用于内燃机被更换为具有电机的电力牵引驱动装置的机动车辆的电子转换套件、具有该转换套件的机动车辆以及该转换套件的操作方法与流程
本发明涉及一种用于其内燃机被更换为具有电机的电力牵引驱动装置的机动车辆的电子转换套件。本发明还涉及具有这种转换套件的电力驱动机动车辆以及该转换套件的操作方法。
背景技术:
1、迄今为止,汽车(乘用车)都是作为燃烧发动机汽车(汽油发动机/柴油发动机汽车)开发、制造和销售的,并且它们可以一直运行到不再经济地运行为止。车辆的使用寿命在过去几十年里已大大延长(根据institute car duisburg的研究:德国25%的车辆车龄超过15年;平均车龄为9.6年)。当今的许多车辆从技术状况来看比几年前的可行驶时间更长,持久耐用性或防锈性都有很大提高。因此,车身、底盘或附件可以无故障地进一步使用。
2、目前,将燃烧发动机汽车转换为电动车辆(ev)的情况几乎全部发生在车龄较长的车辆上(大约2005年之前制造),不考虑现有电子器件,尤其是驾驶者辅助系统(adas-高级驾驶者辅助系统)。这里,缺点是车龄较长的车辆在常规使用后的预期剩余使用寿命较低,因此许多车辆的转换将不再有利可图。转换更现代的车辆更加有利可图,但其中包括带有用于适配于内燃机的特性的复杂电子车辆功能的控制装置的数据网络。
3、因此,基础车辆的电子架构的复杂性使得新驱动部件的集成在技术上昂贵,这对于在较新车辆中改装为电力牵引驱动装置来说是一个缺点。这导致转换要么必定损失许多重要的adas/电子模块,要么需要昂贵的控制装置和互连逻辑的后期开发。迄今为止,这些成本和时间支出阻止了此类重构。
技术实现思路
1、本发明基于将包括内燃机的机动车辆转换成纯电力驱动的机动车辆(电动车辆)的目的。
2、作为解决方案,本发明提供了独立权利要求的主题。这些解决方案的有利改进方案通过从属权利要求、以下描述以及附图来描述。
3、作为解决方案的一个方面,本发明提供了一种用于机动车辆的电子转换套件。其中,本发明设想借助于该转换套件来将机动车辆中的内燃机更换为或已经将其更换为具有电机的电力牵引驱动装置,并且机动车辆的电子功能将适配于转换后的牵引驱动装置,从而适配于具有至少一个电机的纯电力牵引驱动装置。
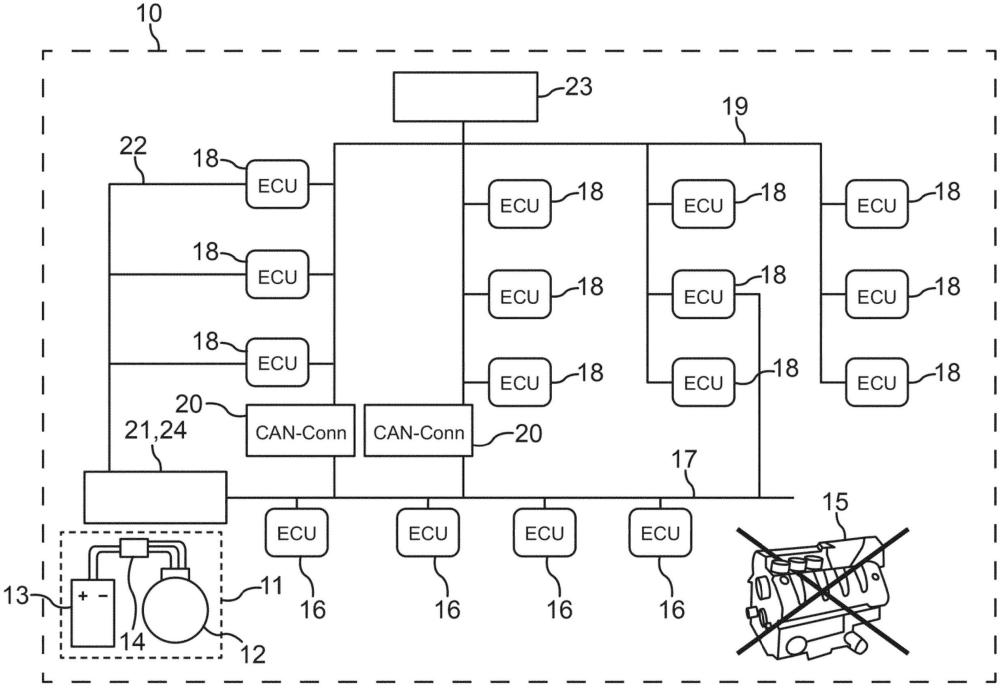
4、作为解决方案,本发明提出,转换套件包括至少一个总线模块,该总线模块被配置为一方面连接机动车辆的至少一个现有总线系统和/或现有控制装置,另一方面连接电力牵引驱动装置的至少一个新的总线系统和/或新的控制装置。通过至少一个总线模块,在此提供了一种处理器电路,该处理器电路被配置为接收来自至少一个现有总线系统和/或现有控制装置和/或新的总线系统和/或新的控制装置的信号,以借助于预定的信号转换来变换或转换这些接收到的信号并且传递相应地变换后的信号(传递到至少一个现有控制装置和/或新的控制装置和/或传递到至少一个现有总线系统和/或新的总线系统中)。特别地,来自现有部件(现有总线系统和/或现有控制装置)的信号被变换为用于新部件(新的总线系统和/或新的控制装置)的信号和/或来自新部件的信号被变换为用于现有部件的信号。另外,借助于残余总线仿真而人为地生成内燃机的至少一个缺失的或不存在的组件的信号。因此,对内燃机的至少一个组件进行仿真。换言之,对用信号通知内燃机的功能(例如,内燃机的转速测量)的组件进行仿真。这种组件也可以是控制装置,例如发动机控制装置。
5、这里,前缀“现有”用于这样的车辆部件(例如总线系统和/或控制装置),其在转换之前已经存在,也用于内燃机的运行。这里,前缀“新”用于这样的车辆部件(例如总线系统和/或控制装置),其通过转换被新添加到纯电力牵引驱动装置(去除了内燃机)并且是为了运行电力牵引驱动装置而提供的。
6、通常,所述相应的总线模块可以被配置为用于连接到新总线系统的控制装置(ecu-电子控制单元)或者被配置为用于连接到至少一个现有总线系统和至少一个新总线系统的总线网关。相应的总线模块可包括至少一个电气总线端子和/或至少一个用于到控制装置(现有控制装置和/或新控制装置)的连接电缆的端子,以提供用于信号传输或数据传输的电连接。相应的总线模块可设置用于例如连接到can总线(can-控制器局域网),因此它在这里也被称为e-can模块,其中优选地在此不理解为对can总线加以限制。
7、该转换套件包括处理器电路,其由至少一个总线模块提供。在单个总线模块的情况下,它可以是单个总线模块的集成处理器电路,或者在多个总线模块的情况下,它可以是多个总线模块中的分布式电路,所述多个总线模块共同提供这里描述的功能。处理器电路被配置为执行所述信号转换和所述残余总线仿真。通过信号转换来执行一方面机动车辆的至少一个现有总线系统和/或现有控制装置与另一方面改造后的电力牵引驱动装置的至少一个新总线系统和/或新控制装置之间的信号通信或变换,从而实现信号耦合。由于在转换后的内燃机组件被拆卸而丢失的机动车辆运行所需的信号通过残余总线仿真(例如借助于该组件的仿真)而人为地生成。
8、本发明的优点在于,可以确保车辆功能的进一步操作,这些功能在制造商方面针对内燃机进行了适配,因此需要内燃机的组件和/或控制装置的存在和/或操作。特别相关的情况是内燃机的发动机控制装置:现在可以确保该控制装置进一步发挥作用(如果其保留在机动车辆中)和/或其信号进一步存在于现有总线系统中(如果它是从机动车辆上拆卸下来的)。这样的控制装置例如可以是部件保护/集群的一部分,所述部件保护/集群必须在机动车辆中进一步运转并且必须在现有总线系统(例如can总线)中运转。为了防止故障和/或错误消息,所需的输入信号现在可以在发动机控制装置和/或另一现有控制装置处生成。
9、转换套件的至少一个总线模块可以基于当前驱动情形而生成预设信号,并且如果例如发动机控制装置仍然存在并且希望得到内燃机组件的信号,则将它们输入到发动机控制装置中。例如,相应的总线模块可以接收以下信息作为输入(输入信号):行驶速度和/或加速踏板位置和/或esp控制(esp–)和/或abs控制(abs–防抱死系统)的激活信号。作为输出(输出信号),例如可以人为地生成不再存在的内燃机的当前转速和/或转速变化。
10、需要指出的是,在一个实施例中,转换套件可以由一个总线模块组成,也可以由多个总线模块单独组成。在其他实施例中,一个或多个总线模块和至少一个附加部件可以是转换套件的组成部分,例如稍后提到的适配器。
11、这里,术语“电力牵引驱动装置”也可以被理解为还包括电能存储器(电池)。
12、本发明还包括产生额外优点的改进方案。
13、转换套件的一种改进方案包括,所述处理器电路被配置为接收来自机动车辆的加速踏板的传感器电路的传感器信号以进行信号转换,并执行由传感器信号通知的加速踏板的物理运动和取向到用于电力牵引驱动装置的电气和/或数字信号的转换。由此,可以把节气门或喷射不再借助于加速踏板来控制考虑进来。加速踏板位置和/或加速踏板运动与用于电力牵引驱动装置的信号的关联可以借助于至少一条特征线来实现。其中,通过选择相应的特征线路径,可以设定电力牵引驱动装置对加速踏板致动的“响应行为”(例如“活跃”或“不活跃”)。
14、一种改进方案包括,处理器电路被配置为用于信号转换,接收来自机动车辆的现有变速器(在此,其中可以存在测量电路)的挡位选择信号(该信号表示接合的倒挡)并限制倒车速度。该限制可被实现为在3km/h到20km/h的范围内的最大值。这有利地防止电机从停止起的加速能力导致非期望的快速倒车,因为电机的起动扭矩可能大于先前存在的内燃机的起动扭矩。
15、一种改进方案包括,处理器电路被配置用于信号转换,以将机动车辆的自动距离控制和/或自动驾驶速度控制(acc-自适应巡航控制)的加速命令(其被发送至内燃机的发动机控制装置)转换为用于电力牵引驱动装置的调节信号。因此,可以维持自动距离控制和/或自动驾驶速度控制的驾驶辅助功能。专家可以在试驾时例如通过分析现有总线系统中的信号来确定必须转换acc的哪些加速命令。专家可根据电机的期望或预设的驱动行为来设置合适的调节信号。驱动行为的可能变化例如由控制行为的预设时间常数和/或预设死区时间产生。
16、一种改进方案包括,处理器电路被配置为基于加速踏板传感器和/或制动踏板传感器的相应信号和/或液压制动回路的制动压力信号和/或自动紧急制动(aeb–自动紧急制动)和/或测距雷达来检测紧急制动情形的预定信号模式,并且在检测到紧急制动情形的情况下发送用于切换和/或停用和/或减小电力牵引驱动装置的驱动扭矩的切换信号。例如可借助于在试验场上进行的试驾来生成指示紧急制动情形的信号模式。信号模式可通过信号数据和/或隐马尔可夫模型和/或人工神经网络来存储。通过减小驱动扭矩,所产生的优点是防止了电机转子不必要的额外推力。自动紧急制动辅助装置在识别出严重事故风险(例如,与物体的距离快速减小)的情况下可通过二进制输入信号(二进制的是/否)来发出启动自动制动操作的信号。作为输出的切换信号可发出以下信号:“释放加速踏板”,从而仿真释放加速踏板。这里,电机的转子也可例如通过发电机操作(再生)或借助于制动器操作被主动制动。
17、一种改进方案包括,处理器电路被配置为根据电机的当前电机状态借助于残余总线仿真来生成内燃机的人为操作信号,特别是发动机转速的信号,并且将其通知机动车辆的至少一个现有控制装置和/或对至少一个缺失和/或不存在的部件——特别是汽油泵和/或喷射系统和/或催化转化器(例如拉姆达探头)和/或质量空气流量传感器——的操作进行仿真。残余总线仿真的实现方式本身从现有技术中是已知的。在转换套件的背景下,可以有利地防止现有控制装置在例如来自或位于发动机控制装置和/或拉姆达探头处的输入值缺失的情况下产生错误。可借助于至少一条特征线来生成人为操作信号,以生成对应于当前驱动状态的操作信号。可以通过以下方式确定它们:在测试车辆中,信号例如在其中存在的发动机控制装置中被滤除。也可以在实验室中进行仿真计算以确定特征线。除了特征线之外或代替特征线,数字车辆模型也可作为残余总线仿真的组成部分来操作。可以在每个要重建的车型的e-can模块中读取每个现有部件的车型特有的特征线,从而进行适当的配置。因此,e-can模块的逻辑基本上得到维持,并且可以有利地以较小的努力针对新车进行适配,而不需要根本性的新开发。
18、然而,需要集成一些控制装置,即使它们在没有内燃机的情况下不再如针对发动机控制装置的情况那样履行实际功能。于是,尽管进行了转换,这样的控制装置仍必须至少通过其信号保持存在。因此,一种改进方案包括,处理器电路被配置为将发动机控制装置的仿真状态信号发送至现有控制装置的防盗保护装置。因此,这样的机构可以进一步用作标准,并且机动车辆可以进一步在品牌车间中维修,而不需要例如启动防盗保护装置。作为该改进方案的替代,在一种改进方案中,处理器电路被配置为向针对防盗保护提供的装置集群的控制装置发送其在预定的正常操作中期望的输入信号。专家可以从装置的明细中获取正常操作(不存在盗窃)中预期的输入信号。因此,要么在转换时保持控制装置在机动车辆中可操作,其中对所需的输入信号进行仿真,使得控制装置在防盗保护装置集群中进一步起作用,要么对已经变得可有可无的控制装置(包括防盗保护部件)进行仿真,使得防盗保护进一步发挥作用,但可以移除控制装置。
19、一种改进方案包括,处理器电路包括用于接收车辆专有软件配置文件的数据接口,并且被配置为根据经由数据接口接收的机动车辆的软件配置文件来配置和操作机动车辆中的信号转换和/或残余总线仿真。因此,由于车辆自身设备而产生的车辆专有通信信号可在转换中灵活地进行后配置。特别地,软件配置文件包括所谓的通信矩阵,其具有至少一个现有总线系统的信号类型和通信参数。它可以例如从至少一个现有控制装置或在转换中拆卸的控制装置读出和/或从机动车辆的制造商取得。
20、一种改进方案包括,处理器电路被配置为计算当前制动效果和/或回收功率以用于速度控制并调节电力牵引驱动装置的当前施加扭矩(即正和负)从而调节驾驶速度,并且接收电力牵引驱动装置的当前扭矩和/或当前电流强度的相应实际值以及当前行驶速度和理论/预期/设定速度的相应值作为输入,并且将新扭矩和/或新转速和/或新电流强度和/或新回收制动功率的相应理论值作为输出发送到电力牵引驱动装置。因此,现有控制装置的速度控制本身不必重新配置。
21、一种改进方案包括,处理器电路被配置为接收前方物体的检测的相应实际值和与所识别的物体的当前距离作为自动速度适配(acc)的输入,并将新扭矩和/或新转速和/或新电流强度和/或新回收制动功率的相应理论值作为输出发送到电力牵引驱动装置,其中该输出特别是被实现为对扭矩和/或转速和/或电流强度和/或回收功率的增量控制。这里被视为基础的实际值例如可从用于环境监测的现有控制装置接收。通过增量控制,产生围绕电力牵引驱动装置本身的内控制环的外控制环。由此,至少一个总线模块可通过逐步地或连续地跟踪内控制环的理论值来将内控制环的控制引向最终目标值。这在例如设置用于实现目标值的时间常数方面具有优势,从而在电力牵引驱动装置的响应行为方面具有优势。因此,它可以针对内燃机的响应行为进行适配,例如以避免跳跃的驱动行为。
22、一种改进方案包括,处理器电路被配置为将速度信号发送到至少一个用于泊车辅助(特别是自动化的2级)的声学的信号发生器(所谓的泊车蜂鸣器),用于启动相应的信号发生器,和/或根据转向信号发出机动车辆当前自动纵向引导的信号(加速和制动)。在2级中,机动车辆可从驾驶者的角度自动转向(横向引导),但驾驶者仍然必须加速和制动(纵向引导)。接收泊车操作的开始和停车位布置和/或停车位尺寸以及当前驾驶速度(来自至少一个现有控制装置)及方向盘的当前转向位置(来自泊车辅助的传感器电路和/或现有控制装置)和挡位选择杆的当前位置的相应信号作为输入,并且,作为已开始的泊车操作期间的输出,根据调整后的方向盘的转向位置调节电动牵引驱动装置的转矩和/或转速。因此,泊车操作是完全自动实施的。
23、一种改进方案包括,转换套件包括用于相应总线端子插头的至少一个适配器插头。这样可以对于不同的车辆型号快速安装/转换。优选地,在转换套件中提供用于避免因拆卸内燃机的电子部件而出现的“开路”连接的插头触点。
24、一种改进方案包括,处理器电路被配置为经由至少一个现有总线系统将电力牵引驱动装置的状态信号传递至机动车辆的外部基于无线电联网/通信网络的互连的连接模块(例如,移动无线电模块和/或wifi无线电模块)。优选的状态信号可以是充电状态、健康状态、用于由于充电配置而启动充电操作的充电命令和温度。有利地,这允许将总线模块连接到连接模块/连接单元以用于传输状态并允许例如从服务器单元或从移动装置进行远程控制(充电/负载管理)的可能性。具体地,处理器电路被配置为经由连接模块将状态信号发送至互联网服务器和/或便携式移动设备(所谓的智能设备,例如智能手机或平板电脑或智能手表)的和/或远程控制服务器的软件应用程序,用于请求和响应充电行为(充电功率的功率控制),以实现公共电网的电网稳定和/或价格优化的充电和/或放电。
25、一种改进方案包括,处理器电路被配置成通知充电状态和/或剩余里程和/或温度和/或用预定的更换信号替换不再相关的内燃机的状态变量,特别是油压、转速、油箱填充液位,以避免人机界面(hmi)出现错误消息。
26、一种改进方案包括,处理器电路被配置为,如果电力牵引驱动装置接收到充电电流和/或经由基于无线电的通信链路接收到远程控制命令,则根据驾驶者的操作输入来执行另外的加热器(代替现在缺失的内燃机的废热)的加热/通风控制,和/或控制机动车辆的预空气调节。它可以借助于已经描述的连接模块的连接功能经由服务器和/或软件应用程序(所谓的app)来实现。另外的加热器可包括例如至少一根用于电气地加热(电加热)的盘绕丝。
27、一种改进方案包括,处理器电路被配置为将来自至少一个新总线系统和/或用于诊断功能的新控制装置的信号经由至少一个现有总线系统传输至obd2端口(obd-车载诊断)。因此,转换后的机动车辆也可以在车间中以已知的方式进行诊断。
28、作为该解决方案的又一方面,本发明提供了一种具有纯电力牵引驱动装置——即没有内燃机的牵引驱动装置——的机动车辆。在该机动车辆中,至少两个总线系统经由根据本发明的转换套件的一个实施例连接。该总线系统特别是上述意义上的至少一个现有总线系统和至少一个新总线系统。仅举例而言,纯电力牵引驱动装置可包括同步电机和/或异步电机和/或同步磁阻电机作为相应的电机。牵引驱动装置可包括一个电机或多个电机。机动车辆优选被配置为汽车,特别是乘用车或卡车,或者被配置为客车或摩托车。
29、作为该解决方案的另一方面,本发明提供了一种用于操作随后被转换为电力牵引驱动装置的机动车辆的方法。至少一个总线模块一方面连接机动车辆的至少一个现有总线系统和/或现有控制装置,另一方面连接电力牵引驱动装置的至少一个新总线系统和/或新控制装置,并且这里,至少一个总线模块的处理器电路从至少一个现有总线系统和/或现有控制装置和/或新总线系统和/或新控制装置接收信号,并借助于预定信号转换来变换它们并传递变换后的信号。内燃机的至少一个(停用和/或拆卸了的)不存在的组件的信号借助于残余总线仿真来人为地生成。因此,它们是描述机动车辆中(例如在缺失的拉姆达探头处)缺失的物理过程的信号。因此,为了进行转换,至少一个电机可联接到机动车辆的动力传动系统,例如联接到现有变速器的法兰。然后,总线模块将至少一个现有总线系统和/或现有控制装置连接或联接到随后安装的至少一个新总线系统和/或新控制装置。
30、根据本发明的方法的改进方案,其包括已经在根据本发明的转换套件的改进方案的上下文中描述的特征,也属于本发明。为此,这里不再描述根据本发明的方法的相应改进方案。
31、处理器电路可包括数据处理装置或处理器装置,其被配置为执行根据本发明的方法的实施例。这里,处理器电路可以包括至少一个微处理器和/或至少一个微控制器和/或至少一个fpga(现场可编程门阵列)和/或至少一个dsp(数字信号处理器)。此外,处理器装置可包括程序代码,该程序代码被配置为在由处理器电路执行时执行根据本发明的方法的实施例。程序代码可存储在处理器电路的数据存储器中。
32、本发明还包括所描述的实施例的特征的组合。因此,本发明还包括这些实现方案:如果这些实施例没有被描述为相互排斥的话,则每个实现方案都包括多个所描述的实施例的特征的组合。
- 还没有人留言评论。精彩留言会获得点赞!