配备有对制动器盘与衬垫之间的间隙进行动态调节的盘式制动器和相关的方法与流程
本发明涉及线控制动式(bbw)盘式制动系统,该盘式制动系统配备有对制动器盘与衬垫之间的距离进行动态调节。此外,本发明涉及用于对bbw型制动系统中的制动器盘与衬垫之间的距离进行调节的方法。
背景技术:
1、在液压式盘式制动器卡钳上,制动器盘与衬垫之间的距离是在设计阶段限定的并且不能主动改变。当制动控制被释放并且因此制动系统内的液压压力被释放时,卡钳活塞仅通过密封件的弹性变形而被动地退回或缩回。活塞密封件和该活塞密封件的坐置部可以被设计成使得密封件承受更大的变形并且因此使得在释放时实现更大的力和活塞的返回行程(回滚)。然而这导致使具有低制动流体传输/位移的制动要求和踏板上更佳的制动感觉(即,减少所述踏板的致动行程)恶化。在已知的解决方案中的任何情况下,在车辆处于使用中时,活塞的位置都不可以被随意改变。
2、在没有液压流体并且因此配备有机电卡钳的bbw型制动系统中,可以经由软件随时对制动器盘与衬垫之间的距离进行控制和改变,但制动器盘与衬垫之间的距离的值不能随意选择,这是因为制动器盘与衬垫之间的距离是以下不同需求之间折衷的结果:
3、-大或高的间隙减少制动器盘上的残余制动扭矩和相关的衬垫磨损,但是显著增加响应时间,这是因为大或高的间隙在使用者对制动作用的请求与制动作用的实际启动之间引入了不可忽略的延迟;
4、-小或减小的距离通过减少产生制动扭矩中的延迟而增加了制动准备度,但同时,小或减小的距离增加了在没有制动命令的情况下的残余制动扭矩、衬垫磨损,以及增加了车辆燃料消耗,从而导致车辆可行驶里程减少(特别是在电动车辆的情况下)。小或减小的距离还增加了车辆在能源消耗以及由于衬垫磨损导致的灰尘和颗粒物排放的方面的总污染。
5、因此,制动器盘与衬垫之间的距离是一方面实现有效的制动作用与另一方面实现尽可能低的残余扭矩的折衷。
6、由于现有技术的解决方案不允许制动器盘与衬垫之间的距离的动态变化、即实时变化,因此现有技术的解决方案不允许在车辆使用的所有动态条件下优化制动作用并减少残余扭矩。
技术实现思路
1、因此,在本领域中感到需要提供一种允许解决参考现有技术提及的技术缺陷的制动系统。
2、该需求是通过根据权利要求1的制动系统和根据权利要求19的用于对制动器盘与衬垫之间的间隙进行调节的方法来满足的。
3、特别地,该需求是通过用于车辆的制动系统满足的,该制动系统包括:
4、至少一个盘式制动器,该盘式制动器包括制动器盘,该盘式制动器具有盘式制动器卡钳,该盘式制动器卡钳被布置成跨置于制动器盘上,以及至少一对衬垫是彼此相对的并且从相反两侧沿致动轴向方向作用在所述制动器盘上,该致动轴向方向平行于制动器盘的旋转轴线,
5、至少一个电动致动器,该电动致动器操作性地连接至活塞,该活塞作为推动器沿所述致动方向作用在所述衬垫中的至少一个衬垫上,
6、处理及控制单元,该处理及控制单元操作性地连接至所述电动致动器并且被编程为使得:在制动请求期间,使活塞和相应的衬垫沿轴向方向移动到前部位置中,以将衬垫按压成与制动器盘接触;以及使活塞进入静置或后部位置中,在所述静置或后部位置中,衬垫与制动器盘之间确定有间隙,其中,处理及控制单元被编程为实现下述算法:在没有制动作用请求的情况下,该算法通过根据车辆的对未来制动作用请求的预测进行限定的至少一个动态参数来改变所述间隙而使电动致动器进行操作,以在制动作用请求即将发生时增大间隙,以及在制动作用请求并非即将发生时减小间隙。
7、根据实施方式,所述盘式制动器卡钳在所述衬垫处包括诸如弹性件或十字形件(spider)的推力装置,该弹性件或十字形件施加使衬垫与制动器盘在轴向上间隔开的弹性作用,以在没有制动作用请求的情况下使衬垫朝向相应的活塞缩回。
8、根据实施方式,衬垫被约束至相应的活塞,使得该衬垫与该相应的活塞一体地沿致动轴向方向平移。
9、根据实施方式,所述算法判定以最大值或高值来建立间隙还是以低值来建立间隙,该最大值或高值对应于所限定的低残余扭矩和高响应时间,该低值对应于高残余扭矩和低响应时间。
10、根据实施方式,车辆的所述动态参数包括碰撞时间,该碰撞时间被估算为配备有所述制动系统的车辆与位于配备有所述制动系统的车辆之前的另外的车辆之间在没有改变所述车辆的相应的速度和轨迹的情况下发生碰撞所需的时间。如果所估算的碰撞时间减小,则间隙也被减小,以及如果所估算的碰撞时间增大,则间隙也被增大。
11、根据实施方式,所述碰撞时间是根据配备有所述制动系统的车辆所行驶的道路表面的摩擦系数来估算的。如果摩擦系数减小,则间隙也被减小,以及如果摩擦系数增大,则间隙也被增大。
12、根据实施方式,所述碰撞时间是根据配备有所述制动系统的车辆与位于配备有所述制动系统的车辆之前的另外的车辆之间的加速度差异来估算的。如果加速度差异会导致可能需要制动或可能发生碰撞,则减小间隙,并且如果加速度差异不会导致可能需要制动或可能发生碰撞,则增大间隙。
13、根据实施方式,车辆的所述动态参数包括危险指数,该危险指数即为对两个车辆之间的碰撞风险进行限定的无量纲指数,该危险指数被限定为临界制动距离与临界危险距离之间的关系,使得如果临界制动距离小于临界危险距离,则减小间隙,并且如果临界制动距离大于临界危险距离,则增大间隙。
14、根据实施方式,车辆的所述动态参数包括配备有所述制动系统的车辆与位于配备有所述制动系统的车辆之前的另外的车辆之间的预定的安全距离。明显的,如果所述安全距离减小,则间隙也被减小,以及如果所述安全距离增大,则间隙也被增大。
15、根据实施方式,配备有所述制动系统的车辆的所述动态参数包括危险信号,该危险信号来自位于配备有所述制动系统的车辆之前的车辆,位于该车辆之后的配备有所述制动系统的车辆与该危险信号连接。
16、根据实施方式,所述动态参数包括与沿车辆的路线的实时交通状况有关的信息。
17、根据实施方式,配备有所述制动系统的车辆的所述动态参数包括与车辆的路线的实时状况有关的信息,比如速度限制和/或道路的倾斜度和/或弯道。
18、根据实施方式,车辆的所述动态参数包括车辆的乘客的舒适度请求,以在需要更多舒适度的情况下增大间隙,以及在需要更少舒适度的情况下减小间隙。
19、根据实施方式,通过电动致动器实现的所述间隙变化是离散类型的。
20、根据实施方式,该算法确定出最小碰撞时间和最大碰撞时间。如果碰撞时间的值被保持在这个范围内,则间隙被保持在该间隙的当前状态中,如果碰撞时间超过由所述最小碰撞时间和所述最大碰撞时间限定的所述阈值,则改变间隙。明显地,特别地,低碰撞时间意味着短期内可以需要制动,而高碰撞时间意味着短期内不太可能需要制动。如果碰撞时间超过所述最大值,则以间隙的上限值建立间隙,这对应于低残余扭矩和较高的响应时间;相反地,如果碰撞时间变得小于所述最小值,则以间隙的下限值建立间隙,这对应于较高的残余扭矩和较低的响应时间。
21、根据实施方式,碰撞时间的最小值为4.5秒,并且碰撞时间的最大值为5秒。
22、根据实施方式,间隙通过电动致动器实现的所述变化是连续类型的,以根据车辆的所述动态参数使所述间隙在最小值与最大值之间进行改变。
23、本发明还涵盖包括如前所述的制动系统的车辆。
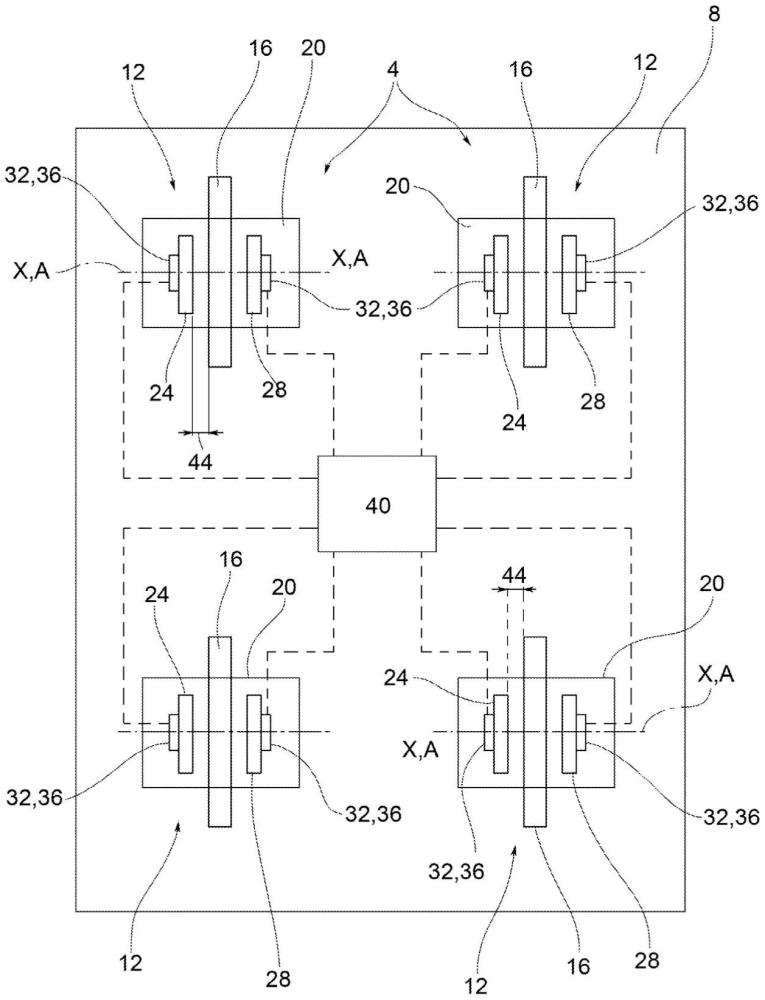
24、本发明还涉及用于对制动系统进行控制的方法,该方法包括建立用于车辆(8)的制动系统(4)的步骤,该制动系统(4)包括:
25、至少一个盘式制动器,该盘式制动器包括制动器盘,该盘式制动器具有盘式制动器卡钳,该盘式制动器卡钳被布置成跨置于制动器盘上,以及至少一对衬垫是彼此相对的并且从彼此相反的两侧沿致动轴向方向作用在所述制动器盘上,该致动轴向方向平行于制动器盘的旋转轴线;至少一个电动致动器,该电动致动器操作性地连接至活塞,该活塞作为推动器沿所述致动方向作用在所述衬垫中的至少一个衬垫上,
26、处理及控制单元,该处理及控制单元操作性地连接至所述电动致动器并且被编程为使得:在制动请求期间,使活塞和相应的衬垫沿轴向方向移动至前部位置,以将衬垫按压成与制动器盘接触;以及使活塞和相应的衬垫进入静置或后部位置,在所述静置或后部位置中,衬垫与制动器盘之间确定有间隙,
27、其中,处理及控制单元被编程为实现下述算法:在没有制动作用请求的情况下,该算法通过根据车辆的对未来制动作用请求的预测进行限定的至少一个动态参数来改变所述间隙而使电动致动器进行操作,以在制动作用即将发生时增大间隙,以及在制动作用并非即将发生时减小间隙。
- 还没有人留言评论。精彩留言会获得点赞!