一种车辆电动座椅调节方法、系统、设备及介质与流程
本技术涉及智能控制,具体涉及一种车辆电动座椅调节方法、系统、设备及介质。
背景技术:
1、随着汽车制造技术的不断发展,人们对汽车的要求越来越高,如何满足用户个性化需求以及如何提高汽车的乘座舒适性、安全性和环保性已成为车身控制的重要发展方向。面向服务架构(service-oriented architecture,简称soa)是一个组件模型,其将应用程序的不同功能单元(通常称为服务)进行拆分,并通过这些服务之间良好的接口和协议联系起来,以实现不同功能逻辑模块的相互交互及数据交互。其中,汽车电动座椅能够通过电机的控制调节座椅的前后位置、上下高度、靠背角度等,汽车电动座椅的控制调节正向多功能化发展。
2、相关技术中,汽车电动座椅通常由座椅靠背、头枕、坐垫、腰托、座椅滑轨、控制及调节部分等构成,对于座椅的调节控制,主要采用通过霍尔传感器采集座椅的位置信息,通过开关输入检测座椅的运动请求。然而,由于座椅装配工艺、传感器安装误差和滑轨磨损等问题,座椅的位置获取存在一定的误差,进而影响座椅的控制精度。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明提供一种车辆电动座椅调节方法、系统、设备及介质,以解决上述滑轨磨损等问题造成座椅的位置获取存在一定的误差,进而影响座椅的控制精度的技术问题。
2、为解决上述技术问题,本技术的技术方案如下:
3、第一个方面,本技术提供一种车辆电动座椅调节方法,所述电动座椅设置有前后轴,所述前后轴设置有用于限定向前运动行程的第一软止点和第一硬止点,所述车辆电动座椅调节方法包括:
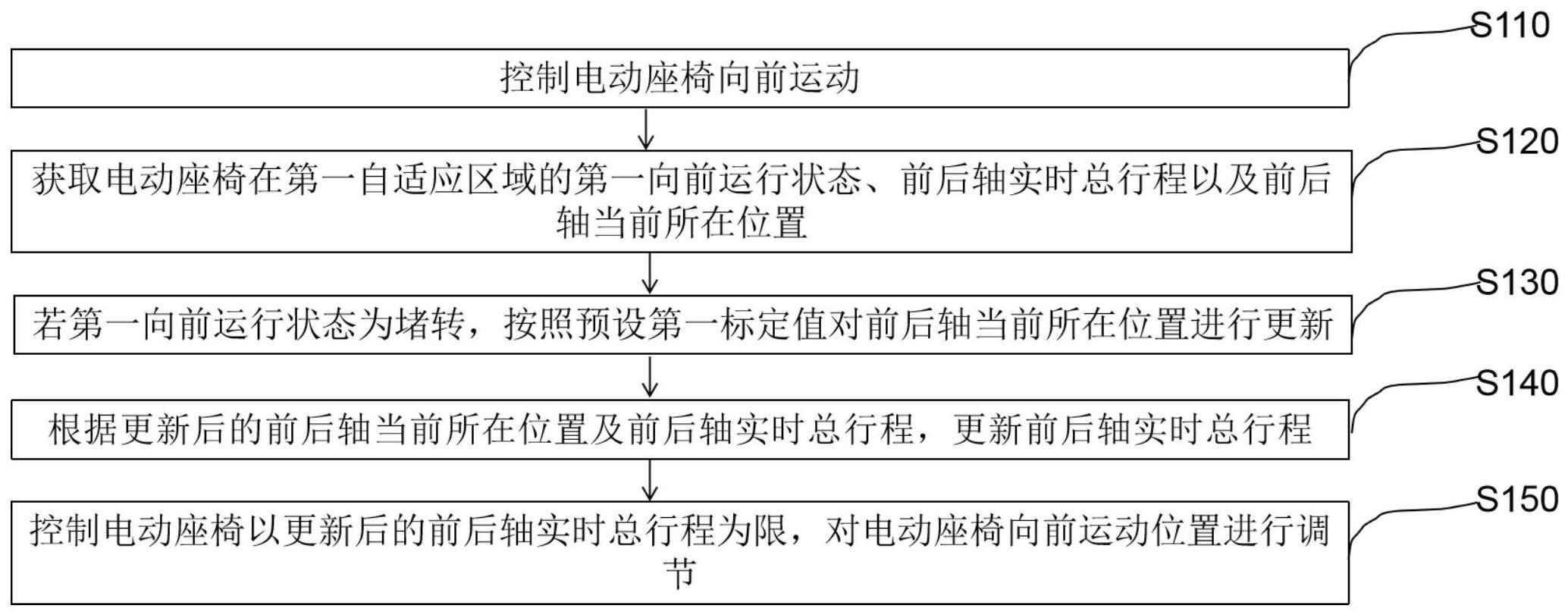
4、控制电动座椅向前运动;
5、获取电动座椅在第一自适应区域的第一向前运行状态、前后轴实时总行程以及前后轴当前所在位置,所述第一自适应区域为以第一软止点为中心点,以第一预设距离阈值为间距形成的区域,所述第一向前运行状态包括堵转;
6、若所述第一向前运行状态为堵转,按照预设第一标定值对所述前后轴当前所在位置进行更新,所述预设第一标定值大于0;
7、根据更新后的前后轴当前所在位置及所述前后轴实时总行程,更新前后轴实时总行程;
8、控制所述电动座椅以更新后的前后轴实时总行程为限,对所述电动座椅向前运动位置进行调节。
9、在本技术的一示例性实施例中,所述车辆电动座椅调节方法,还包括:
10、获取电动座椅的第二向前运行状态,第二向前运行状态包括第三向前运动状态和在第二自适应区域的第四向前运行状态,所述第二自适应区域为以第一硬止点为第一起始点,沿向前运动方向距离所述第一起始点第二预设距离阈值形成的区域,所述第三向前运动状态包括超过第一硬止点继续向前运动,所述第四向前运行状态包括堵转;
11、若所述第三向前运动状态为超过第一硬止点继续向前运动,且所述第四向前运行状态为堵转,按照预设第二标定值对所述前后轴当前所在位置进行更新,所述预设第二标定值小于0;
12、根据更新后的前后轴当前所在位置及所述前后轴实时总行程,更新前后轴实时总行程;
13、控制所述电动座椅以更新后的前后轴实时总行程为限,对所述电动座椅向前运动位置进行调节。
14、在本技术的一示例性实施例中,所述前后轴还设置有用于限定向后运动行程的第二软止点和第二硬止点,所述车辆电动座椅调节方法还包括:
15、控制所述电动座椅向后运动;
16、获取电动座椅在第三自适应区域的第一向后运行状态,所述第三自适应区域为以第二软止点为中心点,以第三预设距离阈值为间距形成的区域,所述第一向后运行状态包括堵转;
17、若所述第一向后运行状态为堵转,按照预设第三标定值对所述前后轴当前所在位置进行更新,所述预设第三标定值大于0;
18、根据更新后的前后轴当前所在位置及所述前后轴实时总行程,更新前后轴实时总行程;
19、控制所述电动座椅以更新后的前后轴实时总行程为限,对所述电动座椅向后运动位置进行调节。
20、在本技术的一示例性实施例中,所述车辆电动座椅调节方法还包括:
21、获取电动座椅的第二向后运行状态,第二向后运行状态包括第三向后运动状态和在第四自适应区域的第四向后运行状态,所述第四自适应区域为以第二硬止点为第二起始点,沿向后运动方向距离所述第二起始点第四预设距离阈值形成的区域,所述第三向后运动状态包括超过第二硬止点继续向后运动,所述第四向后运行状态包括堵转;
22、若所述第三向后运动状态为超过第二硬止点继续向后运动,且所述第四向后运行状态为堵转,按照预设第四标定值对所述前后轴当前所在位置进行更新,所述预设第四标定值小于0;
23、根据更新后的前后轴当前所在位置及所述前后轴实时总行程,更新前后轴实时总行程;
24、控制所述电动座椅以更新后的前后轴实时总行程为限,对所述电动座椅向后运动位置进行调节。
25、在本技术的一示例性实施例中,所述电动座椅还设置有左右轴,所述左右轴设置有用于限定向左运动行程的第三软止点和第三硬止点,所述车辆电动座椅调节方法还包括:
26、控制所述电动座椅向左运动;
27、获取电动座椅在第五自适应区域的第一向左运行状态、左右轴实时总行程以及左右轴当前所在位置,所述第五自适应区域为以第三软止点为中心点,以第五预设距离阈值为间距形成的区域,所述第一向左运行状态包括堵转;
28、若所述第一向左运行状态为堵转,按照预设第五标定值对所述左右轴当前所在位置进行更新,所述预设第五标定值大于0;
29、根据更新后的左右轴当前所在位置及所述左右轴实时总行程,更新左右轴实时总行程;
30、控制所述电动座椅以更新后的左右轴实时总行程为限,对所述电动座椅向左运动位置进行调节。
31、在本技术的一示例性实施例中,所述车辆电动座椅调节方法,还包括:
32、获取电动座椅的第二向左运行状态,第二向左运行状态包括第三向左运动状态和在第六自适应区域的第四向左运行状态,所述第六自适应区域为以第三硬止点为第三起始点,沿向左运动方向距离所述第三起始点第六预设距离阈值形成的区域,所述第三向左运动状态包括超过第三硬止点继续向左运动,第四向左运行状态包括堵转;
33、若所述第三向左运动状态为超过第三硬止点继续向左运动,且所述第四向左运行状态为堵转,按照预设第六标定值对所述左右轴当前所在位置进行更新,所述预设第六标定值小于0;
34、根据更新后的左右轴当前所在位置及所述左右轴实时总行程,更新左右轴实时总行程;
35、控制所述电动座椅以更新后的左右轴实时总行程为限,对所述电动座椅向左运动位置进行调节。
36、在本技术的一示例性实施例中,所述左右轴还设置有用于限定向右运动行程的第四软止点和第四硬止点,所述车辆电动座椅调节方法还包括:
37、控制所述电动座椅向右运动;
38、获取电动座椅在第七自适应区域的第一向右运行状态,所述第七自适应区域为以第四软止点为中心点,以第七预设距离阈值为间距形成的区域,所述第一向右运行状态包括堵转;
39、若所述第一向右运行状态为堵转,按照预设第七标定值对所述左右轴当前所在位置进行更新,所述预设第七标定值大于0;
40、根据更新后的左右轴当前所在位置及所述左右轴实时总行程,更新左右轴实时总行程;
41、控制所述电动座椅以更新后的左右轴实时总行程为限,对所述电动座椅向右运动位置进行调节。
42、在本技术的一示例性实施例中,所述车辆电动座椅调节方法还包括:
43、获取电动座椅的第二向右运行状态,第二向右运行状态包括第三向右运动状态和在第八自适应区域的第四向右运行状态,所述第八自适应区域为以第四硬止点为第四起始点,沿向右运动方向距离所述第四起始点第八预设距离阈值形成的区域,所述第三向右运动状态包括超过第四硬止点继续向右运动,所述第四向后运行状态包括堵转;
44、若所述第三向右运动状态为超过第四硬止点继续向右运动,且所述第四向右运行状态为堵转,按照预设第八标定值对所述左右轴当前所在右位置进行更新,所述预设第八标定值小于0;
45、根据更新后的左右轴当前所在位置及所述左右轴实时总行程,更新左右轴实时总行程;
46、控制所述电动座椅以更新后的左右轴实时总行程为限,对所述电动座椅向右运动位置进行调节。
47、第二个方面,本技术提供一种车辆电动座椅调节系统,所述车辆设置有电动座椅,所述电动座椅设置有前后轴,所述前后轴设置有用于限定向前运动行程的第一软止点和第一硬止点,所述车辆电动座椅调节系统包括:
48、第一控制模块,用于控制电动座椅向前运动;
49、原子服务层,用于控制电动座椅向前运动;
50、增强服务层,用于获取电动座椅在第一自适应区域的第一向前运行状态、前后轴实时总行程以及前后轴当前所在位置,所述第一自适应区域为以第一软止点为中心点,以第一预设距离阈值为间距形成的区域,所述第一向前运行状态包括堵转;若所述第一向前运行状态为堵转,还用于按照预设第一标定值对所述前后轴当前所在位置进行更新,所述预设第一标定值大于0;并用于根据更新后的前后轴当前所在位置及所述前后轴实时总行程,更新前后轴实时总行程;
51、原子服务层还用于控制所述电动座椅以更新后的前后轴实时总行程为限,对所述电动座椅向前运动位置进行调节。
52、第三个方面,本技术提供一种电子设备,所述电子设备包括:
53、一个或多个处理器;
54、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如上所述的车辆电动座椅调节方法。
55、第四个方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行如上所述的车辆电动座椅调节方法。
56、本发明的有益效果:
57、本技术在座椅位置调节过程中,电动座椅在软停止位置内到达了硬停止位置,则触发自适应功能,记录当前的位置,并将当前座椅该轴的硬止点位置更新,其中硬停止位置为座椅轴的机械停止(极限)位置;软停止位置为轴的合理停止位置(通过标定得到),软停止位置减少滑轨机械磨损。
58、本技术通过获取电动座椅在第一自适应区域的第一向前运行状态、前后轴实时总行程以及前后轴当前所在位置,若第一向前运行状态为堵转,按照预设第一标定值对前后轴当前所在位置进行更新,根据更新后的前后轴当前所在位置及前后轴实时总行程,更新前后轴实时总行程,控制电动座椅以更新后的前后轴实时总行程为限,对电动座椅向前运动位置进行调节,进而减少了滑轨机械磨损,实现了对电动座椅位置调节的精确控制。
59、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!