一种匝道处驾驶行为短时预测方法、系统及可存储介质与流程
本发明涉及匝道处驾驶行为预测,更具体的说是涉及一种匝道处驾驶行为短时预测方法、系统及可存储介质。
背景技术:
1、研究表明,驾驶员的不当行为是引起交通事故的主要原因,驾驶行为直接影响道路通行能力和交通安全。因此,研究辨识与预测驾驶行为意图,具有重要的现实意义。
2、驾驶人在匝道内所持有的驾驶意图,与实施驾驶行为之间的映射关系存在着不确定性,譬如驾驶人在某时刻实施的“踩踏脚刹踏板”动作,可能是在直行驾驶意图驱使下实施,也可能是在转弯驾驶意图驱使下实施。现有驾驶行为预测方法预测精度低,尤其对于匝道环境下的驾驶行为预测复杂,预测精度较低,不能满足需要,因此如何科学准确地对匝道环境下驾驶人的驾驶行为进行预测,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种匝道处驾驶行为短时预测方法、系统及可存储介质。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种匝道处驾驶行为短时预测方法,包括以下步骤:
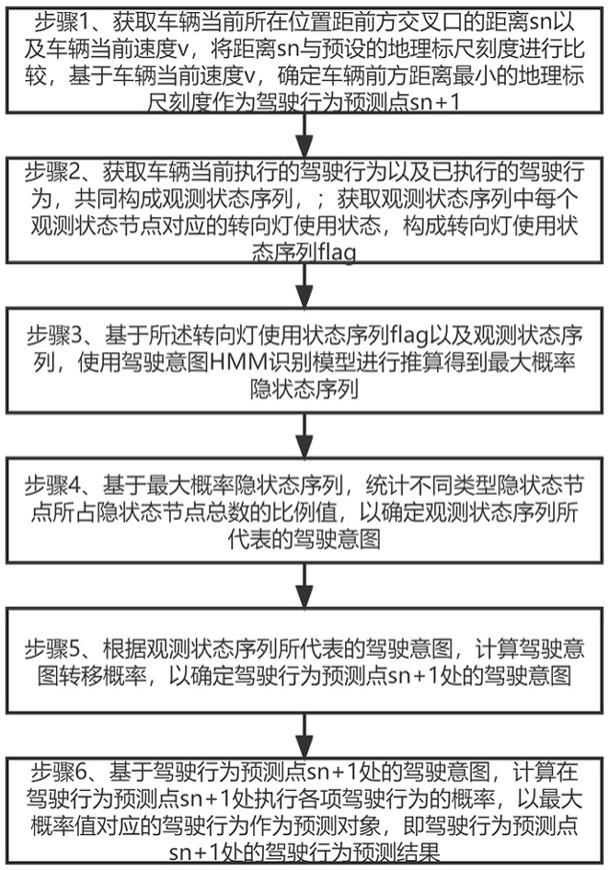
4、步骤1、获取车辆当前所在位置距前方交叉口的距离 s n以及车辆当前速度 v,将距离 s n与预设的地理标尺刻度进行比较,基于车辆当前速度 v,确定车辆前方距离最小的地理标尺刻度作为驾驶行为预测点 s n+1;
5、步骤2、获取车辆当前执行的驾驶行为以及已执行的驾驶行为,共同构成观测状态序列,;获取观测状态序列中每个观测状态节点对应的转向灯使用状态,构成转向灯使用状态序列flag;
6、步骤3、基于所述转向灯使用状态序列flag以及观测状态序列,使用驾驶意图hmm识别模型进行推算得到最大概率隐状态序列;
7、步骤4、基于最大概率隐状态序列,统计不同类型隐状态节点所占隐状态节点总数的比例值,以确定观测状态序列所代表的驾驶意图;
8、步骤5、根据观测状态序列所代表的驾驶意图,计算驾驶意图转移概率,以确定驾驶行为预测点s n+1处的驾驶意图;
9、步骤6、基于驾驶行为预测点 s n+1处的驾驶意图,计算在驾驶行为预测点 s n+1处执行各项驾驶行为的概率,以最大概率值对应的驾驶行为作为预测对象,即驾驶行为预测点 s n+1处的驾驶行为预测结果。
10、可选的,所述驾驶行为包括踩踏脚刹踏板b、踩踏离合器踏板c、踩踏油门踏板d、切换档位e,所述驾驶意图包括直行和转弯,其中转弯包括左转弯和右转弯。
11、可选的,所述步骤3中,推算得到最大概率隐状态序列的方法为:
12、步骤3.1、基于所述转向灯使用状态序列flag,将观测状态序列划分为2个观测状态子序列,即;
13、步骤3.2、对观测状态子序列使用第一驾驶意图hmm识别模型以及viterbi算法进行最大概率隐状态序列推算,得到观测状态子序列对应的最大概率隐状态子序列;对观测状态子序列使用第二驾驶意图hmm识别模型以及viterbi算法进行最大概率隐状态序列推算,得出观测状态子序列对应的最大概率隐状态子序列;所述第一驾驶意图hmm识别模型表示开启转向灯之前的驾驶意图hmm识别模型,所述第二驾驶意图hmm识别模型表示开启转向灯之后的驾驶意图hmm识别模型;
14、步骤3.3、将观测状态子序列对应的最大概率隐状态子序列和观测状态子序列对应的最大概率隐状态子序列进行组合,得到观测状态序列对应的最大概率隐状态序列。
15、可选的,所述驾驶意图hmm识别模型的构建方法为:
16、基于转向灯的开启状态,建立两个隐马尔科夫模型hmm网络模型,分别为对应开启转向灯之前的第一隐马尔科夫模型hmm网络模型和对应开启转向灯之后的第二隐马尔科夫模型hmm网络模型;所述第一隐马尔科夫模型hmm网络模型的隐状态层为开启转向灯之前驾驶人持有的驾驶意图状态和,所述第二隐马尔科夫模型hmm网络模型的隐状态层为转向灯开启后驾驶人持有的驾驶意图状态和;两个隐马尔科夫模型hmm网络模型的观测状态层节点均为驾驶人执行的驾驶行为b、c、d、e;
17、将所述第一隐马尔科夫模型hmm网络模型和第二隐马尔科夫模型hmm网络模型按照车辆地理位置进行展开,展开时以预设的地理标尺刻度为展开点;
18、计算展开后各展开点的驾驶意图转移概率函数,并统计展开后各展开点的驾驶行为意图映射概率,得到最终的第一驾驶意图hmm识别模型和第二驾驶意图hmm识别模型,所述第一驾驶意图hmm识别模型和第二驾驶意图hmm识别模型共同构成驾驶意图hmm识别模型。
19、可选的,以车辆从当前所在位置驶至前方地理标尺刻度处所需时间作为预测时长,以该预测时长为时间间隔,对匝道车辆驾驶行为进行预测。
20、可选的,通过车载gps或地面上埋设的地理信息电子标签获取车辆当前所在位置,通过车载信息采集系统获取车辆当前速度 v、驾驶行为和转向灯使用状态。
21、一种匝道处驾驶行为短时预测系统,包括:
22、驾驶行为预测点确定模块,用于获取车辆当前所在位置距前方交叉口的距离 s n以及车辆当前速度 v,将距离 s n与预设的地理标尺刻度进行比较,基于车辆当前速度 v,确定车辆前方距离最小的地理标尺刻度作为驾驶行为预测点 s n+1;
23、驾驶信息采集模块,用于获取车辆当前执行的驾驶行为以及已执行的驾驶行为,共同构成观测状态序列,;获取观测状态序列中每个观测状态节点对应的转向灯使用状态,构成转向灯使用状态序列flag;
24、最大概率隐状态序列推算模块,用于基于所述转向灯使用状态序列flag以及观测状态序列,使用驾驶意图hmm识别模型进行推算得到最大概率隐状态序列;
25、观测状态序列驾驶意图判断模块,用于基于最大概率隐状态序列,统计不同类型隐状态节点所占隐状态节点总数的比例值,以确定观测状态序列所代表的驾驶意图;
26、预测点驾驶意图判断模块,用于根据观测状态序列所代表的驾驶意图,计算驾驶意图转移概率,以确定驾驶行为预测点 s n+1处的驾驶意图;
27、预测点驾驶行为预测模块,用于基于驾驶行为预测点 s n+1处的驾驶意图,计算在驾驶行为预测点 s n+1处执行各项驾驶行为的概率,以最大概率值对应的驾驶行为作为预测对象,即驾驶行为预测点 s n+1处的驾驶行为预测结果。
28、一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的一种匝道处驾驶行为短时预测方法。
29、经由上述的技术方案可知,本发明公开提供了一种匝道处驾驶行为短时预测方法、系统及可存储介质,与现有技术相比,具有以下有益效果:
30、本发明以转向灯的状态作为分界点,分别构建第一隐马尔科夫模型hmm网络模型和第二隐马尔科夫模型hmm网络模型,并在此基础上按照预设的地理标尺刻度进行展开,得到第一驾驶意图hmm识别模型和第二驾驶意图hmm识别模型,用于对不同的观测状态序列子序列进行推算,综合得到最大概率隐状态序列;基于最大概率隐状态序列,确定观测状态序列所代表的驾驶意图,计算驾驶意图转移概率,以确定驾驶行为预测点处的驾驶意图;进而计算在驾驶行为预测点处执行各项驾驶行为的概率,以最大概率值对应的驾驶行为最终的驾驶行为预测结果。本发明技术方案考虑了行驶道路长度不一、车辆间的相互影响等因素,能够科学、准确地对匝道场景下驾驶人的驾驶行为进行预测。
- 还没有人留言评论。精彩留言会获得点赞!