一种能够翻越障碍物的物流车的制作方法
1.本实用新型涉及物流技术领域,尤其涉及一种能够翻越障碍物的物流车。
背景技术:
2.在物料进行室内外运输的过程中,需要用到物流车。现有的物流车现有的汽车直接拿来改造装载货物的部分后或不改造进行使用。现有的车。现有的车在遇到高于车轮的中心线的障碍物拦断路面时,则无法通过,而物流运输在下沉到山村地区时,会遇到道路山体石头滚落阻断的现象也即会遇到高于车轮的中心线的障碍物拦断路面的现象。此时导致物流中断不畅而导致货物滞留,如果运输的鲜活物品,滞留会导致货物腐烂。
技术实现要素:
3.本实用新型旨在提供一种能够越过高于车轮的中心线且拦断路面的障碍物的能够翻越障碍物的物流车,用于解决现有的物流车遇到高于车轮的中心线的障碍物拦断路面时则无法通过的问题。
4.以上技术问题是通过以下技术方案解决的:一种能够翻越障碍物的物流车,包括车体、前越障机构和后越障机构,所述车体的前端设有两个前轮、后端设有两个后轮,两个前轮分别为左前轮和右前轮,两个后轮分别为左后轮和右后轮,前越障机构包括连接在车体下方的设沿前后延伸的前滑槽的前纵梁、穿设在前滑槽内的前竖滑杆、连接在前竖滑杆上端的前悬挂块和连接在前竖滑杆下端的前爬坡板,前滑槽沿上下方向贯通前纵梁,前竖滑杆的下端铰接在前爬坡板的上表面上;前竖滑杆位于前滑槽的最前端且通过前悬挂块悬挂在前纵梁上时,前爬坡板位于前轮的正前方且在自重的作用下处于前端高于前轮的轴线后端支撑在地面上的状态倾斜;前竖滑杆位于前滑槽的最后端且通过前悬挂块悬挂在前纵梁上时,前爬坡板位于前轮的正后方且在自重的作用下处于前端高于前轮的轴线后端支撑在地面上的状态倾斜;左前轮的轮轴连接在同车体连接在一起的位于左前轮左侧的左前悬挂杆上,右前轮的轮轴连接在同车体连接在一起的位于右前轮右侧的右前悬挂杆上,前爬坡板能够从左前悬挂杆与右前悬挂杆之间穿过;后越障机构包括连接在车体下方的设沿后后延伸的后滑槽的后纵梁、穿设在后滑槽内的后竖滑杆、连接在后竖滑杆上端的后悬挂块和连接在后竖滑杆下端的后爬坡板,后滑槽沿上下方向贯通后纵梁,后竖滑杆的下端铰接在后爬坡板的上表面上;后竖滑杆位于后滑槽的最前端且通过后悬挂块悬挂在后纵梁上时,后爬坡板位于后轮的正前方且在自重的作用下处于前端高于后轮的轴线后端支撑在地面上的状态倾斜;后竖滑杆位于后滑槽的最后端且通过后悬挂块悬挂在后纵梁上时,后爬坡板位于后轮的后方且在自重的作用下处于前端高于后轮的轴线后端支撑在地面上的状态倾斜;左后轮的轮轴连接在同车体连接在一起的位于左后轮左侧的左后悬挂杆上,右后轮的轮轴连接在同车体连接在一起的位于右后轮右侧的右后悬挂杆上,后爬坡板能够从左后悬挂杆与右后悬挂杆之间穿过。本实用新型的物流车越过障碍物的方法为:第一步、物流车前行到前爬坡板的前端搁在障碍物的顶端上;第二步、前轮经前爬坡板行驶到障碍物顶
端后继续前行而越过障碍物,前轮越过障碍物后使前爬坡板相对于车体后移到前轮后方且处于前端高后端底的状态,使前竖滑杆前移到位于前滑槽的最前端,前竖滑杆前移的过程中驱动前爬坡板越过前轮;第三步、物流车前行使得后爬坡板的前端搁在障碍物的顶端上;第四步、后轮经后爬坡板行驶到障碍物的顶端后继续前行而越过障碍物,后轮越过障碍物后使后爬坡板相对于车体后移到位于后轮的后方且处于前端高后端底的状态,使后竖滑杆前移到位于后滑槽的最前端,后竖滑杆前移的过程中驱动后爬坡板越过后轮。本技术方案,物流车处于底盘离地面的距离为车轮直径以上(具体为2倍)高悬空设置状态,设置爬坡板,在遇到车轮正常滚动无法越过(即高于车轮轴线所在的平面的障碍物)时,通过爬坡板搭在障碍物与地面直径形成斜面,从而供车轮形式到障碍物上方,实现越过。解决了越障碍的问题。
5.作为优选,所述前滑槽的最前端设有前越障机构部前电磁铁、后端设有前越障机构部后电磁铁,所述前竖滑杆为铁磁体制作而成,所述后滑槽的最前端设有后越障机构部前电磁铁、后端设有后越障机构部后电磁铁,所述后竖滑杆为铁磁体制作而成。第二步中,前轮越过障碍物后通过前越障机构部后电磁铁吸附前竖滑杆后移以使前爬坡板后移到位于前轮的后方,通过前越障机构部前电磁铁吸附前竖滑杆使前竖滑杆前移到位于前滑槽的最前端;第四步中,后轮越过障碍物后通过后越障机构部后电磁铁吸附后竖滑杆后移以使后爬坡板后移到位于后轮的后方,通过后越障机构部前电磁铁吸附后竖滑杆使后竖滑杆前移到位于后滑槽的最前端。能够用于实现爬坡板的主动移位,以实现越障过程的自动化。
6.作为优选,所述前爬坡板的下表面上设有朝前检测物体的前漫反射型光电开关;前爬坡板在自重的作用下后端支撑在地面上时,前漫反射型光电开关位于经过前轮的轴线的水平面上、前爬坡板的前端位于经过前轮的轴线的水平面的上方、前漫反射型光电开关的发出的光向前、前漫反射型光电开关的有效作用距离的终点位于爬坡板的前端的正下方;所述后爬坡板的下表面上设有朝前检测物体的后漫反射型光电开关;后爬坡板在自重的作用下后端支撑在地面上时,后漫反射型光电开关位于经过后轮的轴线的水平面上、后爬坡板的前端位于经过后轮的轴线的水平面的上方、后漫反射型光电开关的发出的光向前、后漫反射型光电开关的有效作用距离的终点位于后爬坡板的前端的正下方,前爬坡板的下表面上设有前开关安装凹坑,所述前漫反射型光电开关完全容置在所述前开关安装凹坑内,后爬坡板的下表面上设有后开关安装凹坑,所述后漫反射型光电开关完全容置在所述后开关安装凹坑内。使用时,前漫反射型光电开关未检测到障碍物时前越障机构部前电磁铁吸附住前竖滑杆,前漫反射型光电开关检测到有障碍物时前越障机构部前电磁铁失去对前竖滑杆的吸附作用,后漫反射型光电开关未检测到障碍物时后越障机构部前电磁铁吸附住后竖滑杆,后漫反射型光电开关检测到有障碍物时后越障机构部前电磁铁失去对后竖滑杆的吸附作用。能够自动识别有否障碍物,没有障碍物时能够避免爬坡板后移,有时能够在爬坡板搭接到障碍物上时爬坡板才能够后移。爬坡板搭接到障碍物上时的可靠性好。能够防止越障时漫反射型光电开关漫反射型光电开关被损坏。
7.作为优选,前竖滑杆的前侧表面和前竖滑杆的后侧表面都同前滑槽面配合抵接在一起,后竖滑杆的前侧表面和后竖滑杆的后侧表面都同后滑槽面配合抵接在一起。能够避免爬坡板以竖转轴为轴转动,导致爬坡板同悬挂杆干涉而不能够复位到前轮的前方。
8.作为优选,前竖滑杆的下端通过沿左右方向延伸的前轴头铰接在爬坡板的上表面
上;后竖滑杆的下端通过沿左右方向延伸的后轴头铰接在爬坡板的上表面上。能够避免爬坡板以同竖转轴的铰接点产生左右摆动,能够提高越障时的可靠性。
9.作为优选,前爬坡板前端的下表面上设有前橡胶层,后爬坡板前端的下表面上设有后橡胶层。能够防止车辆爬上搭接在障碍物上的爬坡板时爬坡板从障碍物上滑下,提高了越障时的可靠性。
10.作为优选,所述前爬坡板上有前爬坡板部通孔,前爬坡板部通孔沿上下方向贯通前爬坡板;所述后爬坡板上有后爬坡板部通孔,后爬坡板部通孔沿上下方向贯通后爬坡板。能够降低车辆前行的阻拦和负载。
11.本实用新型还包括横向推板和朝下伸缩的按压气缸,按压气缸的缸体同车体固定在一起,横向推板的两端分别同左前悬挂杆与右前悬挂杆连接在一起,横向推板的前侧设有托持板,前爬坡板的前端设有两把铲刀;前爬坡板的后端托持在托持板上而抵接在横向推板上且按压气缸伸出到行程终点时,按压气缸的活塞杆按压在前爬坡板的前端上、两把所述铲刀一一对应地位于左前轮和右前轮的正前方、铲刀同地面之间有间隙;所述间隙为10毫米以下,按压气缸的活塞杆上设有检测汽车前方是否有物体的雷达系统和吸起前爬坡板的气缸部电磁铁。使用时,雷达系统检测到汽车前方有上端位于前车轮轴线所在的水平面下方且高于所述间隙的同时横跨在两把所述铲刀之间的阻拦物时,气缸部电磁铁吸起前爬坡板到前爬坡板的高度高于所述阻拦物;雷达系统检测到汽车前方有上端位于前车轮轴线所在的平面以上的阻碍物时,按压气缸收缩到行程终点、前越障机构部前电磁铁吸附前竖滑杆到前滑槽的最前端。本技术方案,还能在没有遇到阻拦物和障碍物前,对车辆经过的路面部分进行清理,防止路面上的钉子扎到轮胎而损坏轮胎。能够将钉子推到或移到路面被车轮碾压到的部分的外围。
12.作为优选,铲刀处于铲路面上的物体的状态时,刀的上表面为前端低后端高的斜面,所述斜面上设有若干道沿前后方向分布的凸条,所述凸条包括第一段和第二段,第一段个第二段呈“v”字连接在一起,第一段和第二段的连接点朝前。能够使得被铲到铲刀上的物体滚落到路面被车轮碾压到的部分的两侧,避免而成落下到被车轮碾压到的部分而影响除钉效果。
13.作为优选,所述横向推板的左右两端设有两个一一对应地位于两个前轮后方的引导前爬坡板上升到前轮上方的导向板。避免横向推板的设置导致钱爬坡板不能够越过前轮。
14.本实用新型具有下述优点:能够越过高于车轮的中心线的拦断路面的障碍物;能够实现自动化越过;能够清除或推到能够刺破车轮的钉子,防止产生刺破轮胎的现象产生。
附图说明
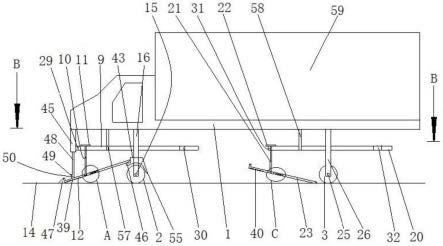
15.图1为物流车本实用新型处于清除路面钉子状态时的左视示意图;
16.图2为图1的a处的局部放大示意图;
17.图3为图1的b—b剖视示意图;
18.图4为本实用新型处于雷达系统检测到有障碍物时的左视示意图;
19.图5为前漫反射光电开关检测到有障碍物时的本实用新型的左视示意图;
20.图6为本实用新型前轮越过障碍物时的左视示意图;
21.图7为本实用新型后漫反射光电开关检测到有障碍物时的左视示意图;
22.图8为本实用新型后轮刚越过障碍物且前爬坡板复位进行清除路面钉子时的左视示意图;
23.图9为本实用新型整体离开障碍物时的左视示意图;
24.图10为铲到的放大示意图;
25.图11为图1的c处的局部放大示意图。
26.图5到图9中按压气缸没有画出。
27.图中:车体1、前轮2、后轮3、左前轮4、右前轮5、左后轮6、右后轮7、前滑槽8、前纵梁9、前竖滑杆10、前悬挂块11、前爬坡板12、前轴头13、地面14、左前轮的轮轴15、左前悬挂杆16、右前轮的轮轴17、右前悬挂杆18、后滑槽19、后纵梁20、后竖滑杆21、后悬挂块22、后爬坡板23、后轴头24、左后轮的轮轴25、左后悬挂杆26、右后轮的轮轴27、右后悬挂杆28、前越障机构部前电磁铁29、前越障机构部后电磁铁30、后越障机构部前电磁铁31、后越障机构部后电磁铁32、前漫反射型光电开关33、经过前轮的轴线的水平面34、前开关安装凹坑35、后漫反射型光电开关36、经过后轮的轴线的水平面37、后开关安装凹坑38、前橡胶层39、后橡胶层40、前爬坡板部通孔41、后爬坡板部通孔42、横向推板43、按压气缸44、按压气缸的缸体45、托持板46、铲刀47、按压气缸的活塞杆48、雷达系统49、气缸部电磁铁50、凸条51、第一段52、第二段53、第一段和第二段的连接点54、导向板55、阻碍物56、前悬挂架57、后悬挂架58、货箱59。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.参见图1到图11,一种能够翻越障碍物的物流车,包括车体1、前越障机构和后越障机构。车体上承载有货箱59。车体的前端设有两个前轮2、后端设有两个后轮3,两个前轮分别为左前轮4和右前轮5,两个后轮分别为左后轮6和右后轮7。前越障机构包括连接在车体下方的设沿前后延伸的前滑槽8的前纵梁9、穿设在前滑槽内的前竖滑杆10、连接在前竖滑杆上端的前悬挂块11和连接在前竖滑杆下端的前爬坡板12,前滑槽沿上下方向贯通前纵梁。前纵梁通过前悬挂架57同车体连接在一起。前竖滑杆的前侧表面和前竖滑杆的后侧表面都同前滑槽面配合抵接在一起。前竖滑杆的下端铰接在前爬坡板的上表面上,具体地:前竖滑杆的下端通过沿左右方向延伸的前轴头13铰接在爬坡板的上表面上。前竖滑杆位于前滑槽的最前端且通过前悬挂块悬挂在前纵梁上时,前爬坡板位于前轮的正前方且在自重的作用下处于前端高于前轮的轴线后端支撑在地面14上的状态倾斜;前竖滑杆位于前滑槽的最后端且通过前悬挂块悬挂在前纵梁上时,前爬坡板位于前轮的正后方且在自重的作用下处于前端高于前轮的轴线后端支撑在地面上的状态倾斜;左前轮的轮轴15连接在同车体连接在一起的位于左前轮左侧的左前悬挂杆16上,右前轮的轮轴17连接在同车体连接在一起的位于右前轮右侧的右前悬挂杆18上,前爬坡板能够从左前悬挂杆与右前悬挂杆之间穿过。后越障机构包括连接在车体下方的设沿后后延伸的后滑槽19的后纵梁20、穿设在后滑
槽内的后竖滑杆21、连接在后竖滑杆上端的后悬挂块22和连接在后竖滑杆下端的后爬坡板23,后滑槽沿上下方向贯通后纵梁。后纵梁通过后悬挂架58同车体连接在一起。后竖滑杆的前侧表面和后竖滑杆的后侧表面都同后滑槽面配合抵接在一起。后竖滑杆的下端铰接在后爬坡板的上表面上,具体地:后竖滑杆的下端通过沿左右方向延伸的后轴头24铰接在爬坡板的上表面上。后竖滑杆位于后滑槽的最前端且通过后悬挂块悬挂在后纵梁上时,后爬坡板位于后轮的正前方且在自重的作用下处于前端高于后轮的轴线后端支撑在地面上的状态倾斜;后竖滑杆位于后滑槽的最后端且通过后悬挂块悬挂在后纵梁上时,后爬坡板位于后轮的后方且在自重的作用下处于前端高于后轮的轴线后端支撑在地面上的状态倾斜;左后轮的轮轴25连接在同车体连接在一起的位于左后轮左侧的左后悬挂杆26上,右后轮的轮轴27连接在同车体连接在一起的位于右后轮右侧的右后悬挂杆28上,后爬坡板能够从左后悬挂杆与右后悬挂杆之间穿过。前滑槽的最前端设有前越障机构部前电磁铁29、后端设有前越障机构部后电磁铁30,前竖滑杆和前爬坡板都为铁磁体制作而成,后滑槽的最前端设有后越障机构部前电磁铁31、后端设有后越障机构部后电磁铁32,后竖滑杆为铁磁体制作而成。前爬坡板的下表面上设有朝前检测物体的前漫反射型光电开关33;前爬坡板在自重的作用下后端支撑在地面上时,前漫反射型光电开关位于经过前轮的轴线的水平面34上、前爬坡板的前端位于经过前轮的轴线的水平面的上方、前漫反射型光电开关的发出的光向前、前漫反射型光电开关的有效作用距离的终点位于爬坡板的前端的正下方;前爬坡板的下表面上设有前开关安装凹坑35,前漫反射型光电开关完全容置在前开关安装凹坑内。后爬坡板的下表面上设有朝前检测物体的后漫反射型光电开关36;后爬坡板在自重的作用下后端支撑在地面上时,后漫反射型光电开关位于经过后轮的轴线的水平面37上、后爬坡板的前端位于经过后轮的轴线的水平面的上方、后漫反射型光电开关的发出的光向前、后漫反射型光电开关的有效作用距离的终点位于后爬坡板的前端的正下方,后爬坡板的下表面上设有后开关安装凹坑38,后漫反射型光电开关完全容置在所述后开关安装凹坑内。前爬坡板前端的下表面上设有前橡胶层39,后爬坡板前端的下表面上设有后橡胶层40。前爬坡板上设有前爬坡板部通孔41,前爬坡板部通孔沿上下方向贯通前爬坡板;后爬坡板上有后爬坡板部通孔42,后爬坡板部通孔沿上下方向贯通后爬坡板。
30.前越障机构还包括横向推板43和朝下伸缩的按压气缸44,按压气缸的缸体45同车体固定在一起,横向推板的两端分别同左前悬挂杆与右前悬挂杆连接在一起,横向推板的前侧设有托持板46,前爬坡板的前端设有两把铲刀47;前爬坡板的后端托持在托持板上而抵接在横向推板上且按压气缸伸出到行程终点时,按压气缸的活塞杆48按压在前爬坡板的前端上、两把所述铲刀一一对应地位于左前轮和右前轮的正前方、铲刀同地面之间有10毫米以下的间隙。按压气缸的活塞杆上设有检测汽车前方是否有物体的雷达系统49和吸起前爬坡板的气缸部电磁铁50。铲刀处于铲路面上的物体的状态(即图1的状态)时,铲刀的上表面为前端低后端高的斜面,斜面上设有若干道沿前后方向分布的凸条51,凸条包括第一段52和第二段53,第一段个第二段呈“v”字连接在一起,第一段和第二段的连接点54朝前。横向推板的左右两端设有两个一一对应地位于两个前轮后方的引导前爬坡板上升到前轮上方的导向板55。
31.初始状态时,处于图1状态,即对地面进行清钉的状态。将长度高于1厘米的钉子推到或推到铲刀的上表面,被凸条引导到滚落在将被前车轮碾压到的路面部分的两侧,避免
刺破车轮。雷达系统检测到汽车前方有上端位于前车轮轴线所在的水平面下方且高于间隙的同时横跨在两把所述铲刀之间的阻拦物时,气缸部电磁铁吸起前爬坡板到前爬坡板的高度高于阻拦物、避免铲刀推不开阻拦物而损坏。
32.雷达系统检测到汽车前方有上端位于前车轮轴线所在的平面以上的阻碍物56时,按压气缸收缩到行程终点、前越障机构部前电磁铁吸附前竖滑杆到前滑槽的最前端以进行物流车越过障碍物的过程,前漫反射光电开关在按压气缸收缩到行程终点时才开始工作,按压气缸处于输出状态时停止工作。
33.物流车越过障碍物的具体过程方法为:第一步、物流车前行到前爬坡板的前端搁在障碍物的顶端上且被前漫反射光电开关检测到,前越障机构部前电磁铁失电而失去对前竖滑杆的吸附作用,使得前竖滑杆能够自由滑动;第二步、前轮经前爬坡板行驶到障碍物顶端后继续前行而越过障碍物,前轮越过障碍物后通过前越障机构部后电磁铁吸附前竖滑杆使前爬坡板相对于车体后移到前轮后方,此时前爬坡板处于前端高后端底的状态,使前越障机构部前电磁铁吸附前竖滑杆驱动前竖滑杆前移,前爬坡板前移到后端越过横推板且位于托持板的上方时,驱动气缸伸出到行程终点使得前爬坡板处于前低后高且后端抵接在横推板上的状态;第三步、前爬坡板前行的同时物流车前行使得后爬坡板的前端搁在障碍物的顶端上,障碍物被后漫反射光电开关检测到时后越障机构部前电磁铁失电失去对后竖滑杆的吸附作用,使得后竖滑杆能够自由滑动;第四步、后轮经后爬坡板行驶到障碍物的顶端后继续前行而越过障碍物,后轮越过障碍物后使后越障机构部后电磁铁吸附后竖滑杆使得后爬坡板相对于车体后移到位于后轮的后方而处于前端高后端底的状态,后越障机构部前电磁铁吸附后竖杆使后竖滑杆前移到位于后滑槽的最前端,后竖滑杆前移的过程中驱动后爬坡板越过后轮。
34.最后应说明的是:以上所述仅为本实用新本的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1