电涡流缓速器控制器5和电涡流缓速器6。
30.具体地,继动阀3一端连接于电磁阀2,另一端连接于车桥4的制动气室41;电涡流缓速器控制器5连接于电涡流缓速器6,电涡流缓速器6连接于车桥4的传动轴,电涡流缓速器6能够对传动轴施加制动力。该紧急制动装置还包括整车控制器1(vehicle electronic control unit,vecu),电涡流缓速器控制器5和电磁阀2均电连接于整车控制器1。需要说明的是,电涡流缓速器控制器5和电磁阀2均电连接于整车控制器1,这里的电连接可以是通过电缆相连也可以是通过wifi信号或蓝牙信号无线相连,这里电涡流缓速器控制器5和电磁阀2与整车控制器1的连接方式,以及电涡流缓速器控制器5与电涡流缓速器6的连接方式,是控制领域的常规连接手段,在此无需赘述。
31.当整车控制器1接收到紧急制动信号时,一方面,电磁阀2接收整车控制器1的第一信号,电磁阀2控制继动阀3通路,继动阀3迅速向制动气室41内通气,促使车辆产生摩擦制动,实现了对车桥4的紧急制动;另一方面,电涡流缓速器控制器5接收整车控制器1的第二信号,控制电涡流缓速器6对车桥4的传动轴施加制动力,再一次实现了对车桥4的紧急制动。本实施例通过电磁阀2和继动阀3对车桥4进行紧急制动,同时通过电涡流缓速器控制器5和电涡流缓速器6对车桥4进行紧急制动,车桥4受到多渠道制动,提高车桥4的制动性能及安全性能,提高车辆的安全性;同时采用电涡流缓速器6进行制动,具有经济性、环保性、稳定性和舒适性。
32.本实施例中,电磁阀2通过管路连接于继动阀3的进气口,继动阀3的出气口连接于制动气室41,工作时,电磁阀2的输出气压作为继动阀3的控制压力输入,在控制压力作用下,压缩空气便由储气筒直接通过继动阀3的进气口进入制动气室,而不用流经电磁阀2,这大大缩短了制动气室41的充气管路,加速了制动气室41的充气过程。本实施例中,电磁阀2为asr电磁阀。
33.进一步地,电涡流缓速器6工作时,电涡流缓速器6的定子线圈内通电产生磁场,而电涡流缓速器6的转子随车桥4的传动轴一起旋转。转子切割定子产生的磁力线,从而在转子盘内部产生涡旋状的感应电流。这样,定子就会向转子施加一个阻碍转子旋转的电磁力,从而产生制动力矩。同时,涡流在具有一定电阻的转子盘内部流通,由于电阻的热效应会把电能转化为热能,这样,车辆行驶的动能就通过电磁感应和电阻发热最终转化为热能散发。
34.进一步地,紧急制动装置还包括制动脚阀7,制动脚阀7一端连接于整车控制器1,另一端连接于继动阀3。通过驾驶员踩踏制动脚阀7,实现对继动阀3通断的控制,进而实现对车辆进行制动。
35.紧急制动装置还包括电机控制模块8,电机控制模块8包括电机和mcu(microcontroller unit,微控制单元),mcu电连接于整车控制器1,且电连接于电机,通过mcu对电机进行控制逻辑的信号输出。本实施例中,整车控制器1实时监测mcu,当电机控制模块8故障造成车辆丧失电制动力瞬间丢失而使车辆失控的情况,例如:mcu过流或过温以及通信故障时,整车控制器1接收到紧急制动信号。
36.紧急制动装置还包括动力电池模块12,动力电池模块12电连接于整车控制器1,动力电池模块12用于为车辆供电,且动力电池模块12能够在车辆制动时进行能量回收。动力
电池模块12用于车辆驱动提供能量并且可回收储能,电机控制模块8用于车辆的动力驱动且车辆制动的时候电机能够发电制动,给动力电池模块12储能,提高能耗利用率。本实施例中,整车控制器1实时监测动力电池模块12,当动力电池模块12故障造成车辆丧失电制动力瞬间丢失而使车辆失控的情况,例如:动力电池模块12高温或过流的故障,导致下电压,电池不供电,此时整车控制器1接收到紧急制动信号。
37.优选地,紧急制动装置还包括报警装置9,报警装置9电连接于整车控制器1。当整车控制器1接收到紧急制动信号时,报警装置9为驾驶员提供报警信息,便于操作人员及时进行补救措施,提高车辆安全性。
38.本实施例中,报警装置9包括语音报警模块和/或声光报警模块。语音报警模块和/或声光报警模块与整车控制器1实现can(controller area network,控制器局域网络)通信,语音报警模块广播紧急制动信息给驾驶员,和驾驶员实现人机交互。
39.进一步地,紧急制动装置还包括前置雷达11,前置雷达11电连接于整车控制器1,前置雷达11用于检测车辆与前方障碍物的距离。前置雷达11实时监测车辆与前车距离,并将距离信息通过can通信传递给整车控制器1。整车控制器1实时监测车辆状态,当与前车跟车距离过近时,驾驶员无相应制动的动作,此时整车控制器1接收到紧急制动信号。
40.进一步优选地,紧急制动装置还包括倾角传感器10,倾角传感器10电连接于整车控制器1,倾角传感器10用于检测车辆所处的路面坡度。倾角传感器10可实时监测车辆目前所处的路面坡度,并将路面信息通过can总线播报给整车控制器1,判定车辆是在下坡。根据下坡角度、车辆速度以及前车距离等信息,整车控制器1综合判断车辆是否进行紧急制动。
41.本实施例的紧急制动装置,可实时监控车辆运行状态,并在动力电池模块12、电机控制模块8有故障时且驾驶员操作不当时迅速紧急制动,保护车辆及驾驶员的安全。本实施例可有效提高矿用自卸车的制动性能及安全性能。
42.注意,上述仅为本实用新型的较佳实施例及所运用技术原理。本领域技术人员会理解,本实用新型不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1