行驶辅助方法、装置、车辆及存储介质与流程
本技术涉及汽车,特别涉及一种行驶辅助方法、装置、车辆及存储介质。
背景技术:
1、随着生活水平的提高,汽车与人的生活越来越密不可分,在日常行驶中,不可避免的会遇到狭窄道路情况,目前驾驶人员主要采用以下几种方式通过狭窄路段:1、依靠个人的距离感、方向感;但不同的驾驶员的反应能力不同,特别是新手司机对车的宽度和路的宽度感知不强,往往造成车辆通过狭窄路段时发生擦挂事故;2、依靠车外人员的现场指挥;但可能存在周边暂时没有人的情况;3、使用车辆的全景影像进行辅助;但全景影像主要是看实际位置的周边情况,需要用户开进狭窄道路后才会检测到车辆周边的碰撞预警,这样可能会导致用户已深陷困境,车辆进退两难。
2、相关技术中,少数车辆具有示宽灯毯功能,将与车同宽的光毯投射至车头前方,帮助用户在暗环境下查看车宽能否顺利通过狭窄道路,但在白天室外亮环境下,灯光投射在路面上效果显示不明显,因此该功能在白天室外亮环境下作用不大且此功能并不普及,适用范围较小,并且无法准确预判车辆是否能够通过狭窄路段,导致容易陷入进退两难的状况。
技术实现思路
1、本技术提供一种行驶辅助方法、装置、车辆及存储介质,以解决通常在车辆即将通过狭窄路段时进行行驶辅助,一旦车辆无法通过狭窄路段,容易使得车辆陷入进退两难情况,用户体验感较差等问题。
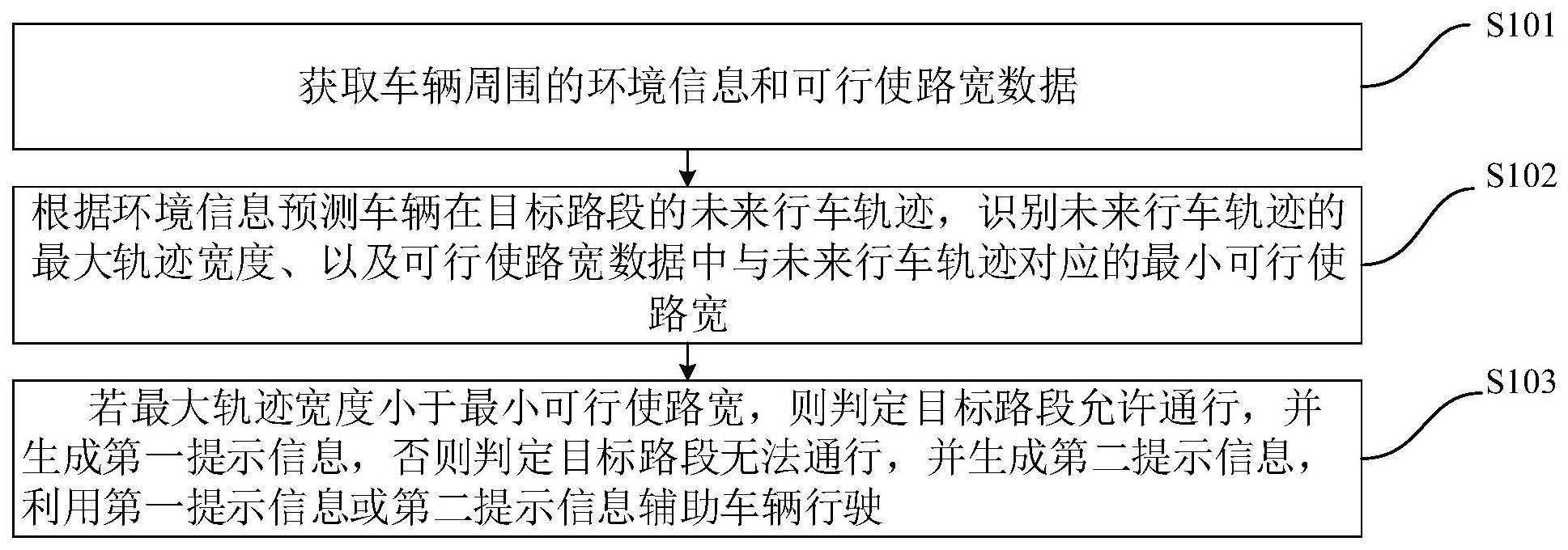
2、本技术第一方面实施例提供一种行驶辅助方法,包括以下步骤:获取车辆周围的环境信息和可行驶路宽数据;根据所述环境信息预测所述车辆在目标路段的未来行车轨迹,识别所述未来行车轨迹的最大轨迹宽度、以及所述可行驶路宽数据中与所述未来行车轨迹对应的最小可行驶路宽;若所述最大轨迹宽度小于所述最小可行驶路宽,则判定所述目标路段允许通行,并生成第一提示信息,否则判定所述目标路段无法通行,并生成第二提示信息,利用所述第一提示信息或所述第二提示信息辅助所述车辆行驶。
3、根据上述技术手段,本技术实施例可以通过环境信息和可行驶路宽数据预测车辆是否可以通过前方路段,并及时通过不同的提示信息提示前方路段的可通行情况,从而可以提前预判车辆是否能够通过狭窄道路或有障碍物的复杂道路,并及时提示用户,使得车辆可以提前避开无法通过的路段,避免车辆陷入进退两难情况,有效提升用户的用车体验,且不受环境亮度影响,适用性和实用性较强。
4、可选地,所述第一提示信息包括所述车辆与可行驶路宽边界的第一碰撞预警距离、第一提示颜色、第一提示语音和第一提示文本中的一种或多种,所述第二提示信息包括所述目标路段中无法通行路段的标注信息、所述车辆距离所述无法通行路段的第二碰撞预警距离、第二提示颜色、第二提示语音和第二提示文本中的一种或多种。
5、根据上述技术手段,本技术实施例第一提示信息主要是提示车辆与可行驶路宽的碰撞距离,通过不同的提示颜色、语音或是文本提示用户车辆可以通过;第二提示信息主要是提示车辆无法通过所需通行路段,并提示车辆距离无法通行路段的碰撞距离,通过不同的提示颜色、语音或是文本提示用户车辆无法通过,以便于及时调整路线,通过不同的提示信息能够及时反应给用户,以便于后续的操作,提升用户的用车体验。
6、可选地,所述利用所述第一提示信息或所述第二提示信息辅助所述车辆行驶,包括:获取所述车辆与可行驶路宽边界的第一实际距离;若所述第一实际距离小于或等于所述第一碰撞预警距离,则根据所述第一实际距离和所述第一碰撞预警距离生成所述车辆的纠偏动作,和/或,生成第三提示信息;控制所述车辆执行纠偏动作,和/或,利用所述第三提示信息辅助所述车辆行驶,以使得所述实际距离大于所述预警距离。
7、根据上述技术手段,本技术实施例通过获取车辆与可行驶路宽边界的实际距离,若其小于或等于碰撞预警距离,则根据实际距离和碰撞预警距离生成车辆的纠偏动作,并生成第三提示信息,利用提示信息辅助车辆执行纠偏动作,避免车辆发生碰撞剐蹭,提升用户的用车体验。
8、可选地,所述第三提示信息包括第三提示颜色、第三提示语音和第三提示文本中的一种或多种。
9、根据上述技术手段,本技术实施例第三提示信息则是车辆根据实际距离和碰撞预警距离所生成的纠偏提示,通过不同的提示颜色、语音或是文本提示用户车辆应该如何偏转才能够安全通过,提高用户的用车体验。
10、可选地,所述利用所述第一提示信息或所述第二提示信息辅助所述车辆行驶,包括:获取所述车辆距离所述无法通行路段的第二实际距离;若所述第二实际距离小于所述第二碰撞预警距离,则控制所述车辆执行停车动作,和/或,生成第四提示信息,利用所述第四提示信息辅助所述车辆行驶。
11、根据上述技术手段,本技术实施例获取车辆距离无法通行路段的实际距离,在其小于碰撞预警距离时,控制车辆执行停车动作,并生成第四提示信息辅助车辆行驶,使得车辆及时调整路线,提高用户使用体验。
12、可选地,所述第四提示信息包括第四提示颜色、第四提示语音和第四提示文本中的一种或多种。
13、根据上述技术手段,本技术实施例第四提示信息是提示车辆无法通过路段,通过不同的提示颜色、语音或是文本提示用户车辆及时停车或调整路线的信息,避免车辆无法通过所通行路段,提高用户的用车体验。
14、可选地,所述利用所述第一提示信息或所述第二提示信息辅助所述车辆行驶,还包括:获取所述车辆的全景影像;将所述第一提示信息或所述第二提示信息显示于所述全景影像。
15、根据上述技术手段,本技术实施例获取车辆的全景影像,将第一提示信息或第二提示信息显示与全景影像上,以便于用户能够及时查看并调整车辆顺利通过所需通行路段,提高用户的用车体验。
16、可选地,所述根据所述环境信息预测所述车辆在目标路段的未来行车轨迹,包括:获取所述车辆的转向信息;根据所述转向信息确定所述车辆的当前行驶方向,根据所述当前行驶方向和所述环境信息生成所述车辆在目标路段的未来行车轨迹。
17、根据上述技术手段,本技术实施例获取车辆的转向信息并确定车辆的当前行驶方向,根据当前行驶方向和环境信息生成车辆在目标路段的未来行车轨迹,提前预判车辆所需行驶路段是否需要通过狭窄道路或障碍物多的复杂道路,提升用户的用车体验。
18、可选地,所述根据所述当前行驶方向和所述环境信息生成所述车辆在目标路段的未来行车轨迹,包括:识别所述环境信息得到所述车辆周围的道路信息和障碍物信息;根据所述当前行驶方向、所述道路信息和障碍物信息生成所述车辆在目标路段的未来行车轨迹。
19、根据上述技术手段,本技术实施例通过识别环境信息得到车辆周围的道路信息和障碍物信息,根据当前行驶方向、道路信息和障碍物信息生成车辆在目标路段的未来行车轨迹,提前预判车辆所需行驶路段是否需要通过狭窄道路或障碍物多的复杂道路,提升用户的用车体验。
20、可选地,所述获取车辆周围的环境信息和可行驶路宽数据,包括:获取所述车辆的当前位置;根据所述当前位置确定信息与数据的采集范围,获取所述采集范围内的环境信息和可行驶路宽数据。
21、根据上述技术手段,本技术实施例获取车辆的当前位置,并根据当前位置确定信息与数据的采集范围,从而获取采集范围内的环境信息和可行驶路宽数据,以便于后续判断车辆是否能够通过该路段。
22、可选地,所述获取所述采集范围内的可行驶路宽数据,包括:获取车辆周围的环境图像和探测数据;识别所述环境图像中的道路环境和障碍物信息,基于所述道路环境和所述障碍物信息对所述环境图像进行语意分割,在分割后图像上标注可通行像素区域和障碍物像素区域,得到标注后的图像;将所述探测数据进行坐标转换,在同一个坐标系下融合所述探测数据和所述标注后的图像得到物体边界点云,并将所述物体边界点云投影至对应路段,根据投影点确定所述对应路段的路宽边界数据。
23、根据上述技术手段,本技术实施例通过获取到的车辆周围的环境图像来识别道路环境和障碍物信息,并基于此对环境图像进行语义分割,并在分割后的图像上标注可通行像素区域和障碍物像素区域,得到标注后图像;将获取到的探测数据进行坐标转换,并在同一坐标系下融合探测数据和标注后图像物体边界点云,将其投影至对应路段,根据投影点可以确定对应路段的路宽边界数据,通过对车辆周围的道路和环境信息进行采集和分析,能够提前预判车辆是否能够通过行驶路段,提升用户的用车体验。
24、可选地,在所述获取车辆周围的环境信息和可行驶路宽数据之前,还包括:识别所述车辆的轨迹碰撞预警功能是否开启;若所述轨迹碰撞预警功能开启,则获取车辆周围的环境信息和可行驶路宽数据,否则不执行所述环境信息和所述可行驶路宽数据的获取动作。
25、根据上述技术手段,本技术实施例在获取车辆周围的相关信息和数据之前,识别车辆的轨迹碰撞预警功能是否开启,若开启则继续获取车辆周围的环境信息和可行驶路宽数据,否则不获取,打开车辆的轨迹碰撞预警功能是否开启,以保证后续出现任何状况都可以及时提醒用户现有状况,提高用户的用车体验。
26、本技术第二方面实施例提供一种行驶辅助装置,包括:获取模块,用于获取车辆周围的环境信息和可行驶路宽数据;识别模块,用于根据所述环境信息预测所述车辆在目标路段的未来行车轨迹,识别所述未来行车轨迹的最大轨迹宽度、以及所述可行驶路宽数据中与所述未来行车轨迹对应的最小可行驶路宽;辅助模块,用于若所述最大轨迹宽度小于所述最小可行驶路宽,则判定所述目标路段允许通行,并生成第一提示信息,否则判定所述目标路段无法通行,并生成第二提示信息,利用所述第一提示信息或所述第二提示信息辅助所述车辆行驶。
27、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的行驶辅助方法。
28、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的行驶辅助方法。
29、由此,本技术至少具有如下有益效果:
30、(1)本技术实施例可以通过环境信息和可行驶路宽数据预测车辆是否可以通过前方路段,并及时通过不同的提示信息提示前方路段的可通行情况,从而可以提前预判车辆是否能够通过狭窄道路或有障碍物的复杂道路,并及时提示用户,使得车辆可以提前避开无法通过的路段,避免车辆陷入进退两难情况,有效提升用户的用车体验,且不受环境亮度影响,适用性和实用性较强。
31、(2)本技术实施例第一提示信息主要是提示车辆与可行驶路宽的碰撞距离,通过不同的提示颜色、语音或是文本提示用户车辆可以通过;第二提示信息主要是提示车辆无法通过所需通行路段,并提示车辆距离无法通行路段的碰撞距离,通过不同的提示颜色、语音或是文本提示用户车辆无法通过,以便于及时调整路线,通过不同的提示信息能够及时反应给用户,以便于后续的操作,提升用户的用车体验。
32、(3)本技术实施例通过获取车辆与可行驶路宽边界的实际距离,若其小于或等于碰撞预警距离,则根据实际距离和碰撞预警距离生成车辆的纠偏动作,并生成第三提示信息,利用提示信息辅助车辆执行纠偏动作,避免车辆发生碰撞剐蹭,提升用户的用车体验。
33、(4)本技术实施例第三提示信息则是车辆根据实际距离和碰撞预警距离所生成的纠偏提示,通过不同的提示颜色、语音或是文本提示用户车辆应该如何偏转才能够安全通过,提高用户的用车体验。
34、(5)本技术实施例获取车辆距离无法通行路段的实际距离,在其小于碰撞预警距离时,控制车辆执行停车动作,并生成第四提示信息辅助车辆行驶,使得车辆及时调整路线,提高用户使用体验。
35、(6)本技术实施例第四提示信息是提示车辆无法通过路段,通过不同的提示颜色、语音或是文本提示用户车辆及时停车或调整路线的信息,避免车辆无法通过所通行路段,提高用户的用车体验。
36、(7)本技术实施例获取车辆的全景影像,将第一提示信息或第二提示信息显示与全景影像上,以便于用户能够及时查看并调整车辆顺利通过所需通行路段,提高用户的用车体验。
37、(8)本技术实施例获取车辆的转向信息并确定车辆的当前行驶方向,根据当前行驶方向和环境信息生成车辆在目标路段的未来行车轨迹,提前预判车辆所需行驶路段是否需要通过狭窄道路或障碍物多的复杂道路,提升用户的用车体验。
38、(9)本技术实施例通过识别环境信息得到车辆周围的道路信息和障碍物信息,根据当前行驶方向、道路信息和障碍物信息生成车辆在目标路段的未来行车轨迹,提前预判车辆所需行驶路段是否需要通过狭窄道路或障碍物多的复杂道路,提升用户的用车体验。
39、(10)本技术实施例获取车辆的当前位置,并根据当前位置确定信息与数据的采集范围,从而获取采集范围内的环境信息和可行驶路宽数据,以便于后续判断车辆是否能够通过该路段。
40、(11)本技术实施例通过获取到的车辆周围的环境图像来识别道路环境和障碍物信息,并基于此对环境图像进行语义分割,并在分割后的图像上标注可通行像素区域和障碍物像素区域,得到标注后图像;将获取到的探测数据进行坐标转换,并在同一坐标系下融合探测数据和标注后图像物体边界点云,将其投影至对应路段,根据投影点可以确定对应路段的路宽边界数据,通过对车辆周围的道路和环境信息进行采集和分析,能够提前预判车辆是否能够通过行驶路段,提升用户的用车体验。
41、(12)本技术实施例在获取车辆周围的相关信息和数据之前,识别车辆的轨迹碰撞预警功能是否开启,若开启则继续获取车辆周围的环境信息和可行驶路宽数据,否则不获取,打开车辆的轨迹碰撞预警功能是否开启,以保证后续出现任何状况都可以及时提醒用户现有状况,提高用户的用车体验。
42、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!