本发明涉及一种用于调整车辆的制动踏板特性的方法。此外,本发明涉及一种装置、一种车辆、一种计算机程序产品和一种存储介质。
背景技术:
1、优选地,在本技术中,驾驶员的输入或来自驾驶员的输入或由驾驶员进行的输入描述了驾驶员的动作,其中,驾驶员向车辆或车辆的系统输入输入值,以相应地影响车辆或系统。输入值可以由踏板、特别是制动踏板或加速踏板生成。
2、优选地,驾驶员的输入是踏板位置。在下面,假设驾驶员的输入由踏板生成。此外,表达“踏板”可以被理解为配置成能够由驾驶员的脚踩下的经典踏板。但是也可以使用除了经典踏板之外的装置,例如手动操作的装置,例如操作杆。驾驶员的输入可以是位置、压力或被测量以获知相应踏板的状态的任何其它物理值。
3、优选地,在本技术中,制动单元包括根据由驾驶员的输入、特别是由制动踏板主动生成的制动踏板减速需求而被激活的至少一个制动器。特别地,制动单元可以包括或用作车辆的行车制动器。相比之下,减速装置被配置成能够根据减速需求使车辆减速,其中,减速需求可以由制动踏板生成,但是也可以由至少一个另外的减速需求生成装置,例如由加速踏板生成。特别地,减速装置可以包括缓速器、制动器(特别是与制动单元的制动器相关的制动器)、涡流制动器和/或具有电机的电动力传动系。本技术中提到的车辆优选地包括制动单元和减速装置两者。
4、缓速器用于辅助通常是制动单元的一部分的行车制动器并提高车辆的整体制动性能。通常,在传统的内燃机动力传动系中,缓速器例如通过将车辆动能转化为热量来耗散车辆动能。
5、此外,在电动力传动系车辆的情况下,回收式缓速器可以在使车辆减速的同时重新捕获能量并将能量存储在电存储器中以供以后使用。这是通过将电动力传动系、相应地电机作为发电机操作来实现的。所生成的能量可以存储在车辆的电能存储单元中(再生制动)。
6、此外,制动器、特别是稍后描述的机械制动器和/或涡流制动器也可以是减速装置和/或制动单元的一部分。
7、这些减速装置和制动单元可以根据不同的操作模式以不同的方式操作,其中,可以实现不同级别的减速,相应地实现不同级别的制动力。一种生成用于回收式或耗散式缓速的减速需求信号的特定方法是单踏板驾驶模式(opd模式:one-pedal-drive mode)。这是一个驾驶员舒适功能,其允许驾驶员使用单个踏板控制加速和制动。在这种模式下,例如,当加速踏板被驾驶员释放或至少被较少地致动时,由加速踏板生成的输出信号被解释为减速需求,根据系统配置,车辆将通过减速装置生成相应的制动力。
8、响应于来自opd模式的命令可以实现的减速或制动的量并不总是恒定的。例如,对于在电动力传动系中包括回收式缓速器的减速装置,实现的实际减速取决于例如能量存储单元的荷电状态(soc)或例如电池、电动机或功率电子器件等动力传动系部件的温度等因素。
9、在包括耗散缓速器的减速装置的情况下,可以实现的减速或制动的量受到例如车辆速度或缓速器机制的响应时间等因素的限制。
10、优选地,在本技术中,减速需求描述了用于制动单元和/或用于减速装置和/或总体上用于车辆的目标值。这意味着,响应于供应到制动单元和/或减速装置的减速需求,制动单元和/或减速装置对车辆施加减速效果,以实现车辆的对应于目标减速的减速。特别地,目标减速可以由不同的源生成。例如,制动踏板生成制动踏板减速需求,并且至少一个另外的减速需求生成装置生成另外的减速需求。因此,车辆可以被配置成能够选择这些减速需求中的一个或者将它们相加,特别是将它们与主减速需求相加。
11、当使用车辆根据至少一个另外的减速需求减速的驾驶模式时,特别是在opd期间,必须协调由作为至少一个另外的减速需求生成装置的加速踏板引起的减速与由制动踏板引起的减速之间的过渡,以避免当驾驶员切换到制动踏板时减速需求的生成中断。
12、然而,在许多情况下,由于大多数车辆具有用于牵引力控制和制动系统控制的单独控制器的事实,在opd模式下加速踏板所要求的减速和制动踏板所要求的减速是“不协调的”。在其它一些情况下,制动踏板特性曲线最初使用opd可以要求的最大可能缓速进行调整,这被认为是“部分协调”。然而,由于前面所述的限制,不能保证在从opd转换到制动踏板致动的时刻已经实现了最大减速。
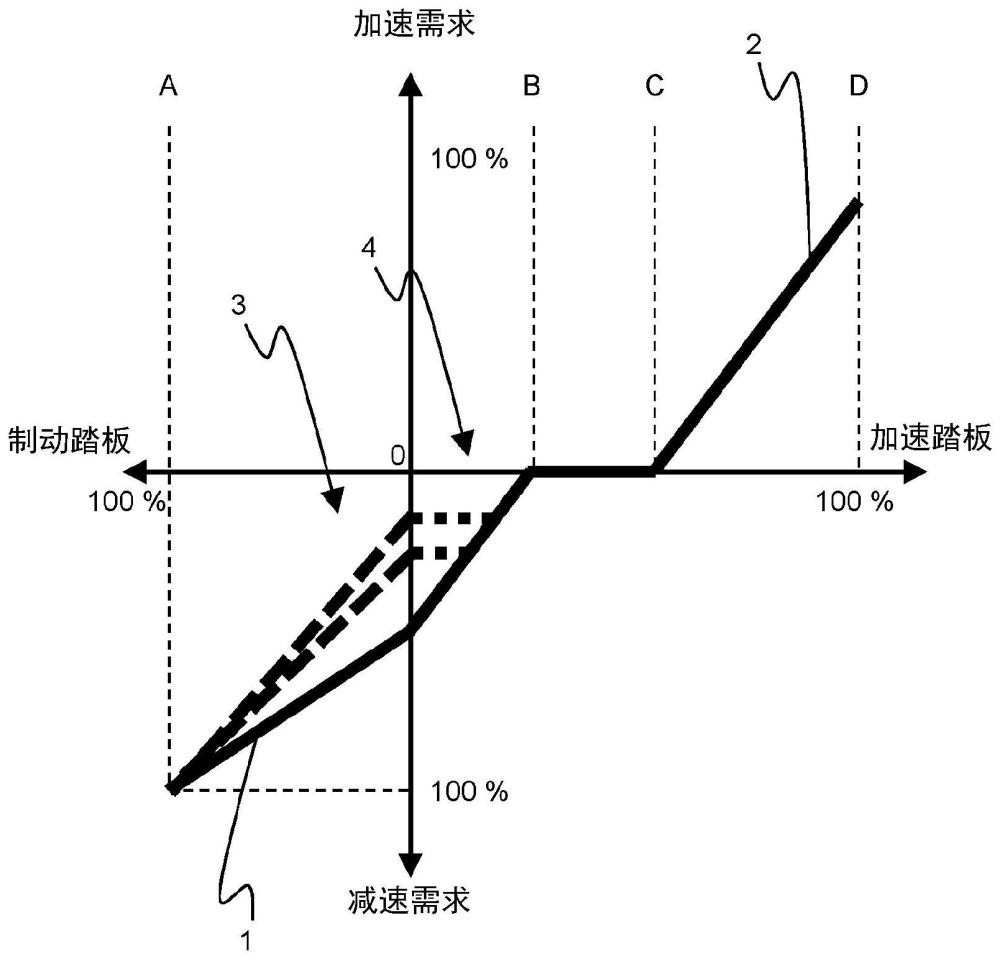
13、图1和图2示出了两种方法,其中,由加速踏板生成的减速需求与由制动踏板生成的减速需求之间的过渡不协调或仅针对特定情况协调。
14、图1示出了一种不协调的方法。
15、在向右延伸的轴上,来自加速踏板的输入值显示为从0%到100%,其中,最大输入值100%在右侧。在向左延伸的轴上,来自制动踏板的输入值显示为从0%到100%,其中,最大输入值100%在左侧。
16、在向上延伸的轴上,示出了从0%到100%的加速需求,其中,最大加速需求在轴的顶部为100%。在向下延伸的轴上,示出了从0%到100%的减速需求,其中,最大减速需求在轴的最低点为100%。
17、通常,踏板特性描述了踏板的输入值(踏板输入或踏板位置)、相应地驾驶员的输入(特别地描述了驾驶员踩下踏板的程度)与踏板的输出值、特别是作为车辆的其它系统或装置(例如减速装置和制动单元等)的输入值供应的减速需求值之间的相关性。
18、在图1中,示出了制动踏板特性1和加速踏板特性2。制动踏板特性1从输入值为0%时的零制动踏板减速需求延伸到100%制动踏板输入值时的100%制动踏板减速需求,其对应于总的最大减速需求。此时,最大减速需求点用a标记。
19、加速踏板特性曲线2在加速踏板的0%与100%的输入值之间延伸。所示的加速踏板特性2示出了典型的opd特性,其中,通过经由加速踏板的输入,驾驶员可以通过仅操作加速踏板来使车辆加速和减速。在输入值0%与点b之间,通过加速踏板生成减速需求。这意味着,如果驾驶员在该区段中操作加速踏板,则加速踏板的输出是减速需求、特别是另外的减速需求。此外,在点b与c之间,加速踏板的输出为零。这意味着,在该区段中,加速踏板既不生成减速需求也不生成加速需求。通常,这是使得车辆滑行的区段。在由点c和d限定的区段中,其中,d是最大加速需求点,加速踏板的输入值产生加速需求。
20、此外,两个可实现的减速潜力(deceleration potential)4被示出为水平虚线,车辆可以作为对由加速踏板生成的减速需求的反应来实现。这意味着,由于在0%输入值与b之间的部分中的可实现的减速潜力4在附图中位于加速踏板特性2的区段上方,因此例如由于减速装置或制动单元的失效,不能实现对应于由加速踏板生成的减速需求的车辆的完全减速。这意味着,可实现的减速潜力与当前可由车辆根据加速踏板特性2的减速需求来实现的减速相关。
21、从图1中可以看出,如果驾驶员从加速踏板切换到制动踏板,则在0%制动踏板输入时由制动踏板生成的制动需求不对应于在0%加速踏板输入时由制动踏板生成的减速需求,并且如果驾驶员没有达到对应的制动踏板输入值,则由加速踏板和制动踏板生成的需求会出现不连续。
22、图2示出了根据现有技术的部分协调方法,其中,调整制动踏板特性1,使得在0%输入值下由制动踏板生成的制动需求对应于在加速踏板输入为0%时由减速装置请求的最大减速需求。
23、这两种方法都具有下述缺点,即当驾驶员从加速踏板切换到制动踏板时,特别是当可实现的减速潜力4不对应于加速踏板的减速需求时,会出现或可能出现不连续。这在根据图1的方法的制动踏板的每次操作中发生,并且当由减速装置可实现的最大减速潜力不能实现时(例如由于电存储器处于满荷电状态(soc)并且不能再存储更多电能),在根据图2的方法的制动踏板的操作中发生。
技术实现思路
1、因此,本发明的目的是改进在驾驶员切换到制动踏板时对车辆的减速需求的生成。
2、该目的通过独立权利要求的主题来实现。有利的实施例是从属权利要求的主题。
3、根据本发明,一种用于调整车辆的制动踏板特性的方法,其中,所述车辆包括被配置成能够生成制动踏板减速需求的制动踏板和用于生成另外的减速需求的至少一个另外的减速需求生成装置,其中,所述车辆被配置成能够根据所述制动踏板减速需求和所述至少一个另外的减速需求进行减速,其中,所述方法包括以下步骤:
4、-步骤s1:确定作为所述另外的减速需求的结果的可实现的减速潜力;
5、-步骤s2:根据所述可实现的减速潜力生成用于在0%制动踏板输入时调整所述制动踏板特性的减速需求;以及
6、-步骤s3:调整所述车辆的制动踏板特性。
7、所述可实现的减速潜力优选地包括所述车辆的可实现的减速。特别地,所述可实现的减速潜力描述了由所述车辆根据另外的制动需求可以实现的最大减速。
8、优选地,根据步骤s1确定所述可实现的减速潜力包括根据对作为所述车辆对所述另外的减速需求、特别是最大的另外的减速需求的反应的所述车辆的当前减速的测量来确定所述可实现的减速潜力。优选地,通过使用加速器传感器或旋转传感器来测量所述车辆的当前减速,所述加速器传感器或旋转传感器优选地被配置成能够测量所述车辆的车轮的速度。
9、附加地或替代地,如果所述车辆被配置成能够监测其减速装置、特别是其减速装置的状态,则根据步骤s1的所述可实现的减速潜力可以从所述监测直接确定,或者,基于该监测来确定。例如,如果所述减速装置包括缓速器,所述缓速器被配置成能够通过将所述车辆的动能经由其动力传动系转换成热能来使所述车辆减速,则这种缓速器具有最大操作温度。如果达到或超过该温度,则车辆的控制减速装置或至少缓速器的控制单元必须降低所述缓速器的功率或者不能以一定功率操作所述缓速器。因此,由所述另外的制动需求引起的所述可实现的减速减小。这种可实现的减速可以通过监测所述缓速器的温度来确定。替代地或附加地,如果所述减速装置包括电机,所述电机被配置成能够通过电机在发电机模式下的操作来使所述车辆减速,其中,由所述电机生成的电力被供应到电能存储器或电制动电阻器,则可以由所述电机实现的减速受到能量存储器的容量或制动电阻器的温度的限制。因此,通过监测能量存储器的荷电状态或制动电阻器的温度,可以确定所述可实现的减速。附加地或替代地,如果所述减速装置包括摩擦制动器、特别是例如电致动或气动致动的摩擦制动器,则可以通过监测所述制动器的摩擦元件,特别是制动衬垫的磨损来确定所述可实现的减速潜力。
10、特别地,本发明涉及一种方法,其中,确定响应于另外的减速需求的车辆的可实现的减速。根据该可实现的减速,调整所述车辆的制动踏板特性,其中,根据所述可实现的减速潜力,生成在0%制动踏板输入时的制动踏板减速需求,并且相应地调整所述制动踏板特性。
11、优选地,如果所述车辆的可实现的减速对应于所述另外的减速需求的最大值,则根据步骤s3的调整形成下述制动踏板特性,其中,在0%制动踏板输入时的制动踏板减速需求对应于该减速需求。如果所述可实现的减速不对应于另外的最大减速需求,则根据步骤s3的调整形成下述制动踏板特性,其中,在0%制动踏板输入时的制动踏板减速需求被调整到该减速需求。例如,如果所述可实现的减速仅对应于所述另外的最大减速需求的50%,则在0%制动踏板输入时的制动踏板减速需求特别地相应地在步骤s2中生成,并且在步骤s3中调整到该减速需求。这意味着,制动踏板在0%制动踏板输入时生成对应于所述可实现减速的制动需求。优选地,通过将所述制动踏板特性的最大制动踏板减速需求点保持在100%制动踏板输入,实现了所述制动踏板特性相对于所述制动踏板输入的较低上升或增加。
12、优选地,所述车辆包括减速装置和/或制动单元,其中,所述减速装置和/或所述制动单元被配置成能够根据所述制动踏板减速需求和/或根据所述另外的减速需求使所述车辆减速。优选地,所述减速装置包括缓速器、制动器(特别是持久制动器(endurancebrake))和/或被配置成能够使所述车辆减速的电机,和/或,所述制动单元包括作为摩擦制动器的至少一个机械制动器,特别是盘式制动器和/或鼓式制动器。
13、优选地,在步骤s3中,所述制动踏板特性的最大制动踏板减速需求被设定在100%制动踏板输入处。这意味着,当制动踏板输入从0%增加到100%时,使得所述制动踏板开始生成其最大制动踏板减速需求的制动踏板输入是完全踩下制动踏板(100%制动踏板输入)的情况。有利地,这使得制动踏板特性允许驾驶员经由所述制动踏板很好地控制减速,因为所述制动踏板特性在整个可能的踏板输入范围内被调整。
14、替代地,在步骤s3中,所述制动踏板特性的最大制动踏板减速需求被设定在低于100%制动踏板输入的制动踏板输入处。在这种情况下,制动踏板在达到最大制动踏板减速需求之前的输入范围会缩短。这意味着,当所述制动踏板输入从0%增加到100%时,使得所述制动踏板开始生成其最大制动踏板减速需求的制动踏板输入是在低于100%的制动踏板输入处。有利地,这使得制动踏板特性允许驾驶员快速地生成最大制动踏板减速需求。特别地,该方法在紧急制动情况期间使用。
15、优选地,在步骤s3中,在0%制动踏板输入与引起所述最大制动踏板减速需求的制动踏板输入之间的制动踏板输入处设定所述制动踏板特性的制动踏板减速需求。在此设定的所述制动踏板减速需求可以根据查找表或根据数学计算式来设定。特别地,在0%与引起最大制动踏板减速需求的制动踏板输入之间的线性、递增或递减的制动踏板特性是可能的。
16、优选地,所述制动踏板特性的制动踏板制动需求从0%制动踏板输入到100%制动踏板输入或到引起所述最大制动踏板减速需求的制动踏板输入连续增大。
17、优选地,使所述制动踏板生成所述最大制动踏板减速需求的制动踏板输入处于100%的制动踏板输入。特别地,在步骤s3中,调整0%与100%制动踏板输入之间的制动踏板特性。例如,调整所述制动踏板特性的特定点。优选地,根据数学计算或根据查找表来执行调整。在0%与100%制动踏板输入之间的线性、递增或递减的制动踏板特性是可能的。在这种情况下,可以调整制动踏板的灵敏度。例如,可以在0%与100%制动踏板输入之间实现二次或多项式制动踏板特性。
18、优选地,所述可实现的减速潜力是最大可实现的减速潜力。通过考虑所述最大可实现的减速潜力,可以确定通过使用所述减速装置所述车辆可以完全减速到哪个减速。进一步优选地,所述可实现的减速潜力是针对0%加速踏板输入确定的。
19、优选地,所述另外的减速需求生成装置包括加速踏板(特别地被配置用于单踏板驾驶模式)、减速需求输入装置和/或驾驶员辅助功能。优选地,所述驾驶员辅助功能包括巡航控制功能。优选地,所述减速需求输入装置包括缓速器输入单元、特别是缓速器杆或被配置为接口的单元,驾驶员可以在其中输入期望的减速。
20、优选地,所述制动踏板特性包括作为制动踏板减速需求的以下元素中的一个:减速度值、制动扭矩、致动器力、致动器电流、致动器电压和/或致动器压力。相应地,所述至少另外的减速需求优选地包括相同的元素。所述制动踏板特性特别地基于驾驶员的输入。这意味着,所述制动踏板特性描述了根据特定的制动踏板输入生成的所述制动踏板减速需求。所述致动器力、所述致动器电流、所述致动器电压和/或所述致动器压力描述了被配置成能够激活所述制动单元的致动器的参数。所述致动器力可以描述施加到所述制动单元的机械制动器上用于生成制动扭矩或力的力。该致动器可以被配置为机电和/或流体致动器、特别是气动或液压致动器。作为机电致动器,致动器力可以由所述致动器电流和/或所述致动器电压来描述。当所述致动器被配置为流体致动器时,所述致动力可以通过作用在所述致动器的压力腔室中的流体压力来描述。所述致动器力、所述致动器电流、所述致动器电压和/或所述致动器压力也可以被分配给所述制动踏板特性的减速度值和/或制动力矩。
21、优选地,连续执行步骤s1、s2、s3中的至少一个,特别是连续执行步骤s1、s2、s3中的所有步骤。
22、根据本发明的另一方面,基于所述制动踏板减速需求和所述至少一个另外的减速需求生成主减速需求,其中,所述车辆被配置成能够根据所述主减速需求进行减速。该方面可以与上述方法相结合,或者可以将其视为单独的主题。优选地,所述制动单元和/或所述减速装置被配置成能够根据所述主减速需求使所述车辆减速。
23、优选地,通过从所述制动踏板减速需求和从所述至少一个另外的减速需求中选择减速需求或者通过将所述制动踏板减速需求和所述至少一个另外的减速需求中的至少一个相加来生成所述主减速需求。优选地,在选择减速需求的情况下并且当驾驶员开始经由所述制动踏板生成制动踏板减速需求时,在0%制动踏板输入时的制动踏板减速需求对应于引起所述车辆的当前减速的主制动需求。优选地,在将所述减速需求相加的情况下并且当驾驶员开始经由所述制动踏板生成输入时,在0%制动踏板输入时的制动踏板减速需求可以被设定为零制动踏板减速需求,因为在0%制动踏板输入时的主制动需求从由所述另外的减速需求生成装置生成的当前减速需求开始。
24、附加地或替代地,所述方法包括一种模式,其中,所述制动踏板减速需求和所述至少一个另外的减速需求相加,特别是相加成上面提到的主减速需求。这意味着,所述车辆的减速由至少所述制动踏板减速需求和所述至少一个另外的减速度需求的总和控制。优选地,该模式被配置为紧急模式,其中,重点不在于避免在生成减速需求时的中断,而是尽可能快地生成用于所述车辆的最大减速需求。特别地,当所述制动踏板被踩下的坡度超过预先确定的阈值时,可以激活该模式。优选地,在该模式中,所述制动踏板特性被调整为急剧上升。进一步优选地,生成所述最大减速需求的所述制动踏板输入在该模式中被移动到低于100%的制动踏板输入处,其中,所述制动踏板减速需求和所述另外的减速需求相加。有利地,如果该模式被配置为紧急模式,则在驾驶员踩下所述制动踏板时,所述最大减速需求较早。特别地,如果驾驶员在紧急情况下没有将所述制动踏板踩至100%制动踏板输入,则由驾驶员的输入生成最大制动需求的概率会增加。
25、优选地,所述可实现的减速潜力通过获知由所述减速装置和/或由不同减速装置的组合和/或由一个或多个减速装置与所述制动单元的组合正在实现的减速的量来确定,特别是在opd模式下驾驶时。根据本发明的该方面,所述制动单元和/或所述减速装置的控制参数可以被调整以对所述车辆的实际行为作出反应。特别地,这些组合包括一个或多个电机、一个或多个缓速器和/或一个或多个制动器,特别是摩擦制动器。
26、在下面,列出了本发明的特定方面,这些方面并不意味着限制本发明的范围。而是,描述了另外的优选实施例。
27、优选地,所述减速装置包括缓速器、制动器(特别是持久制动器和/或机械制动器,特别是摩擦制动器)和/或被配置成能够使所述车辆减速的电机和/或涡流制动器。
28、优选地,所述方法在opd模式期间执行。替代地或附加地,所述方法在一般模式期间执行。
29、优选地,所述可实现的减速潜力描述了使所述车辆减速的所述车辆的参数。特别地,所述可实现的减速潜力可以通过由所述减速装置和/或所述制动单元生成的制动扭矩和/或制动力和/或可实现的减速度值本身来表征。附加地或替代地,所述可实现的减速潜力也可以包括加速度或减速度值。
30、所述可实现的减速潜力可受到所述减速装置和/或所述制动单元的常规失效的影响,其中,特别地,所述减速装置和/或所述制动单元不能生成所述车辆的所需的制动力或制动扭矩或总体上所需的减速。
31、此外,如果所述减速装置包括具有电存储器的电动力传动系,则所述可实现的减速潜力可能会受到所述车辆的电存储器的soc的影响。如上所述,当电能存储器满了并且不能存储更多的电能时,由所述电动力传动系引起的减速必须减小或者该操作必须停止。电流的限制也会影响所述可实现的减速潜力。
32、失效的另一个原因是当所述减速装置或所述减速装置的一部分的温度超过预先确定的阈值时,这使得所述减速装置降低其减速功率并相应地降低其对所述车辆的减速效果。此外,为了将温度保持在所述预先确定的阈值以下,所述减速装置必须以降低的减速功率操作,从而使得对所述车辆的减速效果降低。
33、此外,根据步骤s3调整所述制动踏板特性或者根据步骤s1确定可实现的减速潜力可以包括考虑所述制动单元和/或所述减速装置的反应时间。这意味着,如果所述制动单元或减速装置对新的减速需求反应缓慢,则所引起的减速会在一段时间内增加。这意味着,根据所述另外的减速需求的所述可实现的减速潜力也在该时段内增加。当使用缓速器、特别是耗散缓速器时,可发生这种反应。这种反应可以在步骤s1或步骤s3中通过测量或通过获知相应的制动单元或减速装置的反应来考虑。
34、此外,参考上述关于现有技术的限制方面。
35、优选地,所述可实现的减速潜力是最大可实现的减速潜力。通过考虑所述最大可实现的减速潜力,可以确定通过使用所述减速装置所述车辆可以完全减速到哪个减速。进一步优选地,所述可实现的减速潜力是针对0%加速踏板输入确定的。
36、优选地,所述制动单元包括作为摩擦制动器的至少一个机械制动器,特别是盘式制动器和/或鼓式制动器。
37、优选地,所述制动踏板特性从由所述减速装置实现的实际减速和/或由所述制动单元实现的最大减速来设定或调整,特别是在opd模式期间。通过长期地考虑所述实际减速,可以长期地或连续地执行所述制动踏板特性的调整。这产生了一种方法,其中,可以长期地调整所述减速装置与所述制动单元之间的过渡,使得即使没有跃变,也可以相应地实现对快速增加的制动需求的反应或者从所述加速踏板到所述制动踏板的切换。此外,也可以考虑由所述制动单元实现的减速,特别是最大减速,以对所述制动单元的(条件)变化做出反应。
38、优选地,当所述减速装置包括多于一个的用于使所述车辆减速的装置时,可以由控制单元和/或由驾驶员选择哪个装置用于减速。例如,在下坡路线上驾驶之前,由所述减速装置对所述车辆的减速由液压缓速器引起,而下坡路线上的减速由电动力传动系引起。因此,通过进入下坡路线来避免电存储器的满soc,使得可以执行通过所述电动力传动系的减速。
39、在下面,使用如上所述的方法描述了另外的实施例。以下实施例中的每一个优选地包括如由与所述方法相关的前述描述所描述的相应特征。
40、根据本发明的另一方面,提供了一种用于执行如上所述的方法的装置,其中,所述装置包括:
41、-用于接收输入数据、特别是减速需求和/或可实现的减速潜力、例如减速度值的接口;
42、-用于提供输出数据、特别是目标制动踏板特性和/或用于调整所述制动踏板特性的信号的接口;以及
43、-被配置成能够执行如上所述的方法的数据处理单元。
44、优选地,由所述装置接收的所述减速需求是制动踏板减速需求、至少一个另外的减速需求和/或主减速需求。
45、优选地,所述装置被配置为控制单元,特别是制动或驱动控制单元。
46、根据本发明的另一个方面,提供了一种用于执行如上所述的方法的车辆,其中,
47、所述车辆被配置用于执行如上所述的方法,和/或其中,所述车辆包括如上所述的装置,其中,
48、所述车辆优选地被配置为商用车辆、卡车、挂车、公共汽车和/或牵引车辆和挂车的组合,和/或其中,
49、所述车辆优选地包括如上所述的减速装置和制动单元。
50、根据本发明的另一个方面,提供了一种计算机程序产品,其包括程序代码,所述程序代码被配置成使得当在数据处理单元、特别是在如上所述的数据处理单元上执行时,所述程序代码使所述数据处理单元执行如上所述的方法。
51、根据本发明的另一方面,提供了一种包括如上所述的计算机程序产品的存储介质。根据该方面,可以将所述程序代码提供给多个数据处理单元,以将它们配置用于执行根据本发明的方法。所述存储介质可以包括cd-rom、记忆棒和/或云存储器。
52、根据上述方面的每个主题可以包括描述上述方法时提到的相应特征。例如,所述车辆可以包括作为摩擦制动器的机械制动器,特别是盘式制动器和/或鼓式制动器。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:F·贝内加斯迪亚斯,G·利普塔克,A·库陶什
- 技术所有人:克诺尔商用车制动系统有限公司
- 我是此专利的发明人
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、林老师:1.智能驾驶技术研究 2.智能汽车人机交互研究 3.自动驾驶预期功能安全及可靠性 4.驾驶功能与车辆动力学数据融合 5.驾驶场景大数据分析技术 6.车辆性能研究
- 2、朱老师:1.新能源汽车电驱动技术 2.轮毂电机驱动与控制 3.开关磁阻电机驱动系统控制 4.智能电动汽车
- 3、徐老师:1.内燃机节能及排放控制技术 2.汽车节能与新能源汽车技术 3. 车辆现代设计理论与方法
- 4、王老师:1.机械设计原理与方法 2.生理系统耦合及生物力学 3.康复工程学
- 5、唐老师:1.高效节能装备 2.流动稳定性 3.汽车流场分析和淀粉糖工艺技术。
- 如您是高校老师,可以点此联系我们加入专家库。
- 还没有人留言评论。精彩留言会获得点赞!