确定车辆制动片的磨损状态的方法及设备和计算机程序与流程
本发明涉及一种用于确定并且特别是连续观察车辆制动片的磨损状态的方法,以及用于此的一种设备和一种计算机程序。
背景技术:
1、在车辆(例如在客车领域或商用车领域)中使用的液压制动系统被设计为利用通过摩擦产生的扭矩来使车轮减速。制动卡钳通常使制动片与旋转的转子、特别是固定地与车轮连接的制动盘相反地运动。由此在制动片和制动盘之间建立摩擦类型的表面接触。导热的制动片被设计为承受磨损,以保证制动系统持久耐用。对车辆安全性的要求、错误避免、制动卡钳-转子系统的使用寿命最大化、车辆监视和维护以及车队和供应链管理都需要对制动片磨损进行监视。
2、制动片的磨损识别基本上基于直接识别方案和间接识别方案的组合:可以直接使用硬件传感器测量或监视制动片材料的厚度(直接扫描)。间接测量方法从预先设定的系统参数和环境传感器的数据中导出制动片厚度或制动片的磨损状态。
3、常见的制动片磨损传感器bpws包括垂直于制动片磨损方向嵌入制动片摩擦材料中的电路。这些传感器通常安装在制动片的背板上或紧邻制动片的背板。bpws可以具有多个级别,以用于对制动片的磨损状态进行分类,这些级别是在电路由于制动片磨损而遭到破坏时由逐级的电阻变化得出的。因此,这些传感器在制动片磨损的过程中遭到破坏(破坏性扫描)。
4、无破坏扫描的方案包括使用其他方法直接或间接测量制动片厚度的传感器系统。例如基于超声技术的位置传感器或距离测量。
5、传感器信号的评估可以与更复杂的软件算法相组合。当前的算法通常涉及制动盘的表面温度,所述表面温度由附加的硬件传感器或依赖于其他传感器的测量值和由制动系统提供的变量的软件算法确定。制动盘温度模型btm用于从相对制动盘冷却以及由制动片施加的物理功中导出制动盘温度。btm的主要参数是接触压力、车轮速度和环境温度,不考虑涉及车轮特性、制动片特性和制动系统特性的系数。
6、制动片磨损δwz是从物理建模中导出的。在第一近似中,δwz线性依赖于制动事件期间耗散的能量eb,即每次制动δwz∝eb。该模型的比例常数k本身通常取决于压力、车轮转速和制动盘温度(由btm给出),并且通常用多项式来加以近似。当前时间点t0时制动片的总磨损是通过将所有先前执行的制动事件的δwz估计相加而导出的(积分方案)。多级bpws既用于具有较强不确定性的模型预测的逐级重新校准,也在制动片完全磨损时用作安全单元(驾驶员警告)。
7、然而,计算制动片总制动片磨损的积分方案是基于用相同类型(品牌、型号)的新制动片更换制动片的假设。使用其他类型的已经磨损的制动片需要对已安装的模型进行初始的重新校准,这无法处理当前的实施。其次,将模型预测或未建模的制动片行为中的系统不确定性集成,这连续提高了在通过bpws测量的模型重新校准之前的测量不确定性。此外,当前的btm实施在估计的制动盘温度方面具有很高的不确定性(≤100k)。因此,btm实施仅满足asil-a标准(automotive safety integration level,汽车安全集成级别)。通过制动盘温度的硬件传感器来替代btm反而会导致产品成本大幅增加。安装到制动片的制动片材料中的内部bpws最终会随着制动片的磨损而被消耗。因此,更换制动片需要更换传感器,这增加了累加的维护成本。
技术实现思路
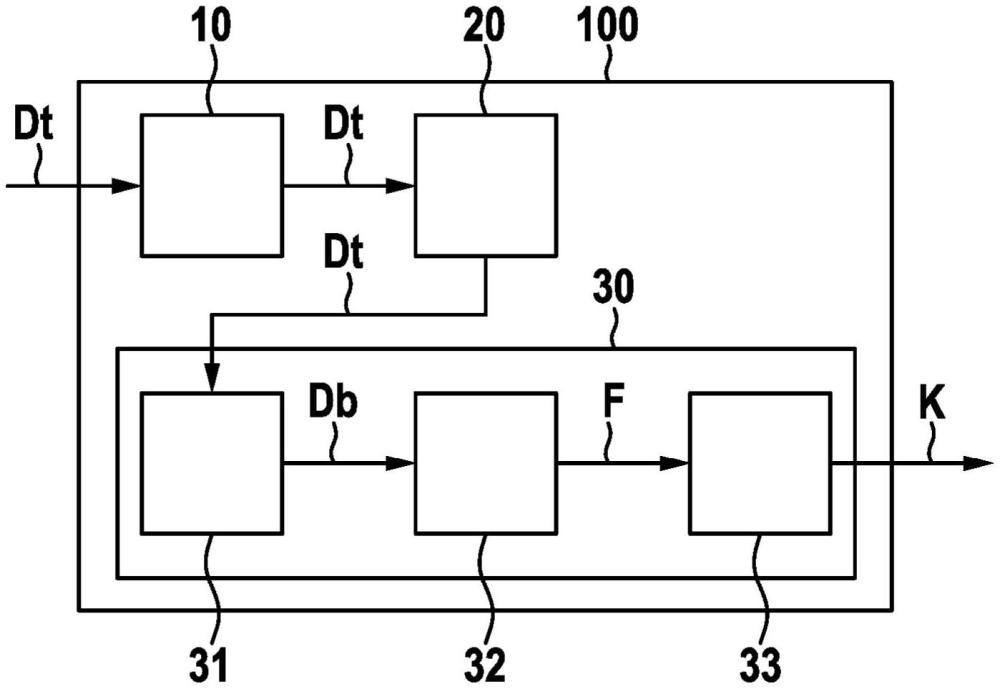
1、根据本发明的一个方面,用于确定车辆的制动片的磨损状态的方法包括以下步骤。在一个步骤中,接收时间序列数据,其中所述时间序列数据包括所述车辆的制动系统相关数据的时间序列。在进一步的步骤中,在所述时间序列数据中标识至少一个制动事件,其中在所述时间序列数据中标识的每个制动事件对应于所述时间序列数据的制动事件数据的时间数据窗口,其中所述数据窗口与所述车辆的真实制动事件相关。在进一步的步骤中,对于每个标识的制动事件使用预定的算子从所述制动事件数据中确定特征。在进一步的步骤中,使用为此确定的特征来对所述至少一个制动事件进行分类,其中将所述分类分配给所述车辆的制动片的磨损状态。
2、这里使用的术语“制动片的磨损状态”特别是包括制动片的厚度。
3、因此,时间序列数据包括源在多个时间步骤期间的大量数据集。
4、换句话说,所确定的特征描述了在制动事件期间所述车辆的系统行为,特别是制动系统的系统行为。基于所确定的特征,可以对所分析的制动事件进行分类,或者换句话说,可以对制动事件的质量做出判断。通过假设制动事件的质量与制动片的磨损状态直接相关,基于制动事件的分类来对制动盘的磨损状态做出判断。
5、优选地,对至少一个制动事件进行分类包括使用为此确定的特征通过特别是预先训练的机器学习模型来对所述至少一个制动事件进行分类,其中所述机器学习模型为每个分类的至少一个制动事件确定概率,并且使用所确定的概率向所述至少一个制动事件分配类别。
6、优选地,在初始的磨合阶段期间(例如在最初的10000公里期间)自动训练所述机器学习模型。进一步优选地,在更换制动片之后,例如在更换制动片之后的最初的10000公里期间,自动训练所述机器学习模型。
7、所述机器学习模型的机器学习算法可以使用诸如逻辑回归、神经网络、随机森林等方法。在车辆的激活的制动片状态监视系统中实施的模型可以在交付车辆系统之前进行预训练,或者可以在车辆的磨合阶段期间进行自学习。
8、时间序列数据,即输入数据,由时间序列sk(t)表示,该时间序列具有各自不同的扫描。下标k∈n表示第k个信号源或数据源。变量t表示时间。所述时间序列数据的所有数据类型均由制动系统相关硬件或控制软件提供,包括例如惯性测量单元的按照标准的车辆状态或环境数据源。
9、优选地,制动事件具有小于10秒的长度,更优选地小于5秒。
10、时间序列数据的特征在于为每个数据窗口内的所有时间序列数据导出的统计特征。为了确定特征而考虑的统计估计器或数学算子包括例如分位数、标准偏差、平均值、最小值和/或最大值。
11、对于每个制动事件,即数据窗口,将特征,或者特别是优化的特征集提供给已经针对事件分类进行预训练的机器学习模型。所述机器学习模型优选使用监督逻辑回归分类器,这是用于分类问题的标准方法。由于经过训练的逻辑回归模型的数值和计算复杂性较低,因此可以通过这种方式使得在控制设备上的嵌入式实施更为容易。分类算法的替代版本可以使用其他监督机器学习分类器,例如随机森林,既具有车辆内部的实施又具有外部(例如基于云的)的实施。为了避免分类器的一般预训练,即制动事件的分类,或特定于车辆的训练,可以使用无监督机器学习模型。
12、更优选地,所述机器学习模型使用逻辑回归。逻辑回归是一种用于分类的线性概率判别模型。判别意味着该模型学习一种映射函数,所述映射函数通常称为判别函数并且将输入数据映射为一个类别。概率意味着所述判别函数是基于统计分布的输入数据及其相应的类别来学习的。
13、事件分类,即将制动片磨损状态类别正式分配给给出的制动事件,是基于概率方案。在基本方案中,将单个事件分类为具有最高概率的类别。在两个磨损状态类别的示例性情况下,c∈{好,坏},分类阈值由概率值0.5给出。可以类似地处理多个类别,例如通过将逻辑回归一般化为多于两个磨损状态类别。
14、因此,所提出的方案使得能够基于各个独立的制动事件(由来自车辆和制动系统传感器的时间序列数据或数据和状态表示)对制动片的制动片厚度进行分类,因此也使得能够测量制动片的制动片厚度。因此与现有技术中讨论的积分方案相比,这里选择了差分方案来估计制动片的磨损状态。因此,无需在较长时间段内积分地观察制动片的磨损状态。
15、通过考虑各个制动事件和各个分配的时间序列数据的特征生成,考虑制动系统和车辆的整体行为,在此基础上估计制动片的磨损。
16、通过这种方式提供了一种更加准确的用于确定制动片的磨损状态的方法。与积分方法相比,不确定性显著降低。此外,由此还可以使用和监视其他制造商的替代制动片(例如在更换制动片时)。
17、通过纯基于模型的方案或至少主要基于模型的方案,制动片上不需要额外的直接传感器,这些传感器例如直接测量制动片的厚度并且通常相对费事且成本密集。
18、通过这种方式,提供了一种改进的用于确定制动片的磨损状态的方法。
19、根据优选实施方式,制动相关数据包括车辆的传感器数据、控制设备数据和/或制动系统数据。
20、时间序列数据优选地包括随时间变化的大量制动相关数据,特别是原始数据。
21、根据优选实施方式,传感器数据由主制动缸压力传感器、轮胎转速传感器、车辆惯性传感器和/或制动系统传感器提供。
22、优选地,传感器数据包括时间相关的物理变量的测量。进一步优选地,由车辆的传感器执行测量以确定具有预定频率的传感器测量。换句话说,执行信号扫描,也称为采样。
23、优选地,制动系统传感器包括用于确定由制动系统移位的制动流体体积的传感器。
24、优选地,控制数据包括从传感器数据中产生的数据。
25、优选地,控制设备数据检测从传感器数据、系统数据或软件数据中导出的各种变量,特别是物理变量。这些数据作为时间的函数提供,特别是采样的函数。
26、根据优选实施方式,制动系统数据包括制动系统状态和/或制动系统标志。
27、优选地,制动系统数据包括作为时间的函数的制动系统条件、制动系统设置以及制动系统的功能激活或工作模式。
28、根据一种优选实施方式,标识至少一个制动事件包括以下步骤。接收至少一个制动触发器,其中所述制动触发器与所述车辆的真实制动事件相关,以及使用接收到的至少一个制动触发器来标识所述至少一个制动事件。
29、优选地,标识至少一个制动事件包括选择存储在例如存储器中的时间序列数据,其中将所选择的时间序列数据分配给制动事件。
30、优选地,制动触发器是从外部接收的。
31、原则上,基于制动事件来评估制动片的磨损状态。因此,将时间序列数据划分为时间间隔,所述时间间隔也称为数据窗口。将这些时间间隔的长度选择为使得它们完全覆盖各个孤立的制动事件,从而为制动事件分析提供明确的数据集。
32、例如,制动触发器包括制动灯开关信号的状态,即说明制动灯是否被激活的信号,速度信号,即说明车辆以什么速度运动的信号,和/或发动机状态信号,即说明发动机处于什么状态的信号。
33、优选地,当制动灯开关信号说明“激活”,速度信号超过预定值(例如0.1m/s)并且发动机状态信号说明“激活”时,确定制动事件的开始。
34、由于每个制动事件的制动持续时间是变化的,因此重要的是选择制动事件中提供用于分类的重要信息的部分。例如,设定应用于所有制动事件并在机器学习模型的训练期间优化的固定窗口大小。时间窗口通过元组(ts,δtw)来表征,其中ts是窗口的相对起始时间,δtw是窗口长度。时间序列数据在间隔[ts,ts+δtw]之外的所有数据点都被去掉。分析时不考虑不满足给出的窗口的最低要求的制动事件(例如短事件)。替代地,可以定义不同的时间窗口,使用事件归一化方法对这些时间窗口进行数学处理。
35、替代地,制动事件包括缓冲时间。换句话说,制动事件包括实际制动事件之前和之后的时间序列数据。因此将在制动触发器之前和/或之后具有预先设定的缓冲时间的时间序列数据分配给相应的制动事件。
36、根据优选实施方式,至少一个制动触发器包括制动灯开关的状态、车辆的速度和/或发动机状态。
37、根据优选实施方式,丢弃不能分配给制动事件的多余的时间序列数据。
38、换句话说,丢弃仅包含在两个连续制动事件之间的间隙内记录的数据的时间序列数据的间隔。
39、根据优选实施方式,丢弃不适合于确定特征的时间序列数据。
40、并非所有制动事件都适合分析关于制动片磨损的数据。特别是被分类为无效的时间序列数据不适合于确定特征。例如,将时间序列数据的不完整或不正确的数据分类为无效。另外,数据选择可以基于信号参数的标准来进行,例如车辆运动的参数、制动强度和长度等等。此外,在敏感性、系统性或模型内部限制方面对分类的限制,即特别是分类算法的限制,可能导致各个数据分组被排除在数据分析之外。
41、因此,事件选择在数据选择时施加了限制。
42、根据优选实施方式,该方法包括向每个所确定的特征分配相关性并使用预先设定数量的具有最高相关性的特征来对至少一个制动事件进行分类。
43、在机器学习模型的训练期间,首先考虑大量特征,并且迭代地根据相关性(即根据对由分类器导出的分类概率的影响)进行排序。例如,总共对15个最相关的特征进行分类算法,即根据递归特征消除方法进行特征选择和特征优化。另外的优化标准是对不相关时间序列的偏好,由此得出的统计相关性的上限和时间序列方差的下限的设定,以避免近似恒定的信号。作为模型优化的结果,替代算法可能会考虑更少或更多的特征。
44、根据优选实施方式,接收时间序列数据包括以下步骤。将接收到的时间序列数据存储在存储器中,其中只要存储器没有耗尽或者只要对应的时间序列数据的特征尚未被确定,就将时间序列数据保留在所述存储器中。
45、根据优选实施方式,通过考虑车辆的制动历史来对至少一个制动事件进行分类。
46、优选地,所述制动历史包括采取和包括连续磨损过程的假定。进一步优选地,所述制动历史包括多个连续制动事件的特征。更优选地,所述制动历史包括在先前的制动事件中已识别出的潜在制动异常。
47、根据优选实施方式,该方法包括接收温度数据,其中所述温度数据包括制动片的温度、车辆的制动盘的温度(特别是制动片所固定在的制动盘的温度)和/或车辆的环境温度,并且使用为此确定的特征和对应的温度数据对至少一个制动事件进行分类。
48、优选地,制动片的温度数据包括在制动片的背向制动盘的一侧上所述制动片的温度。基于背向制动盘的一侧上的温度,可以推断出制动片的导热性,因此尤其是推断出制动片的厚度。
49、优选地,温度数据还包括车辆的环境温度,更优选地包括制动盘的环境温度。
50、为了温度数据的准确性,应在车辆环境温度的背景下考虑加热过程和冷却过程。
51、优选地,温度数据具有与特征相比特别高的重要性,即与制动片的状态的相关性。
52、与所确定的特征一起,可以通过机器学习模型借助于温度数据进行特别准确的分类。
53、根据本发明的另一方面,提出了一种设备,所述设备被设置为执行如这里描述的用于确定制动片的磨损状态的方法。
54、根据本发明的另一方面,提出了一种计算机程序,包括指令,当该计算机程序由计算机执行时,所述指令促使所述计算机执行这里描述的方法。
- 还没有人留言评论。精彩留言会获得点赞!