驱动单元、操舵单元以及搬运装置的制作方法
1.本实用新型涉及驱动单元、操舵单元以及搬运装置。
背景技术:
2.日本特开2020-44959号公报所记载的车辆驱动装置具有电动马达、副轴齿轮、行星齿轮机构以及轮毂。轮子被轴支承为能够旋转。轴与作为行星齿轮机构的一部分的副轴齿轮结合。
3.在日本特开2020-44959号公报所记载的车辆驱动装置中,轮子支承于行星齿轮机构的一部分。因此,作用于轮子的较大的载荷直接作用于行星齿轮机构。
技术实现要素:
4.本实用新型是鉴于上述课题而完成的,其目的在于提供能够抑制作用于输出壁部的载荷直接作用于驱动机构的驱动单元和操舵单元。
5.第一方式的例示性的驱动单元具有驱动机构、输出部以及支承部。所述驱动机构能够输出绕中心轴线的旋转驱动力。所述输出部与所述驱动机构连接。所述输出部能够绕所述中心轴线旋转。所述输出部具有基座部和输出壁部。所述基座部的至少一部分配置于所述驱动机构的轴向一侧。所述基座部沿具有径向成分的方向扩展。所述输出壁部从所述基座部的径向外缘向轴向另一侧延伸。所述支承部具有支承壁部和结合部。所述支承壁部配置于所述输出壁部的径向内方。所述支承壁部沿轴向延伸。所述结合部配置于所述支承壁部的轴向一端部。所述结合部将所述驱动机构的至少一部分以不能相对旋转的方式支承于所述支承壁部。所述输出壁部的径向内侧面经由轴承而支承于所述支承壁部的径向外侧面。
6.关于第二方式的例示性的驱动单元,在第一方式的驱动单元中,所述轴承具有:第一轴承,其配置于比所述支承壁部的轴向中点靠轴向一侧的位置;以及第二轴承,其配置于比所述支承壁部的轴向中点靠轴向另一侧的位置。
7.关于第三方式的例示性的驱动单元,在第一方式的驱动单元中,所述输出壁部具有:第一区域,其从所述基座部的径向外缘向轴向另一侧延伸;第二区域,其配置于比所述第一区域靠轴向另一侧的位置,沿轴向延伸;以及第三区域,其将所述第一区域的轴向另一端部与所述第二区域的轴向一端部连接。所述轴承支承于所述第二区域的径向内侧面。所述支承壁部的轴向的长度为所述第二区域的轴向的长度以上。
8.关于第四方式的例示性的驱动单元,在第三方式的驱动单元中,所述结合部的径向内侧面与所述驱动机构的径向外侧面连接。
9.关于第五方式的例示性的驱动单元,在第一方式至第四方式的任意一个方式的驱动单元中,所述驱动机构具有:波动发生器,其能够绕所述中心轴线旋转,该波动发生器的与所述中心轴线垂直的截面为非正圆;外齿齿轮,其配置于所述波动发生器的径向外方;以及内齿齿轮,其配置于所述外齿齿轮的径向外方。所述外齿齿轮具有:具有挠性的筒部,其
呈沿轴向延伸的筒状,具有向径向外方延伸的多个外齿;以及隔膜部,其从所述筒部的轴向一侧端部或轴向另一侧端部沿径向延伸。所述内齿齿轮具有向径向内方延伸的多个内齿,该多个内齿与所述多个外齿啮合。所述隔膜部和所述内齿齿轮中的任意一方固定于所述输出部。
10.关于第六方式的例示性的驱动单元,在第一方式至第四方式的任意一个方式的驱动单元中,所述驱动机构具有:第一太阳齿轮,其能够绕所述中心轴线旋转;第一行星齿轮,其配置于所述第一太阳齿轮的径向外方,与所述第一太阳齿轮啮合,能够绕沿着与所述中心轴线平行的方向延伸的第一行星轴线旋转;内齿齿轮,其配置于所述第一行星齿轮的径向外方,与所述第一行星齿轮啮合;第二太阳齿轮,其能够与所述第一行星齿轮联动,能够绕所述中心轴线旋转;以及第二行星齿轮,其配置于所述第二太阳齿轮的径向外方,与所述第二太阳齿轮啮合,能够绕沿着与所述中心轴线平行的方向延伸的第二行星轴线旋转,并且该第二行星齿轮与所述内齿齿轮啮合。所述第二行星齿轮能够与所述输出部联动。所述内齿齿轮固定于所述结合部。
11.关于第七方式的例示性的驱动单元,在第一方式至第四方式的任意一个方式的驱动单元中,所述驱动机构具有:第三太阳齿轮,其能够绕所述中心轴线旋转;行星齿轮,其与所述第三太阳齿轮啮合,具有能够绕与所述中心轴线平行的行星轴线自转的第一齿轮和能够与所述第一齿轮一起绕所述行星轴线自转的第二齿轮;圆环状的固定内齿齿轮,其固定于所述结合部,与所述第一齿轮啮合;圆环状的旋转内齿齿轮,其固定于所述输出部,与所述第二齿轮啮合;以及第三轮架,其将所述行星齿轮支承为能够一边以所述行星轴线为中心进行自转一边以所述中心轴线为中心进行公转。
12.关于第八方式的例示性的驱动单元,在第一方式至第四方式的任意一个方式的驱动单元中,所述支承部具有从所述支承壁部的轴向另一端部向径向外方扩展的凸缘部。
13.关于第九方式的例示性的驱动单元,在第一方式至第四方式的任意一个方式的驱动单元中,所述输出壁部在径向外侧面具有车轮。
14.第十方式的例示性的操舵单元具有第一方式至第九方式的任意一个方式的驱动单元、支承框架以及操舵基座部。所述支承框架固定于所述驱动单元。所述支承框架沿具有径向成分的方向延伸。所述操舵基座部支承所述支承框架。
15.关于第十一方式的例示性的操舵单元,在第十方式的操舵单元中,所述支承框架经由交叉滚子轴承而支承于所述操舵基座部,能够绕与所述中心轴线交叉的操舵轴线旋转。
16.关于第十二方式的例示性的操舵单元,在第十一方式的操舵单元中,所述操舵轴线穿过所述输出壁部中的外径最大的区域。
17.关于第十三方式的例示性的操舵单元,在第十方式至第十二方式的任意一个方式的操舵单元中,所述支承框架配置在所述驱动机构的轴向一端与轴向另一端的轴向之间。
18.关于第十四方式的例示性的操舵单元,在第十方式至第十二方式的任意一个方式的操舵单元中,该操舵单元还在所述输出壁部的径向外侧面具有车轮。所述输出部的轴向一端与所述驱动机构的轴向另一端的轴向长度比所述车轮的外径短。
19.第十五方式的例示性的搬运装置具有第十方式至第十四方式的任意一个方式的操舵单元。
20.根据本实用新型,能够抑制作用于输出壁部的载荷直接作用于驱动机构。并且,在搭载于操舵单元和搬运装置的驱动单元中,能够抑制作用于输出壁部的载荷直接作用于驱动机构。
21.由以下的本实用新型优选实施方式的详细说明,参照附图,可以更清楚地理解本实用新型的上述及其他特征、要素、步骤、特点和优点。
附图说明
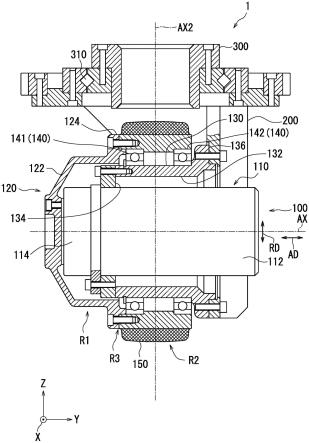
22.图1是示出具有本实施方式的驱动单元的操舵单元的纵剖视图。
23.图2是示出本实施方式的驱动单元的纵剖视图。
24.图3是示出本实施方式的驱动单元的纵剖视图。
25.图4是示出本实施方式的驱动单元的纵剖视图。
26.图5是示出本实施方式的驱动单元的纵剖视图。
27.图6是示出本实施方式的搬运装置的示意性的立体图。
具体实施方式
28.以下,参照附图对本实用新型的实施方式进行说明。另外,在图中,对相同或相当的部分标注相同的标号而不重复进行说明。另外,在图中,为了容易理解,适当地记载了三维正交坐标系的x轴、y轴以及z轴。
29.在本说明书中,将与驱动单元100的中心轴线ax平行的方向记载为“轴向ad”,将与中心轴线ax垂直的方向记载为“径向rd”。另外,“平行的方向”包含大致平行的方向,“垂直的方向”包含大致垂直的方向。
30.参照图1,对具有本实施方式的驱动单元100的操舵单元1进行说明。图1是示出具有本实施方式的驱动单元100的操舵单元1的纵剖视图。
31.如图1所示,操舵单元1具有驱动单元100、支承框架200以及操舵基座部300。操舵单元1例如安装于叉车、无人搬运车(agv:automated guided vehicle)的车身。
32.支承框架200固定于驱动单元100。支承框架200沿具有径向rd成分的方向延伸。在本实施方式中,支承框架200向z方向的正方向延伸。支承框架200经由交叉滚子轴承310而支承于操舵基座部300。支承框架200能够绕与中心轴线ax交叉的操舵轴线ax2旋转。因此,能够具有能够变更驱动单元100的行驶方向的转弯能力。另外,通过安装交叉滚子轴承310,能够减小操舵单元1的操舵轴线ax2方向的长度。
33.操舵轴线ax2穿过输出壁部124中的外径最大的区域。因此,接地点位于操舵轴线ax2上。其结果为,能够抑制由于操舵操作使驱动单元100以接地点为中心摆动与操舵轴线ax2的偏心量。
34.支承框架200配置在驱动机构110的轴向一端与轴向另一端的轴向之间。因此,能够将支承框架200配置于驱动单元100的中央部附近而减轻作用于操舵单元1的力矩。
35.操舵基座部300对支承框架200进行支承。
36.驱动单元100具有驱动机构110、输出部120、支承部130以及轴承140。
37.驱动机构110能够输出绕中心轴线ax的旋转驱动力。驱动机构110具有马达112和减速器114。
38.马达112驱动减速器114。减速器114使马达112的转速减速。具体而言,减速器114将马达112的第一转速的旋转运动转换为比第一转速低的第二转速的旋转运动。
39.输出部120与驱动机构110连接。输出部120能够绕中心轴线ax旋转。
40.输出部120具有基座部122和输出壁部124。
41.基座部122的至少一部分配置于驱动机构110的轴向一侧(-y方向侧)。基座部122沿具有径向rd成分的方向扩展。在本实施方式中,基座部122向径向rd外方且轴向另一侧(+y方向侧)扩展。
42.输出壁部124从基座部122的径向rd外缘向轴向另一侧(+y方向侧)延伸。
43.支承部130具有支承壁部132和结合部134。在本实施方式中,支承部130还具有凸缘部136。
44.支承壁部132配置于输出壁部124的径向rd内方。支承壁部132沿轴向ad延伸。驱动机构110的至少一部分配置于支承壁部132的径向内方。
45.结合部134配置于支承壁部132的轴向一端部(-y方向侧端部)。结合部134将驱动机构110的至少一部分以不能相对旋转的方式支承于支承壁部132。结合部134的径向内侧面与驱动机构110的径向外侧面连接。因此,结合部134能够支承驱动机构110,能够提高同轴度。
46.输出壁部124的径向内侧面经由轴承140而支承于支承壁部132的径向外侧面。特别是,在本实施方式中,驱动机构110经由结合部134而支承于支承壁部132。因此,能够抑制作用于输出壁部124的载荷直接作用于驱动机构110。并且,基座部122仅传递驱动机构110的旋转力即可,在考虑了强度的情况下,能够实现薄型的轻量化构造。
47.凸缘部136从支承壁部132的轴向另一端部(+y方向侧端部)向径向外方扩展。因此,能够稳定地对支承部130进行支承。
48.轴承140具有第一轴承141和第二轴承142。轴承140例如是球轴承。第一轴承141配置于比支承壁部132的轴向中点靠轴向一侧(-y方向侧)的位置。第二轴承142配置于比支承壁部132的轴向中点靠轴向另一侧(+y方向侧)的位置。因此,在支承壁部132的轴向ad的较宽的范围内稳定地承受施加于输出壁部124的载荷。另外,在本实施方式中,支承壁部132的轴向中点的轴向位置与操舵轴线ax2的轴向位置大致相同。
49.输出壁部124具有第一区域r1、第二区域r2以及第三区域r3。第一区域r1从基座部122的径向外缘向轴向另一侧(+y方向侧)延伸。第二区域r2配置于比第一区域r1靠轴向另一侧(+y方向侧)的位置,并沿轴向ad延伸。第三区域r3将第一区域r1的轴向另一端部(+y方向侧端部)与第二区域r2的轴向一端部(-y方向侧端部)连接。轴承140支承于第二区域r2的径向内侧面。支承壁部132的轴向ad的长度为第二区域r2的轴向ad的长度以上。因此,结合部134对驱动机构110的支承位置的自由度提高。在本实施方式中,支承壁部132的轴向ad的长度为第二区域r2的轴向ad的长度与第三区域r3的轴向ad的长度之和以上。
50.输出壁部124在径向外侧面具有车轮150。因此,车轮150能够在抑制作用于接地点的载荷直接作用于输出壁部124的同时进行车身的顺畅的行驶和转弯。
51.输出部120的轴向一端与驱动机构110的轴向另一端的轴向长度比车轮150的外径短。因此,能够使驱动单元100的转弯范围所包含的空间内缩小化,因此能够实现装置(车身)整体的小型化。
52.参照图2,对本实施方式的驱动单元100进行说明。图2是示出本实施方式的驱动单元100的纵剖视图。对于与参照图1说明的驱动单元100重复的部分省略说明。
53.如图2所示,在本实施方式中,驱动机构110具有波动齿轮机构和马达112。驱动机构110具有波动发生器1141、外齿齿轮1142以及内齿齿轮1143。
54.波动发生器1141能够绕中心轴线ax旋转。波动发生器1141的与中心轴线ax垂直的截面为非正圆。
55.外齿齿轮1142配置于波动发生器1141的径向外方。即,波动发生器1141配置在外齿齿轮1142的内部。
56.内齿齿轮1143配置于外齿齿轮1142的径向外方。外齿齿轮1142根据波动发生器1141的旋转而相对于内齿齿轮1143相对旋转。
57.内齿齿轮1143固定于结合部134。
58.外齿齿轮1142具有筒部1144和隔膜部1145。
59.筒部1144具有多个外齿。多个外齿向径向rd外方延伸。筒部1144呈沿轴向ad延伸的筒状。筒部1144具有挠性。
60.隔膜部1145从筒部1144的轴向一侧端部(-y方向端部)沿径向rd延伸。在本实施方式中,隔膜部1145从筒部1144的轴向一侧端部(-y方向端部)向径向rd内方延伸。
61.内齿齿轮1143具有多个内齿。多个内齿向径向rd内方延伸。多个内齿与多个外齿啮合。
62.隔膜部1145固定于输出部120。
63.根据本实施方式,能够通过波动齿轮机构实现较大的减速比,并且能够缩短驱动单元100的轴向长度。并且,与其他减速器相比,能够实现轻量化。另外,特别是在隔膜部1145和输出部120被固定的情况下,能够抑制车轮150的载荷直接作用于波动齿轮机构。
64.参照图3,对本实施方式的驱动单元100进行说明。图3是示出本实施方式的驱动单元100的纵剖视图。对于与参照图1和图2进行了说明的驱动单元100重复的部分,省略说明。
65.如图3所示,驱动机构110具有波动发生器1141、外齿齿轮1142以及内齿齿轮1143。驱动机构110由波动齿轮机构和马达112构成。波动发生器1141配置在外齿齿轮1142的内部。
66.在本实施方式中,隔膜部1145从筒部1144的轴向另一侧端部(+y方向端部)沿径向rd延伸。在本实施方式中,隔膜部1145从筒部1144的轴向另一侧端部(+y方向端部)向径向rd外方延伸。
67.在本实施方式中,内齿齿轮1143固定于输出部120。
68.在本实施方式中,隔膜部1145固定于结合部134。
69.根据本实施方式,能够通过波动齿轮机构实现较大的减速比,并且能够缩短驱动单元100的轴向长度。并且,与其他减速器相比,能够实现轻量化。另外,尤其在内齿齿轮1143和输出部120被固定的情况下,能够抑制车轮150的载荷直接作用于波动齿轮机构。
70.参照图4,对本实施方式的驱动单元100进行说明。图4是示出本实施方式的驱动单元100的纵剖视图。对于与参照图1至图3进行了说明的驱动单元100重复的部分,省略说明。
71.如图4所示,驱动机构110由行星齿轮机构和马达112构成。驱动机构110具有第一太阳齿轮161、第一行星齿轮162、内齿齿轮163、第二太阳齿轮164以及第二行星齿轮165。在
本实施方式中,驱动机构110还具有第一轮架166和第二轮架167。第一太阳齿轮161配置在第一行星齿轮162的内部。
72.第一太阳齿轮161能够绕中心轴线ax旋转。
73.第一行星齿轮162配置于第一太阳齿轮161的径向外方。第一行星齿轮162与第一太阳齿轮161啮合。第一行星齿轮162能够绕沿着与中心轴线ax平行的方向延伸的第一行星轴线ax3旋转。
74.内齿齿轮163配置于第一行星齿轮162的径向外方。内齿齿轮163与第一行星齿轮162啮合。
75.第一行星齿轮162由第一轮架166支承。第一轮架166与第二太阳齿轮164结合。因此,第二太阳齿轮164能够与第一行星齿轮162联动。第二太阳齿轮164能够绕中心轴线ax旋转。
76.第一轮架166将第一行星齿轮162支承为能够一边以行星轴线ax3为中心进行自转一边以中心轴线ax为中心进行公转。
77.第二行星齿轮165配置于第二太阳齿轮164的径向外方。第二行星齿轮165与第二太阳齿轮164啮合。第二行星齿轮165能够绕沿着与中心轴线ax平行的方向延伸的第二行星轴线ax4旋转。第二行星齿轮165与内齿齿轮163啮合。
78.第二行星齿轮165由第二轮架167支承。第二轮架167与输出部120结合。因此,第二行星齿轮165能够与输出部120联动。内齿齿轮163固定于结合部134。另外,输出部120和第二轮架167可以是一体构造,也可以是分体构造。
79.第二轮架167将第二行星齿轮165支承为能够一边以第二行星轴线ax4为中心进行自转一边以中心轴线ax为中心进行公转。
80.根据本实施方式,能够通过2级以上的行星齿轮机构实现较高的减速比。并且,利用单一的内齿齿轮163支承2级以上的行星齿轮,利用结合部134支承内齿齿轮163,由此能够提高旋转精度和同轴度。
81.参照图5,对本实施方式的驱动单元100进行说明。图5是示出本实施方式的驱动单元100的纵剖视图。对于与参照图1至图4进行了说明的驱动单元100重复的部分,省略说明。
82.如图5所示,驱动机构110由差动齿轮机构和马达112构成。驱动机构110具有第三太阳齿轮171、行星齿轮172、固定内齿齿轮173、旋转内齿齿轮174以及第三轮架175。第三太阳齿轮171配置在行星齿轮172的内部。
83.第三太阳齿轮171能够绕中心轴线ax旋转。
84.行星齿轮172具有第一齿轮1721和第二齿轮1722。第一齿轮1721与第三太阳齿轮171啮合。第一齿轮1721能够绕与中心轴线ax平行的行星轴线ax5自转。第二齿轮1722能够与第一齿轮1721一起绕行星轴线ax5自转。第一齿轮1721与第二齿轮1722的齿数是不同的。第一齿轮1721与第二齿轮1722的齿数之差成为减速比。
85.固定内齿齿轮173固定于结合部134。固定内齿齿轮173与第一齿轮1721啮合。固定内齿齿轮173呈圆环状。
86.旋转内齿齿轮174固定于输出部120。旋转内齿齿轮174与第二齿轮1722啮合。旋转内齿齿轮174呈圆环状。
87.第三轮架175将行星齿轮172支承为能够一边以行星轴线ax5为中心进行自转一边
以中心轴线ax为中心进行公转。
88.根据本实施方式,能够抑制作用于输出壁部124的载荷直接作用于驱动机构110。另外,通过利用差动齿轮机构,能够以较少的部件数量实现较高的减速比。并且,能够在轴向ad上较短。
89.参照图6,对本实施方式的搬运装置400进行说明。图6是示出本实施方式的搬运装置400的示意性的立体图。
90.如图6所示,搬运装置400具有操舵单元1。搬运装置400还具有车身410。在本实施方式中,搬运装置400是无人搬运车。另外,搬运装置400也可以是叉车。
91.操舵单元1安装于车身410。根据本实施方式,能够通过操舵单元1使车身410转弯。
92.以上,参照附图(图1~图6)对本实用新型的实施方式进行了说明。本实用新型例如能够利用于驱动单元、操舵单元以及搬运装置。但是,本实用新型并不限定于上述的实施方式,在不脱离其主旨的范围内能够以各种方式来实施。为了容易理解,附图以各自的构成要素为主体示意性地示出,图示的各构成要素的厚度、长度、个数等根据附图制作的方便而与实际不同。另外,上述实施方式所示的各构成要素的材质、形状、尺寸等是一个例子,没有特别限定,能够在实质上不脱离本实用新型的效果的范围内进行各种变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1