换电工作站及船舶电池更换方法与流程
1.本技术涉及换电技术领域,尤其涉及一种换电工作站及船舶电池更换方法。
背景技术:
2.目前电池动力船舶主要采用岸基充电方式进行充电,电池安装在船舶上,码头设置有充电设备,船舶需停靠在码头进行充电。由于船用电池的电量较大,电池充电时间较长,无法满足船舶的连续运行需求,船舶使用效率较低。
技术实现要素:
3.有鉴于此,有必要提供一种换电工作站及船舶电池更换方法。
4.本技术实施例第一方面公开了一种换电工作站,包括:浮台,用于悬浮设置于水域上,所述浮台设有船舶停靠位,所述船舶停靠位用于停靠船舶,并可从停靠的船舶接收亏电的电池,或将满电电池输送至船舶;换电平台,架设在岸边,并始终位于水域上方,所述换电平台设有电池充电区域,所述电池充电区域用于对船舶停靠位接收的亏电电池进行放置并充电,或将充满电的电池向所述船舶停靠位输送;升降平台,在所述换电平台与所述浮台之间升降运行,用于在换电平台和浮台之间输送电池。
5.本技术实施例第二方面公开了船舶电池更换方法,应用于换电工作站,所述换电工作站包括浮台、换电平台及可在所述换电平台与所述浮台之间升降运行的升降平台,所述浮台设有船舶停靠位,所述换电平台上设置有用于对亏电的电池进行放置与充电的电池充电区域。所述方法包括:当接收到船舶停靠位停靠有船舶的第一感测信号及所述船舶的亏电的电池被卸下的第二感测信号时,从所述电池充电区域中随机选择一充满电的电池,并将选中的电池经由所述升降平台及所述浮台输送至所述船舶;将从所述船舶卸下的亏电的电池经由所述浮台及所述升降平台移动至所述电池充电区域。
6.本技术实施例第三方面公开了船舶电池更换方法,应用于换电工作站,所述换电工作站包括浮台、换电平台及可在所述换电平台与所述浮台之间升降运行的升降平台,所述浮台设有船舶停靠位,所述换电平台上设置有用于对亏电的电池进行放置与充电的电池充电区域。所述方法包括:感测所述船舶停靠位是否停靠有船舶;当感测到所述船舶停靠位停靠有船舶时,确定所述船舶是否卸下亏电的电池;当所述船舶的亏电的电池被卸下时,从所述电池充电区域中随机选择一充满电的电池,并将选中的电池经由所述升降平台及所述浮台输送至所述船舶;将从所述船舶卸下的亏电的电池经由所述浮台及所述升降平台移动至所述电池充电区域。
7.上述换电工作站及船舶电池更换方法,换电平台架设在岸边,浮台悬浮设置于水域上,在换电平台与浮台之间设置用来输送电池的升降平台,且换电平台上设置电池充电区域,浮台可随着水域的水位进行升降,实现为停靠于浮台边的船舶输送充满电的电池,或者接收船舶卸下的亏电的电池,并通过升降平台输送至换电平台进行充电,实现在不同水位情形下对船舶电池进行更换,船舶电池的更换效率与便利性高,可满足船舶的连续运行
需求。
附图说明
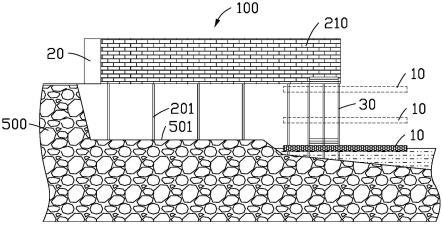
8.图1为本技术一实施例提供的换电工作站的截面图;
9.图2为本技术一实施例提供的浮台的俯视图;
10.图3a为本技术一实施例提供的升降平台在换电平台与浮台之间升降的示意图;
11.图3b为本技术一实施例提供的驱动机构的结构示意图;
12.图4a为本技术一实施例提供的升降平台的结构示意图;
13.图4b为本技术一实施例提供的平台支撑板的截面图;
14.图4c为本技术一实施例提供的升降开关的结构示意图;
15.图5为本技术一实施例提供的换电平台的俯视图;
16.图6为本技术一实施例提供的电池的结构示意图;
17.图7a为本技术另一实施例提供的浮台的俯视图;
18.图7b为本技术一实施例提供的电池在船舶与换电平台之间进行输送的示意图;
19.图8为本技术另一实施例提供的换电工作站的结构示意图;
20.图9为本技术一实施例提供的围栏的结构示意图;
21.图10为本技术另一实施例提供的升降平台的结构示意图;
22.图11为本技术一实施例提供的平台本体与驱动机构的结构示意图;
23.图12为本技术一实施例提供的船舶电池更换方法的步骤流程示意图;
24.图13为本技术另一实施例提供的船舶电池更换方法的步骤流程示意图;
25.图14为本技术一实施例提供的主控制设备的结构示意图。
具体实施方式
26.以下由特定的具体实施例说明本技术的实施方式,本领域技术人员可由本说明书所揭示的内容了解本技术的其他优点及功效。虽然本技术的描述将结合较佳实施例一起介绍,但这并不代表此申请的特征仅限于该实施方式。恰恰相反,结合实施方式作申请介绍的目的是为了覆盖基于本技术的权利要求而有可能延伸出的其它选择或改造。为了提供对本技术的深度了解,以下描述中将包含许多具体的细节。本技术也可以不使用这些细节实施。此外,为了避免混乱或模糊本技术的重点,有些具体细节将在描述中被省略。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
27.以下,如果有用到,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。“上”、“下”、“左”、“右”等方位术语是相对于附图中的部件示意置放的方位来定义的,应当理解到,这些方向性术语是相对的概念,它们用于相对于的描述和澄清,其可以根据附图中部件所放置的方位的变化而相应地发生变化。
28.在本技术中,如果有用到,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连。本文所使用的术语“和/或”包括一个或多个相关的所列项目的
任意的和所有的组合。
29.在下述实施例结合示意图进行详细描述时,为便于说明,表示器件局部结构的图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本技术保护的范围。
30.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术的实施方式作进一步地详细描述。
31.图1示出了本技术一实施例提供的一种换电工作站。
32.请参阅图1,换电工作站100包括浮台10、换电平台20及升降平台30。浮台10浮在水域400的水面上,浮台10可随着水域水位的升降而上下浮动。换电平台20架设在岸边500,且始终位于水域400的上方,保持换电平台20与水域400的水面始终存在一定距离,可避免换电平台20受到水域水位的影响。升降平台30可在换电平台20与浮台10之间升降运行,升降平台30用于在换电平台20和浮台10之间输送电池。
33.例如,如图1所示,浮台10的海拔高度可随着水域400的水位进行升降。换电平台20的底部设置有多个支柱201,每个支柱201处于高海拔位置的一端均与换电平台20固定连接,每个支柱201的另一端嵌入岸基501,支柱201可以是钢材结构、钢筋混凝土结构、混凝土结构等任意高支撑强度的柱形结构。岸基501可以是指位于换电平台20下方的陆地或者混凝土结构,岸基501可以是岸边500的一部分或者河床的一部分。换电平台20设有电池充电区域210,电池充电区域210设置有可对亏电的电池进行充电的充电装置211(如图5所示),充电装置211的数量可以根据实际充电需求进行设定,本技术对此不作限定。充电装置211可以电连接一个或多个充电接口,即一个充电装置211可以同时对一个或多个亏电的电池进行充电。
34.如图2所示,浮台10设有至少一个船舶停靠位101,船舶停靠位101用于停靠船舶200,船舶200为电池动力船舶。船舶停靠位101可从停靠的船舶200接收亏电的电池,或将满电的电池输送至船舶200。船舶停靠位101可以为长条形,位于同一侧的船舶停靠位101可以并排设置。浮台10可以布设在水流相对平缓的水域位置,浮台10设置有多个通孔102,通孔102内可设置有定位杆103,定位杆103可作为浮台10升降的导杆,定位杆103的下端用于固定在指定水域位置的岸基,通过定位杆103限制浮台10在水平方向的移动,浮台10可沿定位杆103上下移动,以满足船舶停靠需求。
35.电池充电区域210可用于对船舶停靠位101接收的亏电的电池进行放置并充电,或将充满电的电池向船舶停靠位101输送。
36.可以理解的是,本实施例的船舶可200可以是电动竹筏。电动竹筏常需要行驶于涨潮落潮非常频繁的水域,导致电动竹筏靠岸点的海拔高度常常处于频繁变化的时候,基于常规的停靠方式,船舶200在岸边的位置就会变换不定,导致电池更换区域距离船舶停靠位置就会一直处于变化状态,进而不利于更换电池。
37.本实施例中,浮台10可以跟随水域400的水位升降,无论处于涨潮落潮时,船舶200始终可以快速停靠于浮台10的船舶停靠位101,而船舶200与换电平台20上电池更换区域的距离始终可以保持不变。当船舶200卸下亏电的电池后,亏电的电池可以运送至浮台10,浮台10上的亏电的电池可以运送至升降平台30,升降平台30将亏电的电池上升运送至换电平台20,换电平台20上的满电的电池运送至升降平台30,升降平台30将满电的电池下降至浮
台10,浮台10上的满电的电池再运送至船舶200,实现对船舶200快速更换电池。
38.当然,在其他实施例中,船舶也可以是客船、商船、货船、游艇、皮筏艇等水上设备,而换电工作站100也可以是应用于水位经常处于变化状态的湖区、河道、江道、海域等水域。
39.如图3a所示,升降平台30包括支撑柱301、平台本体302、驱动机构303及驱动控制设备304。支撑柱301固定于水域400底部的地基,支撑柱301设置有导轨3010,平台本体302与支撑柱301活动连接,平台本体302可沿着导轨3010在换电平台20与浮台10之间升降。驱动机构303与平台本体302连接,驱动机构303还与驱动控制设备304通信连接。例如驱动机构303可以通过有线方式或者无线方式与驱动控制设备304通信连接。驱动控制设备304可控制驱动机构303驱动平台本体302沿着导轨3010在换电平台20与浮台10之间升降。驱动控制设备304可以设置在换电平台20上。
40.驱动机构303驱动平台本体302的升降方式可以是绞车钢丝绳曳引升降、链条式升降、齿轮齿条式升降、液压式升降等,图3a以驱动机构303为绞车钢丝绳曳引升降机构为例进行说明。
41.在一些实施例中,驱动机构303包括动力机构3030及与动力机构3030连接的牵引机构3031。牵引机构3031与平台本体302连接,动力机构3030用于驱动牵引机构3031牵引平台本体302沿着导轨3010上下移动。
42.作为一种可能的实施方式,如图3b所示,动力机构3030为曳引机,动力机构3030包括电动机3034、曳引轮3035及导向轮3036,牵引机构3031可以包括钢丝绳3037及对重装置3038,钢丝绳3037的一端依次通过导向轮3036和曳引轮3035后连接于平台本体302,另一端连接对重装置3038,电动机3034转动带动曳引轮3035转动,驱动钢丝绳3037拖动平台本体302和对重装置3038作相对运动,平台本体302上升,对重装置下降;对重装置上升,平台本体302下降。
43.在一些实施例中,如图3a所示,为了防止平台本体302超速运行或对钢丝绳进行断裂保护,驱动机构303还包括速度传感器3032和制动器3033。速度传感器3032及制动器3033均与驱动控制设备304通信连接。速度传感器3032用于获取平台本体302的运行速率,并将运行速率发送至驱动控制设备304,驱动控制设备304还用于在判断平台本体302的运行速率超过设定速率时,控制制动器3033对平台本体302限制运动。设定速率可以根据升降平台30的实际运行需求进行设定,本技术对此不作限定。
44.速度传感器3032可以设置在平台本体302上或者动力机构3030上,可感测平台本体302相对换电平台20的升降运行速率。制动器3033与平台本体302固定连接,制动器3033还与导轨3010活动连接。当驱动控制设备304判断平台本体302相对换电平台20的升降运行速率超过设定速率时,表明平台本体302运行异常,驱动控制设备304控制制动器3033将平台本体302稳固在导轨3010上,实现限制平台本体302相对于导轨3010的运动。制动器3033的数量可以与导轨3010的数量相等,即每一个导轨3010上对应设置一个制动器3033,以实现制动器3033可将平台本体302有效稳固在导轨3010上。
45.在一些实施例中,浮台10设有与支撑柱301位于低海拔位置一端对接的低位对接部104,换电平台20设有与支撑柱301另一端对接的高位对接部202。平台本体302可分别与低位对接部104和高位对接部202对接,进而使得平台本体302可在换电平台20和浮台10之间输送电池。
46.在一些实施例中,由于浮台10的低位对接部104会随着水域水位升降而升降,即平台本体302的下行停靠位置亦需随着水域水位升降而调整,以使得平台本体302可与低位对接部104对接。升降平台30还包括与浮台10固定连接的第一位置感测件305。第一位置感测件305与驱动控制设备304通信连接,例如第一位置感测件305可以通过有线方式与驱动控制设备304通信连接。第一位置感测件305用于感应平台本体302与浮台10的距离,并输出平台本体302相对浮台10的位置状态至驱动控制设备304,驱动控制设备304可根据第一位置感测件305输出的位置状态控制平台本体302运行。例如,驱动控制设备304可根据第一位置感测件305输出的位置状态控制平台本体302减速,当平台本体302减速至停止时与低位对接部104对接。由于第一位置感测件305与浮台10固定连接,第一位置感测件305可随着浮台10的升降而升降,使得在浮台10的低位对接部104随着水域水位升降而升降的情形下,驱动控制设备304依然可根据第一位置感测件305输出的位置状态控制平台本体302准确与低位对接部104对接。
47.在一些实施例中,第一位置感测件305用于感应平台本体302与浮台10的接近距离,并输出平台本体302相对浮台10的接近位置状态,驱动控制设备304用于根据第一位置感测件305感测到的接近位置状态控制平台本体302减速,实现控制平台本体302在下行到某一指定位置时进行减速,以使得平台本体302与低位对接部104对接。
48.在一些实施例中,第一位置感测件305还用于感应平台本体302与浮台10的对接距离,并输出对接位置状态,驱动控制设备304用于根据第一位置感测件305感测到的对接位置状态控制平台本体302停止,实现控制平台本体302在下行到某一指定位置时停止移动,以使得平台本体302与低位对接部104对接。
49.举例而言,换电平台20上的满电的电池运送至升降平台30,升降平台30将满电的电池下降至浮台10,驱动控制设备304可以控制驱动机构303驱动平台本体302沿着导轨3010向下移动,当平台本体302向下运动至第一位置时,第一位置感测件305输出平台本体302相对浮台10的接近位置状态,驱动控制设备304通过控制驱动机构303使得平台本体302减速,第一位置可以是指第一位置感测件305的安装位置或者与第一位置感测件305处于同一海拔高度的位置,平台本体302相对浮台10的接近位置状态可以是指平台本体302的底部与低位对接部104之间的距离为第一预设距离的位置状态。当平台本体302继续向下运动至第二位置时,第一位置感测件305输出平台本体302相对浮台10的对接位置状态,驱动控制设备304通过控制驱动机构303使得平台本体302停止移动,实现平台本体302准确与低位对接部104对接。第二位置可以是指平台本体302的底部与低位对接部104平齐的位置,平台本体302相对浮台10的对接位置状态可以是指平台本体302的底部与低位对接部104对齐的位置状态。
50.在一些实施例中,升降平台30还包括与支撑柱301固定连接的第二位置感测件306,第二位置感测件306与驱动控制设备304通信连接,例如第二位置感测件306可以通过有线方式或无线方式与驱动控制设备304通信连接。第二位置感测件306用于感应平台本体302与换电平台20的高位对接部202的距离,并输出平台本体302相对高位对接部202的位置状态至驱动控制设备304,驱动控制设备304可根据第二位置感测件306输出的位置状态控制平台本体302运行,使得平台本体302可以准确与换电平台20的高位对接部202对接。
51.在一些实施例中,第二位置感测件306用于感应平台本体302与高位对接部202的
接近距离,并输出平台本体302相对高位对接部202的接近位置状态,驱动控制设备304用于根据第二位置感测件306感测到的接近位置状态控制平台本体302减速,实现控制平台本体302在上行到某一指定位置时进行减速,以使得平台本体302与高位对接部202对接。
52.在一些实施例中,第二位置感测件306还用于感应平台本体302与高位对接部202的对接距离,并输出对接位置状态,驱动控制设备304用于根据第二位置感测件306感测到的对接位置状态控制平台本体302停止,实现控制平台本体302在上行到某一指定位置时停止移动,以使得平台本体302与高位对接部202对接。
53.举例而言,浮台10上的亏电的电池运送至升降平台30,升降平台30将亏电的电池上升运送至换电平台20,驱动控制设备304可以控制驱动机构303驱动平台本体302沿着导轨3010向上移动,当平台本体302向上运动至第三位置时,第二位置感测件306输出平台本体302相对高位对接部202的接近位置状态,驱动控制设备304通过控制驱动机构303使得平台本体302减速,第三位置可以是指第二位置感测件306的安装位置或者与第二位置感测件306处于同一海拔高度的位置,平台本体302相对高位对接部202的接近位置状态可以是指平台本体302的底部与高位对接部202之间的距离为第二预设距离的位置状态。当平台本体302继续向上运动至第四位置时,第一位置感测件305输出平台本体302相对高位对接部202的对接位置状态,驱动控制设备304通过控制驱动机构303使得平台本体302停止移动,实现平台本体302准确与高位对接部202对接。第四位置可以是指平台本体302的底部与高位对接部202平齐的位置,平台本体302相对高位对接部202的对接位置状态可以是指平台本体302的底部与高位对接部202对齐的位置状态。
54.如图4a所示,第一位置感测件305包括连接杆3050、第一传感器安装件3051、第一传感器3052及第二传感器3053。连接杆3050的一端与第一传感器安装件3051固定连接,连接杆3050的另一端与浮台10固定连接。第一传感器3052固定设置在第一传感器安装件3051上,第一传感器3052用于感应平台本体302与浮台10的接近距离。第二传感器3053固定设置在第一传感器安装件3051上,第二传感器3053用于感应平台本体302与浮台10的对接距离。第二传感器3053可以位于第一传感器3052的下方。第一传感器安装件3051与支撑柱301活动连接,第一传感器安装件3051可随着浮台10的升降而沿着支撑柱301上下移动,即第一传感器3052与第二传感器3053可随着浮台10的升降而升降,使得在浮台10的低位对接部104随着水域水位升降而升降的情形下,驱动控制设备304仍然可以基于第一传感器3052与第二传感器3053的感测信号控制平台本体302准确与低位对接部104对接。在其他实施例中,第二传感器3053也可以省略,此种情形下,驱动控制设备304用于根据第一传感器305感测到的接近位置状态(平台本体302相对低位对接部104的接近位置状态)控制平台本体302减速直至停止,使得平台本体302与低位对接部104对接。
55.在一些实施例中,支撑柱301上设有滑动方通3011,第一传感器安装件3051套设在滑动方通3011上,进而第一传感器安装件3051可随着浮台10的升降而沿着滑动方通3011上下移动。
56.第二位置感测件306包括第二传感器安装件3060、第三传感器3061及第四传感器3062。第二传感器安装件3060与支撑柱301固定连接,第三传感器3061固定设置在第二传感器安装件3060上。第三传感器3061用于感应平台本体302与高位对接部202的接近距离。第四传感器3062固定设置在第二传感器安装件3060上,第四传感器3062用于感应平台本体
302与高位对接部202的对接距离。第三传感器3061可以位于第四传感器3062的下方。在其他实施例中,第四传感器3062也可以省略,此种情形下,驱动控制设备304用于根据第三传感器3061感测到的接近位置状态(平台本体302相对高位对接部202的接近位置状态)控制平台本体302减速直至停止,实现平台本体302与高位对接部202对接。
57.在一些实施例中,平台本体302设有平台支撑板3020和相对平台支撑板3020开合的限位件3021,限位件3021与支撑柱301滑动配合。当限位件3021相对平台支撑板3020闭合时,限制电池移出或移入平台支撑板3020;当限位件3021相对平台支撑板3020打开时,允许电池移出或移入平台支撑板3020。
58.作为一种可能的实施方式,平台支撑板3020设有门导轨3022,限位件3021设有可沿着门导轨3022上下移动的拉动门3023,当拉动门3023相对平台支撑板3020闭合时,限制电池移出或移入平台支撑板3020;当拉动门3023相对平台支撑板3020打开时,允许电池移出或移入平台支撑板3020。
59.在一些实施例中,平台支撑板3020可以设有两个门导轨3022,限位件3021设有可分别沿着两个门导轨3022上下移动的两个拉动门3023,两个拉动门3023相对设置。当平台本体302与高位对接部202对接时,位于换电平台20上的工作人员可以通过打开一侧的拉动门3023,将电池移出或移入平台支撑板3020。当平台本体302与低位对接部104对接时,位于浮台10上的工作人员可以通过打开另一侧的拉动门3023,将电池移出或移入平台支撑板3020。
60.在一些实施例中,平台本体302还设有固定于平台支撑板3020的接近传感器3024,接近传感器3024与驱动控制设备304通信连接,例如,接近传感器3024通过有线方式或无线方式与驱动控制设备304通信连接。接近传感器3024用于感应拉动门3023相对平台支撑板3020的接近距离,并输出拉动门3023相对平台支撑板3020的开合状态,驱动控制设备304还用于根据接近传感器3024感测到的拉动门3023相对平台支撑板3020的开合状态控制平台本体302运行。例如,当接近传感器3024感测到拉动门3023相对平台支撑板3020处于闭合状态时,驱动控制设备304可控制平台本体302运行,当接近传感器3024感测到拉动门3023相对平台支撑板3020处于打开状态或未闭合到位时,驱动控制设备304控制平台本体302暂停运行,可避免工作人员在平台本体302运行期间进入到平台支撑板3020,或者在平台本体302运行期间将电池移出或移入平台支撑板3020,发生安全事故。
61.在一些实施例中,如图4b所示,平台支撑板3020还可设置有重量报警装置3025,重量报警装置3025可以包括重量检测模块3026及报警模块3027,重量检测模块3026与报警模块3027电连接,重量检测模块3026可以包括压力传感器及控制器,报警模块3027可以包括蜂鸣器,控制器可以根据压力传感器的感测数据控制蜂蜜器发声或者不发声。报警模块3027也可以设置在平台本体302的内壁上。重量检测装置3025用于检测平台支撑板3020上的物体的重量,并可在检测到平台支撑板3020上的物体的重量超过预设重量时,输出第一告警信息。重量报警装置3025还可与驱动控制设备304通信连接,驱动控制设备304还用于在平台支撑板3020上的物体的重量超过预设重量时,控制驱动机构303暂停驱动平台本体302移动,避免升降平台30由于过载发生安全事故。第一告警信息可以是声/光告警信息。预设重量可以根据平台支撑板3020可承受的重量及驱动机构303的驱动力大小进行设定。
62.例如,当重量检测模块3026检测到平台支撑板3020上的物体的重量超过预设重量
时,报警模块3027发出声音报警信息,驱动控制设备304控制驱动机构303暂停驱动平台本体302移动,当平台支撑板3020上的物体的重量恢复至小于预设重量时,报警模块3027停止发出声音报警信息,驱动控制设备304可控制驱动机构303驱动平台本体302移动。
63.在一些实施例中,如图4c所示,升降平台30还可包括与驱动控制设备304通信连接的升降开关307。驱动控制设备304可根据升降开关307的控制指令控制驱动机构303驱动平台本体302沿着导轨3010上下移动或者停止移动。例如,升降开关307为按钮开关,按钮开关内部包括用于输出开关按动提示的发光二极管,当工作人员按动按钮开关时,发光二极管被点亮。
64.在一些实施例中,升降开关307可以包括依次排列的上行开关3071、下行开关3072及急停开关3073。上行开关3071用于输出控制平台本体302上行的控制指令,驱动控制设备304可根据上行开关3071的控制指令控制驱动机构303驱动平台本体302沿着导轨3010从低位对接部104移动至高位对接部202。下行开关3072用于输出控制平台本体302下行的控制指令,驱动控制设备304可根据下行开关3072的控制指令控制驱动机构303驱动平台本体302沿着导轨3010从高位对接部202移动至低位对接部104。急停开关3073用于输出控制平台本体302紧急停止的控制指令,驱动控制设备304可根据急停开关3073的控制指令控制驱动机构303将平台本体302停止。
65.在一些实施例中,工作人员还可以通过随身携带的设备(例如手机)与驱动控制设备304通信,实现远程控制驱动机构303驱动平台本体302沿着导轨3010上下移动或者停止移动。例如,驱动控制设备304可以配置是否开启远程控制功能,当开启远程控制功能时,允许手机向驱动控制设备304发送控制指令,以远程控制平台本体302的运行。为了避免多个设备同时请求控制平台本体302的运行,驱动控制设备304可以预先设定有配对锁定规则,当某一设备与驱动控制设备304建立通信连接之后,其他设备无法再与驱动控制设备304建立通信连接。
66.如图5所示,换电平台20还设有平台状态监控装置203。平台状态监控装置203可以包括主控制设备2030及中控显示屏2031,中控显示屏2031可以包括显示面板及扬声器,主控制设备2030可以是计算机、服务器等设备。扬声器也可以独立于中控显示屏2031,主控制设备2030分别控制中控显示屏2031显示内容及控制扬声器发声。中控显示屏2031与主控制设备2030通信连接,例如中控显示屏2031通过有线方式与主控制设备2030通信连,主控制设备2030可以控制中控显示屏2031显示与换电平台20关联的信息、与升降平台30关联的信息、与电池关联的信息等。例如,中控显示屏2031可以显示换电平台20的通风信息、温度信息、报警信息,电池的充电状态,升降平台30的运行信息等。
67.在一些实施例中,主控制设备2030与充电装置211通信连接,连接方式可以是有线连接或者无线连接,主控制设备2030用于获取充电装置211的工作状态信息,及通过控制中控显示屏2031对充电装置211的工作状态信息进行可视化显示。充电装置211的工作状态信息可以包括是否连接有电池(例如连接有电池为占用状态,未连接有电池为空闲状态)以及电池的充电状态(例如充满电、充电中)。
68.例如,主控制设备2030可以控制中控显示屏2031以图表的形式展现每个充电装置211的工作状态,便于工作人员了解每个充电装置211的使用情况。充电装置211上也可以设置有状态灯,充电装置211可以根据电池的充电状态控制状态灯显示不同的颜色,例如充电
中状态灯显示为红色,充满电状态灯显示为绿色,进一步方便工作人员了解电池的充电情况,便于工作人员及时将已充满电的电池更换为亏电的电池进行充电。
69.在一些实施例中,充电装置211还可获取亏电的电池的充电状态信息,并将充电状态信息传送给主控制设备2030。充电状态信息可以包括电量、充电电流、充电电压等信息。主控制设备2030还用于判断亏电的电池的电量是否大于预设电量,预设电量可以根据电池的实际参数性能进行设定。当亏电的电池的电量大于预设电量,主控制设备2030控制充电装置211停止对亏电的电池进行充电,实现在亏电的电池的充电量达到一定电量时自动断开充电,保证电池安全。例如,当亏电的电池的荷电状态(state of charge,soc)大于95%时,主控制设备2030控制充电装置211停止对亏电的电池进行充电。
70.主控制设备2030还用于判断亏电的电池的充电电流(充电电压)是否大于预设电流(预设电压),预设电流(预设电压)可以根据电池的实际参数性能进行设定。当亏电的电池的充电电流(充电电压)大于预设电流(预设电压),主控制设备2030可以判定该亏电的电池为异常充电的电池,主控制设备2030控制充电装置211停止对亏电的电池进行充电,以保证电池充电安全。主控制设备2030还可控制中控显示屏2031输出第一报警信息,以提示工作人员对异常充电的电池进行处理。第一报警信息可以包括文字警示信息以及与该亏电的电池所连接的充电装置211的编号信息,以便于工作人员快速定位异常充电的电池。
71.在一些实施例中,换电平台20还包括配电装置204,配电装置204电连接外部电网(例如市电),配电装置204还与充电装置211、驱动控制设备304、驱动机构303及平台状态监控装置203电连接,配电装置204用于为充电装置211、驱动控制设备304、驱动机构303及平台状态监控装置203供电。配电装置204还可检测充电装置211、驱动控制设备304、平台状态监控装置203等用电设备是否存在电力故障,当某个用电设备出现电力故障时,配电装置204可及时切断对其供电,电力故障可以包括过流故障、短路故障等。例如,当配电装置204检测到充电装置211存在电力故障时,配电装置204断开对充电装置211的供电,当配电装置204检测到驱动控制设备304存在电力故障时,配电装置204断开对驱动控制设备304的供电。
72.在一些实施例中,配电装置204还可通过有线方式或者无线方式与平台状态监控装置203通信连接,配电装置204还可将检测到的电力故障信息传送给平台状态监控装置203,平台状态监控装置203可根据电力故障信息输出电力故障报警。电力故障报警可以包括声音和/或文字等报警信息。例如,当配电装置204检测到充电装置211存在电力故障时,配电装置204断开对充电装置211的供电,及将充电装置211的电力故障信息传送给平台状态监控装置203,平台状态监控装置203可以输出充电装置211存在电力故障的报警信息。
73.在一些实施例中,驱动控制设备304还可通过有线方式或无线方式与平台状态监控装置203通信连接,驱动控制设备304还用于获取驱动机构303的运行状态,并将驱动机构303的运行状态信息发送至平台状态监控装置203。平台状态监控装置203还用于对驱动机构303的运行状态信息进行可视化显示,或者基于驱动机构303的运行状态信息确定驱动机构303异常运行时,输出升降异常报警。例如,可以通过中控显示屏2031显示驱动机构303运行正常或者运行异常,当驱动机构303无法驱动平台本体302正常升降时,主控制设备2030可以控制中控显示屏2031输出升降异常报警。
74.在一些实施例中,换电平台20还设有起火监测装置205。起火监测装置205用于监
测位于电池充电区域210的电池是否起火,及在监测到起火的电池时,输出电池起火报警。电池起火报警可以是声和/或光告警,以提醒换电站工作人员快速处置。例如,起火监测装置205包括烟雾传感器及声光报警器,电池充电区域210可以为平台20上的一个房间,该房间布设有至少一个充电装置211,烟雾传感器可以设置在房顶,声光报警器可以设置在墙壁上。
75.在一些实施例中,起火监测装置205还可与平台状态监控装置203通信连接,连接方式可以是有线连接或者无线连接,起火监测装置205可以将火灾监测结果传送给平台状态监控装置203。平台状态监控装置203还用于基于监测结果确定电池充电区域210存在起火的电池时,输出电池起火报警。例如,可以通过平台状态监控装置203中的中控显示屏2031输出电池起火的文字/声音报警信息。
76.在一些实施例中,电池充电区域210还设置有灭火装置212,灭火装置212与起火监测装置205电连接。当起火监测装置205监测到起火的电池时,灭火装置212可以自动开启,释放灭火剂,以对起火的电池进行灭火。例如,电池充电区域210为平台20上的一个房间,灭火装置212为喷淋装置,灭火装置212的喷淋头设置在房顶,起火监测装置205监测到起火的电池时,输出起火感测信号至灭火装置212,灭火装置212根据起火感测信号开启喷淋头喷水,以对起火的电池进行灭火。
77.在一些实施例中,灭火装置212还可与主控制设备2030通信连接,连接方式可以是有线连接或者无线连接,当起火监测装置205监测到起火的电池时,主控制设备2030控制灭火装置212开启,以对起火的电池进行灭火。灭火装置212还可以包括灭火器,灭火器可以放置在房间地面或者房间内的架子上,便于换电站工作人员手动开启灭火器,以对起火的电池进行灭火。
78.在一些实施例中,换电平台20还设有温度传感器206、通风设备207及通风控制设备208。温度传感器206及通风设备207与通风控制设备208通信连接。温度传感器206、通风设备207及通风控制设备208与配电装置204电连接,配电装置204用于为温度传感器206、通风设备207及通风控制设备208供电。由于电池充电会产生热量,且电池的充电效率、充电安全性与环境温度具有一定关系,温度传感器206及通风设备207可以设置在电池充电区域210。温度传感器206用于感测电池充电区域210的环境温度,通风控制设备208用于根据温度传感器206感测到的环境温度控制通风设备207的运行状态,以调节电池充电区域210的环境温度,提升电池的充电效率与充电安全性。通风设备207可以是风机、空调等设备,控制通风设备207的运行状态可以是指是否开启通风设备207,调整通风设备207的转速、温度等。
79.在一些实施例中,通风控制设备208还可通过有线方式或者无线方式与平台状态监控装置203通信连接,通风控制设备208还用于获取通风设备207的运行状态,并将通风设备207的运行状态信息传送给平台状态监控装置203。平台状态监控装置203用于对通风设备207的运行状态信息进行可视化显示,或者基于运行状态信息确定通风设备207异常运行时,输出通风异常报警。例如,可以通过中控显示屏2031显示风机的转速、空调的温度等信息,当无法开启或者关闭通风设备207,或者无法调整通风设备207的运行参数时,主控制设备2030可以控制中控显示屏2031输出通风异常报警。在其他实施例中,通风控制设备208也可以省略,温度传感器206及通风设备207与主控制设备通信连接,连接方式可以是有线连
接或者无线连接,主控制设备可根据温度传感器206感测到的环境温度控制通风设备207的运行状态。
80.在一些实施例中,换电平台20还设有电池维保区域213,电池维保区域213设置有电池检测装置2130。电池检测装置2130可用于对位于电池维保区域213内的电池进行状态检测,并输出检测结果。检测结果可以包括电池是否出现故障、出现的故障类型、电池维保建议(例如添加电解液)中的至少一者。例如,电池维保区域213为平台20上的另一个房间,该房间内设置有电池检测装置2130,从船舶上卸下的亏电电池可以移动至电池维保区域213进行状态检测,或者利用充电装置211对亏电的电池进行充电时,充电装置211检测到电池充电异常时,工作人员可以将该充电异常的电池移动至电池维保区域213进行状态检测。
81.在一些实施例中,电池维保区域213还设置有电池维保装置2131,电池维保装置2131可根据电池检测装置2130的检测结果对电池进行维修或者保养。例如,电池维保装置2131包括电池维修设备及电池保养设备,当电池检测装置2130检测到电池出现故障时,电池维修设备可以根据故障检测结果对电池进行维修;当电池检测装置2130检测到电池需要添加电解液时,电池保养设备可以为电池添加电解液。电池维保装置2131还可与电池检测装置2130通信连接,以实现获取电池检测装置2130对电池进行检测的检测结果。
82.在一些实施例中,换电平台20还设置有电池输送设备209。电池输送设备209的一端设置在换电平台20的第一位置,另一端设置在换电平台20的第二位置,电池输送设备209用于在第一位置和第二位置之间输送电池。例如,第一位置位于电池充电区域210,第二位置临近高位对接部202,电池输送设备209为输送履带,通过输送履带实现在电池充电区域210与升降平台30之间快速地运输电池,缩短电池充电时间或者换电时间。
83.如图6所示,为了实现快速对船舶200的电池300进行更换,减少船舶换电的操作时间,电池300可以设计为推车式电池包或者拖车式电池包。电池300可以包括滚轮3001、转向轮3002、电池本体3003、推把手3004及连接头3005,通过滚轮3001和转向轮3002实现电池300的移动、转向,从而使得电池在平台和船舶之间方便、快速的移动。电池300还可以通过连接头3005实现快速拔插,可使得电池300与充电装置211或者船舶200之间的快速连接、拆卸,以减少电池换电、充电的操作时间。
84.在一些实施例中,如图7a所示,浮台10上还设置有上岸离岸装置105,上岸离岸装置105可活动地设置于浮台10的边缘。当上岸离岸装置105处于第一状态时,上岸离岸装置105搭接于船舶200和浮台10之间,以供电池在浮台10的边缘和船舶200之间作离岸或上岸行驶;当上岸离岸装置105处于第二状态时,上岸离岸装置105断开船舶200和浮台10之间的连接,以阻止电池在浮台10的边缘和船舶200之间作离岸或上岸行驶。例如,上岸离岸装置105为可折叠搭板,可折叠搭板包括展开状态及折叠状态,当可折叠搭板处于展开状态时,可折叠搭板搭接于船舶200和浮台10之间,当可折叠搭板处于折叠状态时,断开船舶200和浮台10之间的连接。可折叠搭板可以是人工折叠搭板、电力驱动折叠搭板、或者液压驱动折叠搭板。
85.在一些实施例中,浮台10还设置有接近感应装置106及上岸离岸控制设备107,接近感应装置106固定设置于浮台10的边缘或者船舶停靠位101的边缘。上岸离岸装置105及接近感应装置106与上岸离岸控制设备107通信连接,当接近感应装置106感应到船舶200与浮台10(或船舶停靠位101)的距离在预设距离内且持续时间大于预设时间时,表明浮台10
停靠有船舶200,上岸离岸控制设备107可以控制上岸离岸装置105进入第一状态,上岸离岸装置105搭接于船舶200和浮台10之间。预设时间可以根据实际需求进行设定,本技术对此不作限定,例如预设时间为2分钟。接近感应装置106可以包括接近传感器,当接近传感器感应到船舶停靠位101停靠有船舶200时,可以输出感应信号至上岸离岸控制设备107。
86.在一些实施例中,上岸离岸控制设备107也可以省略,由主控制设备控制上岸离岸装置105的运行。上岸离岸装置105还可以包括吊装机构,工作人员可以操控吊装机构将船舶的亏电的电池吊装至船舶停靠位101,或将满电的电池从船舶停靠位101吊装至船舶200。
87.如图7b所示,位于电池充电区域210的电池300可以经由升降平台30及上岸离岸装置105输送至船舶200,或者从船舶200卸下的电池300可以经由上岸离岸装置105及升降平台30输送至电池充电区域210。
88.如图8所示,换电工作站100还可以包括多个升降平台30,多个升降平台30可以独立运行,可满足换电需求量较高的应用场景。升降平台30的数量本技术不作限定,可以根据实际需求进行设定。由于每个升降平台30独立运行,某一升降平台30出现故障时不会影响其他升降平台30的运行,从而可以保证电池300可以及时的在浮台10与换电平台20之间输送。
89.多个升降平台30可以均架设在浮台10上。每个升降平台30与浮台10固定连接,且与换电平台20活动连接,使得升降平台30可以随着浮台10的升降而升降。通过将升降平台30架设在浮台10上,使得升降平台30不会与水域发生直接接触,避免水域对升降平台30的腐蚀,可以延长升降平台30的使用寿命,使得升降平台30可以安全稳定地运行。
90.在一些实施例中,浮台10上还可设有围栏108,升降平台30位于围栏108内,可以避免工作人员在升降平台30运行期间进入或者靠近升降平台30,避免发生安全事故。围栏108的数量可以与升降平台30的数量相同,即每个升降平台30可以对应一个围栏108。
91.如图9所示,围栏108可以包括围栏本体1081及围栏门1082,围栏门1082与围栏本体1081活动连接。围栏门1082可以相对围栏本体1081呈打开或者闭合状态。
92.如图10所示,升降平台30可以包括支撑柱301、平台本体302、驱动机构303、驱动控制设备304及第一滑动件308。支撑柱301固定设置于浮台10上,第一滑动件308与支撑柱301固定连接。第一滑动件308还与换电平台20活动连接,支撑柱301可通过第一滑动件308随着浮台10的升降而上下移动。第一滑动件308与换电平台20的活动连接方式本技术对此不作限定,例如,第一滑动件308可以设有滑轮,换电平台20可以设有与滑轮适配的滑轨,滑轮可随着浮台10的升降而沿着滑轨上下滑动,实现升降平台30可以随着浮台10的升降而升降。驱动控制设备304可以设置在换电平台20或者浮台10上。
93.支撑柱301可以包括支撑柱本体3012及固定设置在支撑柱本体3012上的齿条3013,驱动机构303与平台本体302固定连接。支撑柱本体3012设置有导轨3010。驱动机构303可用于驱动平台本体302沿着齿条3013及导轨3010上下移动。
94.在一些实施例中,升降平台30可以包括两个平台本体302及两个驱动机构303。两个平台本体302可以相对设置,两个平台本体302可以相对独立地在换电平台20与浮台10之间升降。
95.如图11所示,驱动机构303可以包括驱动器3039及齿轮3040,齿轮3040可以与齿条3013相啮合,驱动器3039用于驱动齿轮3040沿着齿条3013上下移动,进而齿轮3040可以带
动平台本体302上下移动。
96.驱动机构303还可以包括第二滑动件3041,第二滑动件3041可以与支撑柱本体3012活动连接,使得平台本体302可通过第二滑动件3041沿着导轨3010在换电平台20与浮台10之间升降。第二滑动件3041的数量可以根据实际需求进行设定,本技术对此不作限定。通过设置第二滑动件3041,可以减小平台本体302相对支撑柱本体3012移动时的摩擦力,便于驱动机构303驱动平台本体302沿着齿条3013及导轨3010上下移动。
97.平台本体302可设有平台支撑板3020和相对平台支撑板3020开合的限位件3021,限位件3021可与支撑柱301滑动配合。当限位件3021相对平台支撑板3020闭合时,限制电池移出或移入平台支撑板3020;当限位件3021相对平台支撑板3020打开时,允许电池移出或移入平台支撑板3020。
98.请再次参阅图10,第一位置感测件305可以与浮台10固定连接,第一位置感测件305还与驱动控制设备304通信连接,例如第一位置感测件305可以通过有线方式与驱动控制设备304通信连接。第一位置感测件305用于感应平台本体302与浮台10的距离,并输出平台本体302相对浮台10的位置状态至驱动控制设备304,驱动控制设备304可根据第一位置感测件305输出的位置状态控制平台本体302运行。例如,驱动控制设备304可根据第一位置感测件305输出的位置状态控制平台本体302减速,当平台本体302减速至停止时与低位对接部104对接。
99.例如,第一位置感测件305用于感应平台本体302与浮台10的接近距离,并输出平台本体302相对浮台10的接近位置状态,驱动控制设备304用于根据第一位置感测件305感测到的接近位置状态控制平台本体302减速,实现控制平台本体302在下行到某一指定位置时进行减速,以使得平台本体302与低位对接部104对接。第一位置感测件305还用于感应平台本体302与浮台10的对接距离,并输出对接位置状态,驱动控制设备304用于根据第一位置感测件305感测到的对接位置状态控制平台本体302停止,实现控制平台本体302在下行到某一指定位置时停止移动,以使得平台本体302与低位对接部104对接。例如,驱动器3039为带刹车减速电机,驱动控制设备304可根据第一位置感测件305感测到的对接位置状态控制驱动器3039停止转动并保持力矩,实现控制平台本体302在下行到某一指定位置时停止移动。驱动器3039使用带刹车减速电机,可以实现在突发断电情况下电机自动抱死并保持力矩,防止平台本体302发生坠落。
100.举例而言,第一位置感测件305包括第一传感器安装件3051、第一传感器3052及第二传感器3053。第一传感器安装件3051与浮台10固定连接,第一传感器3052固定设置在第一传感器安装件3051上,第一传感器3052用于感应平台本体302与浮台10的接近距离。第二传感器3053固定设置在第一传感器安装件3051上,第二传感器3053用于感应平台本体302与浮台10的对接距离。第二传感器3053可以位于第一传感器3052的下方。
101.第二位置感测件306可以与换电平台20固定连接,第二位置感测件306还与驱动控制设备304通信连接,例如第二位置感测件306可以通过有线方式或无线方式与驱动控制设备304通信连接。第二位置感测件306用于感应平台本体302与换电平台20的高位对接部202的距离,并输出平台本体302相对高位对接部202的位置状态至驱动控制设备304,驱动控制设备304可根据第二位置感测件306输出的位置状态控制平台本体302运行,使得平台本体302可以准确与换电平台20的高位对接部202对接。
102.例如,第二位置感测件306用于感应平台本体302与高位对接部202的接近距离,并输出平台本体302相对高位对接部202的接近位置状态,驱动控制设备304用于根据第二位置感测件306感测到的接近位置状态控制平台本体302减速,实现控制平台本体302在上行到某一指定位置时进行减速,以使得平台本体302与高位对接部202对接。第二位置感测件306还用于感应平台本体302与高位对接部202的对接距离,并输出对接位置状态,驱动控制设备304用于根据第二位置感测件306感测到的对接位置状态控制平台本体302停止,实现控制平台本体302在上行到某一指定位置时停止移动,以使得平台本体302与高位对接部202对接。
103.举例而言,第二位置感测件306包括第二传感器安装件3060、第三传感器3061及第四传感器3062。第二传感器安装件3060与换电平台20固定连接,第三传感器3061固定设置在第二传感器安装件3060上。第三传感器3061用于感应平台本体302与高位对接部202的接近距离。第四传感器3062固定设置在第二传感器安装件3060上,第四传感器3062用于感应平台本体302与高位对接部202的对接距离。第三传感器3061可以位于第四传感器3062的下方。
104.请再次参阅图11,平台本体302还可设有接触件3028,接触件3028的一端与平台本体302固定连接,接触件3028的另一端可与第一位置感测件305或者第二位置感测件306相接触。例如,当接触件3028的另一端与第一位置感测件305相接触时,第一位置感测件305输出第一感测信号,当接触件3028的另一端与第二位置感测件306相接触时,第二位置感测件306输出第二感测信号。驱动控制设备304可根据第一感测信号及第二感测信号控制平台本体302运行。
105.例如,第一位置感测件305包括第一传感器3052及第二传感器3053。接触件3028的另一端可与第一传感器3052或者第二传感器3053相接触,进而可以触发第一传感器3052或者第二传感器3053输出相应的感测信号。第二位置感测件306包括第三传感器3061及第四传感器3062,接触件3028的另一端还可与第三传感器3061或者第四传感器3062相接触,进而可以触发第三传感器3061或者第四传感器3062相接触输出相应的感测信号。
106.参照图12所示,为本技术一实施例提供的一种船舶电池更换方法的流程示意图。该船舶电池更换方法可应用于换电工作站100,以实现对船舶200进行快速换电。换电工作站100包括浮台10、换电平台20及可在换电平台20与浮台10之间升降运行的升降平台30,浮台10设有船舶停靠位101,换电平台20上设置有可对亏电的电池进行放置与充电的电池充电区域210。本实施例中,船舶电池更换方法可以包括:
107.步骤s101、当接收到船舶停靠位101停靠有船舶200的第一感测信号及船舶200的亏电的电池被卸下的第二感测信号时,从电池充电区域210中随机选择一充满电的电池,并将选中的电池经由升降平台30及浮台10输送至船舶200。
108.在一些实施例中,船舶停靠位101的边缘可以设置有接近传感器,通过接近传感器来实现感测船舶停靠位101是否停靠有船舶200。主控制设备2030可以通过与接近传感器通信,来实现接收船舶停靠位101停靠有船舶200的第一感测信号。船舶200可以与主控制设备2030建立通信连接,船舶200搭载的船舶系统可以感测电池是否被卸下。当船舶200的亏电的电池被卸下时,船舶200可以发送第二感测信号至主控制设备2030,使得主控制设备2030可以接收到船舶200的亏电的电池被卸下的第二感测信号。当主控制设备2030接收到船舶
停靠位101停靠有船舶200的第一感测信号及船舶200的亏电的电池被卸下的第二感测信号时,表明该船舶200具有换电需求,主控制设备2030可以从电池充电区域210中随机选择一充满电的电池输送至船舶200。例如,每个电池包括滚轮,可自主移动,且具有路径规划模块、感知模块及通信模块,感知模块可获取电池的起始位置、终点位置及周围环境信息,路径规划模块可根据电池的起始位置、终点位置及周围环境信息规划电池从起始位置移动至终点位置的全局路径,电池可以根据全局路径进行自主移动。感知模块可以包括激光雷达模块或者摄像头模块,路径规划模块可以包括微处理器、存储设备等,存储设备存储有路径规划算法。主控制设备2030同样具有通信模块,以与电池通信,主控制设备2030还设置有调度管理系统,该调度管理系统可对多个电池实行控制和调度。
109.在一些实施例中,为了使得充满电的电池从电池充电区域210输送至船舶200,可以先将充满电的电池从电池充电区域210中输送至高位对接部202,经由高位对接部202进入平台本体302并输送至低位对接部104,再由低位对接部104移动至停靠有船舶200的船舶停靠位101,再将船舶停靠位101的充满电的电池移动至船舶200。例如,当主控制设备2030从电池充电区域210中随机选择一充满电的电池时,调度管理系统可以为该充满电的电池生成调度任务,调度任务包括任务起点(电池充电区域210)和任务终点(停靠有船舶200的船舶停靠位101),电池还可以与驱动控制设备304通信,以实现获取平台本体302的运行信息,便于电池进出平台本体302,进而可以实现控制充满电的电池从电池充电区域210经由升降平台30自主移动至停靠有船舶200的船舶停靠位101。
110.在一些实施例中,浮台10设置有上岸离岸装置105,上岸离岸装置105可以设置在船舶停靠位101。当充满电的电池从电池充电区域210移动至船舶停靠位101之后,主控制设备2030还可以控制上岸离岸装置105将船舶停靠位101的充满电的电池移动至船舶200。例如,上岸离岸装置105为吊装机构,主控制设备2030通过控制吊装机构将充满电的电池从船舶停靠位101的移动至船舶200。
111.在一些实施例中,上岸离岸装置105还可以是可搭接于船舶停靠位101的边缘与船舶200之间的可折叠搭板,以供电池在船舶停靠位101的边缘和船舶200之间作离岸或上岸行驶。充满电的电池还可以通过上岸离岸装置105从船舶停靠位101自主移动至船舶200。
112.步骤s102、将从船舶200卸下的亏电的电池经由浮台10及升降平台30移动至电池充电区域210。
113.在一些实施例中,电池充电区域210设置有一个或多个充电装置211,当船舶200的亏电的电池被卸下时,可以将亏电的电池经由浮台10及升降平台30移动至电池充电区域210,以对亏电的电池进行充电。为了使得亏电的电池从船舶200移动至电池充电区域210,可以先将亏电的电池从船舶200移动至船舶停靠位101,再将船舶停靠位101的亏电的电池移动至低位对接部104,经由低位对接部104进入平台本体302并输送至高位对接部202,再由高位对接部202移动至电池充电区域210。例如,主控制设备2030可以控制上岸离岸装置105将船舶200的亏电的电池移动至船舶停靠位101,上岸离岸装置105为吊装机构,通过吊装机构将亏电的电池从船舶200移动至船舶停靠位101。位于船舶停靠位101上的亏电的电池,可以被添加至调度管理系统进行管理,使得亏电的电池可以从船舶停靠位101经由升降平台30自主移动至电池充电区域210。
114.在一些实施例中,充电装置211在对亏电的电池进行充电过程中,主控制设备2030
可以通过与充电装置211进行通信,来实现实时获取亏电的电池的电量。当主控制设备2030确定亏电的电池的电量大于预设电量时,主控制设备2030可以控制充电装置211停止对亏电的电池进行充电,提升电池充电安全性。
115.在一些实施例中,换电平台20上还设置有电池维保区域213,从船舶200卸下的亏电的电池还可以先经由浮台10及升降平台30自主移动至电池维保区域213进行检测,当检测到该亏电的电池不需要进行维修或者保养时,再从电池维保区域213自主移动至电池充电区域210进行充电。电池维保区域213包括可对亏电的电池进行状态检测的电池检测装置2130,及可对亏电的电池进行维修或者保养的电池维保装置2131。
116.在一些实施例中,换电平台20还设置有配电装置204及起火监测装置205。配电装置204用于为充电装置211提供电力。起火监测装置205可以设置在电池充电区域210,起火监测装置205可用于感测电池充电区域210是否存在起火的电池,当起火监测装置205感测到电池充电区域210存在起火的电池时,可以输出第三感测信号至主控制设备2030。配电装置204还可与主控制设备2030通信连接,当主控制设备2030接收到第三感测信号时,主控制设备2030可以控制配电装置204断开对充电装置211的供电,实现在监测到电池起火时,自动断电,提升电池充电安全。
117.在一些实施例中,电池充电区域210还设置有灭火装置212,灭火装置212与主控制设备2030电连接。当主控制设备2030接收到第三感测信号时,主控制设备2030可以开启灭火装置212,以对起火的电池进行灭火。例如,灭火装置212为喷淋装置,主控制设备2030可在接收到第三感测信号时,开启喷淋头喷水,以对起火的电池进行灭火。
118.在一些实施例中,换电平台20还设有温度传感器206及通风设备207。温度传感器206及通风设备207可以设置在电池充电区域210。温度传感器206用于感测电池充电区域210的环境温度,主控制设备2030可根据温度传感器206感测到的环境温度控制通风设备207的运行状态,以调节电池充电区域210的环境温度,提升电池的充电效率与充电安全性。通风设备207可以是风机、空调等设备,控制通风设备207的运行状态可以是指是否开启通风设备207,调整通风设备207的转速、温度等。
119.参照图13所示,为本技术另一实施例提供的一种船舶电池更换方法的流程示意图。该船舶电池更换方法可应用于换电工作站100,以实现对船舶200进行快速换电。换电工作站100包括浮台10、换电平台20及可在换电平台20与浮台10之间升降运行的升降平台30,浮台10设有船舶停靠位101,换电平台20上设置有可对亏电的电池进行放置与充电的电池充电区域210。本实施例中,船舶电池更换方法可以包括:
120.步骤s201、感测船舶停靠位101是否停靠有船舶200。
121.在一些实施例中,船舶停靠位101的边缘可以设置有接近传感器,可以通过接近传感器来实现感测船舶停靠位101是否停靠有船舶200。接近传感器可以与主控制设备2030通信连接,当接近传感器感测到船舶停靠位101停靠有船舶200,接近传感器可以输出第一感测信号至主控制设备2030。
122.步骤s202、当感测到船舶停靠位101停靠有船舶200时,确定船舶200是否卸下亏电的电池。
123.在一些实施例中,当通过接近传感器感测到船舶停靠位101停靠有船舶200时,主控制设备2030还可以通过判断是否接收到船舶200发送的第二感测信号,来确定船舶200是
否卸下亏电的电池。例如,船舶200可以与主控制设备2030建立通信连接,船舶200搭载的船舶系统可以感测电池是否被卸下,当船舶200的亏电的电池被卸下时,船舶200可以发送第二感测信号至主控制设备2030。当主控制设备2030接收到船舶200发送的第二感测信号时,确定船舶200卸下亏电的电池。
124.步骤s203、当船舶200的亏电的电池被卸下时,从电池充电区域210中随机选择一充满电的电池,并将选中的电池经由升降平台30及浮台10输送至船舶200。
125.在一些实施例中,当确定船舶200的亏电的电池被卸下时,表明停靠在船舶停靠位101的船舶200具有换电需求,主控制设备2030可以通过中控中心的人机交互界面输出船舶停靠位101需要充满电的电池进行换电的提示信息,进而可以安排工作人员从电池充电区域210中随机选择一充满电的电池输送至船舶200。
126.在一些实施例中,船舶停靠位101也可以设置有换电提醒装置(如声/光提醒装置),当确定船舶200的亏电的电池被卸下时,主控制设备2030可以控制换电提醒装置输出换电提示信息,以提示工作人员船舶200有换电需求,进而工作人员可以从电池充电区域210中随机选择一充满电的电池,并经由升降平台30将电池移动至浮台10,再将电池从浮台10移动至船舶200。电池可以设计为推车式电池包或者拖车式电池包,电池可以包括滚轮,从而使得电池可以在换电平台20和船舶200之间方便、快速的移动。
127.在一些实施例中,为了使得充满电的电池可以从电池充电区域210输送至船舶200,位于换电平台20的工作人员可以先将充满电的电池从电池充电区域210中移入至升降平台30的平台本体302,并启动升降平台30,位于浮台10的工作人员可以将充满电的电池从平台本体302移出并输送至船舶停靠位101,再将船舶停靠位101的充满电的电池移动至船舶200。
128.在一些实施例中,浮台10设置有上岸离岸装置105,上岸离岸装置105可以设置在船舶停靠位101。当充满电的电池移动至船舶停靠位101之后,工作人员可以操控上岸离岸装置105将船舶停靠位101的充满电的电池移动至船舶200。例如,上岸离岸装置105为吊装机构,工作人员可以操控吊装机构将充满电的电池从船舶停靠位101的移动至船舶200。
129.在一些实施例中,上岸离岸装置105还可以是可搭接于船舶停靠位101的边缘与船舶200之间的可折叠搭板,以供电池在船舶停靠位101的边缘和船舶200之间作离岸或上岸行驶。当可折叠搭板搭接在船舶停靠位101的边缘和船舶200之间时,工作人员还可以将充满电的电池经由可折叠搭板从船舶停靠位101移动至船舶200。
130.步骤s204、将从船舶200卸下的亏电的电池经由浮台10及升降平台30移动至电池充电区域210。
131.在一些实施例中,电池充电区域210设置有一个或多个充电装置211,当船舶200的亏电的电池被卸下时,可以将亏电的电池经由浮台10及升降平台30移动至电池充电区域210,以对亏电的电池进行充电。为了使得亏电的电池从船舶200移动至电池充电区域210,位于浮台10的工作人员可以先将亏电的电池从船舶200移动至船舶停靠位101,再将船舶停靠位101的亏电的电池移动移入至升降平台30的平台本体302,并启动升降平台30,位于换电平台20的工作人员可以将亏电的电池从平台本体302移出并输送至电池充电区域210。工作人员可以操控上岸离岸装置105将船舶停靠位101的充满电的电池移动至船舶200。例如,上岸离岸装置105为吊装机构,工作人员可以操控吊装机构将亏电的电池从船舶移动至船
舶停靠位101。上岸离岸装置105为可搭接于船舶停靠位101的边缘与船舶200之间的可折叠搭板。当可折叠搭板搭接在船舶停靠位101的边缘和船舶200之间时,工作人员还可以将亏电的电池经由可折叠搭板从船舶200移动至船舶停靠位101。
132.在一些实施例中,充电装置211在对亏电的电池进行充电过程中,主控制设备2030可以通过与充电装置211进行通信,来实现实时获取亏电的电池的电量。当主控制设备2030确定亏电的电池的电量大于预设电量时,主控制设备2030可以控制充电装置211停止对亏电的电池进行充电,提升电池充电安全性。
133.在一些实施例中,换电平台20上还设置有电池维保区域213,从船舶200卸下的亏电的电池还可以由工作人员移动至电池维保区域213进行检测,当检测到该亏电的电池不需要进行维修或者保养时,工作人员将亏电的电池从电池维保区域213移动至电池充电区域210进行充电。电池维保区域213包括可对亏电的电池进行状态检测的电池检测装置2130,及可对亏电的电池进行维修或者保养的电池维保装置2131。工作人员可以使用电池检测装置2130对亏电的电池进行状态检测,电池检测装置2130可以输出检测结果,检测结果可以包括电池是否出现故障、故障类型、维保建议中的至少一者。当通过电池检测装置2130确定亏电的电池需要进行维修或者保养时,换电站工作人员可以根据电池检测装置2130的检测结果,利用电池维保装置2131对亏电的电池进行维修或者保养。
134.在一些实施例中,换电平台20还设置有配电装置204及起火监测装置205。配电装置204用于为充电装置211提供电力。起火监测装置205可以设置在电池充电区域210,起火监测装置205可用于感测电池充电区域210是否存在起火的电池,当起火监测装置205感测到电池充电区域210存在起火的电池时,可以输出第三感测信号至主控制设备2030。配电装置204还可与主控制设备2030通信连接,当主控制设备2030接收到第三感测信号时,主控制设备2030可以控制配电装置204断开对充电装置211的供电,实现在监测到电池起火时,自动断电,提升电池充电安全。
135.在一些实施例中,电池充电区域210还设置有灭火装置212,灭火装置212与主控制设备2030电连接。当主控制设备2030接收到第三感测信号时,主控制设备2030可以开启灭火装置212,以对起火的电池进行灭火。例如,灭火装置212为喷淋装置,主控制设备2030可在接收到第三感测信号时,开启喷淋头喷水,以对起火的电池进行灭火。
136.在一些实施例中,换电平台20还设有温度传感器206及通风设备207。温度传感器206及通风设备207可以设置在电池充电区域210。温度传感器206用于感测电池充电区域210的环境温度,主控制设备2030可根据温度传感器206感测到的环境温度控制通风设备207的运行状态,以调节电池充电区域210的环境温度,提升电池的充电效率与充电安全性。通风设备207可以是风机、空调等设备,控制通风设备207的运行状态可以是指是否开启通风设备207,调整通风设备207的转速、温度等。在其他实施例中,通风设备207也可以由工作人员手动开启或者关闭,并可由工作人员手动设置通风设备207的运行参数。
137.参考图14,为本技术实施例提供的主控制设备2030的硬件结构示意图。如图14所示,主控制设备2030可以包括处理器2032、存储器2033、输入输出设备2034、通信模块2035及通信总线2036。存储器2033用于存储一个或多个计算机程序2037。一个或多个第一计算机程序2037被配置为被处理器2032执行。该一个或多个计算机程序2037包括指令,上述指令可以用于实现在主控制设备2030中执行如图12所述的船舶电池更换方法。
138.可以理解的是,本实施例示意的结构并不构成对主控制设备2030的具体限定。在另一些实施例中,主控制设备2030可以包括比图示更多或更少的部件,或者组合某些部件,或者拆分某些部件,或者不同的部件布置。主控制设备2030可以是计算机、服务器等设备。
139.处理器2032可以包括一个或多个处理单元,例如:处理器2032可以包括应用处理器(application processor,ap),调制解调器,图形处理器(graphics processing unit,gpu),图像信号处理器(image signal processor,isp),控制器,视频编解码器,数字信号处理器(digital signal processor,dsp),基带处理器,和/或神经网络处理器(neural-network processing unit,npu)等。其中,不同的处理单元可以是独立的器件,也可以集成在一个或多个处理器中。
140.处理器2032中还可以设置有存储器,用于存储指令和数据。在一些实施例中,处理器2032中的存储器为高速缓冲存储器。该存储器可以保存处理器2032刚用过或循环使用的指令或数据。如果处理器2032需要再次使用该指令或数据,可从该存储器中直接调用。避免了重复存取,减少了处理器2032的等待时间,因而提高了系统的效率。
141.在一些实施例中,处理器2032可以包括一个或多个接口。接口可以包括集成电路(inter-integrated circuit,i2c)接口,集成电路内置音频(inter-integrated circuit sound,i2s)接口,脉冲编码调制(pulse code modulation,pcm)接口,通用异步收发传输器(universal asynchronous receiver/transmitter,uart)接口,移动产业处理器接口(mobile industry processor interface,mipi),通用输入输出(general-purpose input/output,gpio)接口,sim接口,和/或usb接口等。
142.在一些实施例中,存储器2033可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
143.在一些实施例中,输入输出设备2034可以包括键盘、鼠标、触控面板、显示器、影像输出系统、语音输出系统等。通信模块2035可以包括无线通信模块和有线通信模块。例如,主控制设备2030可以通过通信模块2033与接近感应装置106、中控显示屏2031、配电装置204、起火监测装置205、温度传感器206、通风控制设备208、充电装置211、灭火装置212、驱动控制设备304等进行通信。
144.在本技术所提供的几个实施例中,应该理解到,所揭露的设备和方法,可以通过其它的方式实现。例如,该模块或单元的划分,为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个装置,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
145.该作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是一个物理单元或多个物理单元,即可以位于一个地方,或者也可以分布到多个不同地方。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
146.另外,在本技术各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单
元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
147.该集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个可读取存储介质中。基于这样的理解,本技术实施例的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该软件产品存储在一个存储介质中,包括若干指令用以使得一个设备(可以是单片机,芯片等)或处理器(processor)执行本技术各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
148.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何在本技术揭露的技术范围内的变化或替换,都应涵盖在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1