车辆变道指令的生成方法及装置、车辆与流程
本发明涉及一种智能驾驶,特别是涉及一种车辆变道指令的生成方法及装置、车辆。
背景技术:
1、随着智能化驾驶技术的快速发展,对车辆行驶过程的控制越来越精细化。其中,车辆在行驶过程中通常存在车辆变道情况,从而满足不同的行驶规划需求。
2、目前,现有车辆变道指令的生成通常是基于机器学习算法进行智能预测,从而确定产生车辆变道指令后,进行车辆变道的行驶规划。但是,基于机器学习算法确定的车辆变道指令会导致长时间跟慢车行驶,且存在不合理变道的情况,如车辆变道过程中存在碰撞风险等,导致变道产生不稳定性,大大增加了车辆行驶的安全风险,无法满足车辆变道指令的生成稳定性、安全性需求,从而降低了车辆变道指令生成的准确性。
技术实现思路
1、有鉴于此,本发明提供一种车辆变道指令的生成方法及装置、车辆,主要目的在于解决现有车辆变道指令生成的准确性差的问题。
2、依据本发明一个方面,提供了一种车辆变道指令的生成方法,包括:
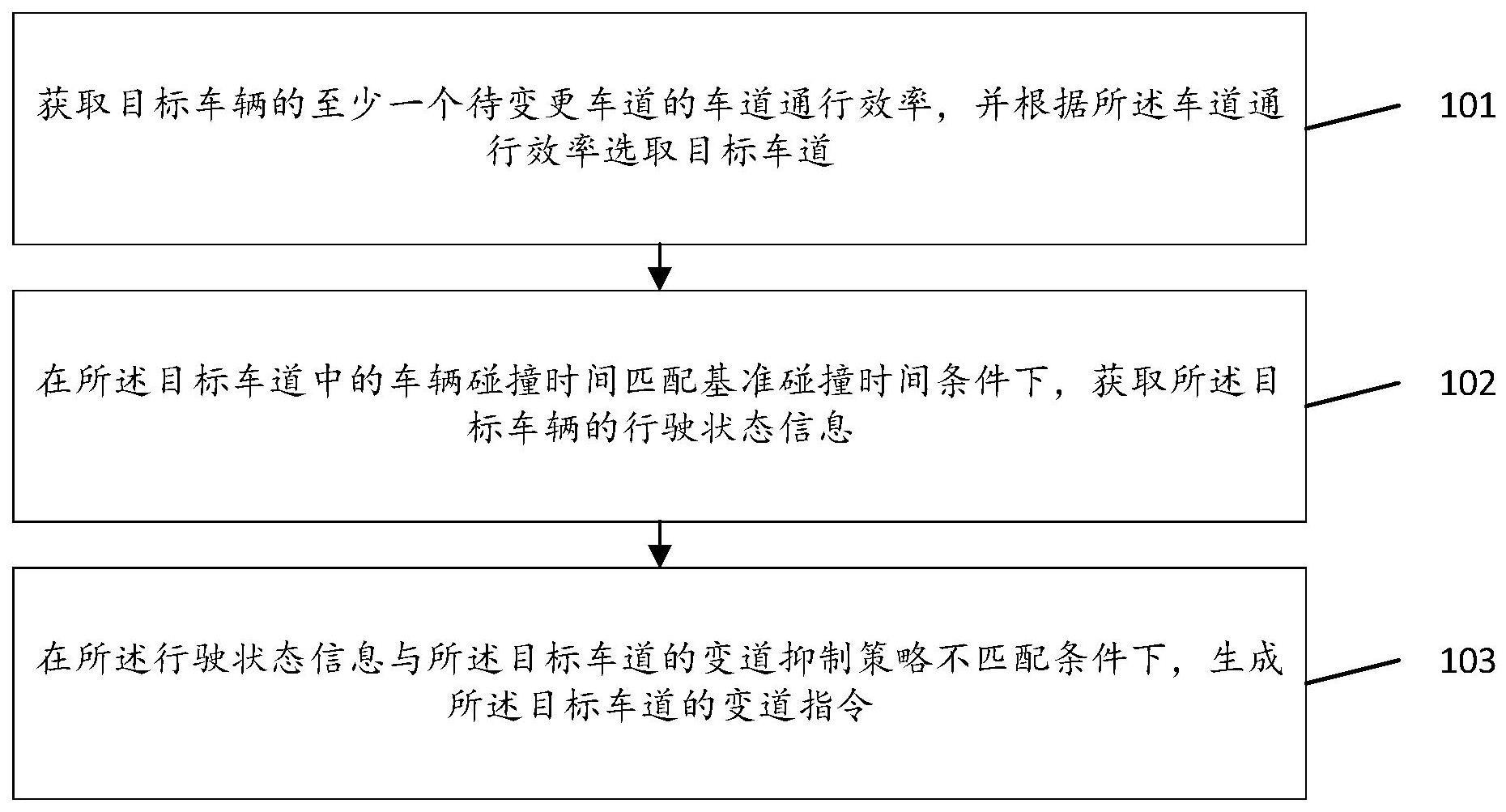
3、获取目标车辆的至少一个待变更车道的车道通行效率,并根据所述车道通行效率选取目标车道,所述车道通行效率用于表征所述目标车辆进入所述待变更车道行驶时的预期通行畅通情况;
4、在所述目标车道中的车辆碰撞时间匹配基准碰撞时间条件下,获取所述目标车辆的行驶状态信息;
5、在所述行驶状态信息与所述目标车道的变道抑制策略不匹配条件下,生成所述目标车道的变道指令,以基于所述变道指令触发车辆变道行驶规划。
6、本发明实施例通过获取目标车辆的至少一个待变更车道的车道通行效率,并根据所述车道通行效率选取目标车道,所述车道通行效率用于表征所述目标车辆进入所述待变更车道行驶时的预期通行畅通情况;在所述目标车道中的车辆碰撞时间匹配基准碰撞时间条件下,获取所述目标车辆的行驶状态信息;在所述行驶状态信息与所述目标车道的变道抑制策略不匹配条件下,生成所述目标车道的变道指令,以基于所述变道指令触发车辆变道行驶规划,实现基于车道通行效率的筛选方式选取待变更的车道,大大减少了不合理变道情况的发生,增加车辆变道的稳定性,确保车辆自动行驶过程中变道的安全性,满足车道变道指令生成的稳定性、安全性需求,从而提高了车辆变道指令生成的准确性。
7、进一步地,所述获取目标车辆的至少一个待变更车道的车道通行效率包括:
8、在第一预设距离范围内确定与所述目标车辆对应的所述待变更车道中的至少一个前位障碍物,并基于前位障碍物速度确定所述前位障碍物的单体通行效率代价,所述单体通行效率代价用于表征所述前位障碍物预期阻塞所述目标车辆的情况;
9、基于所述单体通行效率代价选取所述前位障碍物所处所述待变更车道的车道通行效率。
10、进一步地,所述基于前位障碍物速度确定所述前位障碍物的单体通行效率代价包括:
11、确定所述前位障碍物速度与预设速度的速度差值,并基于所述速度差值、障碍物影响权重值、单位速度差代价参数计算所述前位障碍物的单体通行效率代价,所述障碍物影响权重值为基于稳态跟车因子进行配置。
12、进一步地,所述基于所述单体通行效率代价选取所述前位障碍物所处所述待变更车道的车道通行效率之后,所述方法还包括:
13、按照预设滤波时间间隔对所述车道通行效率进行滤波;
14、所述根据所述车道通行效率选取目标车道包括:
15、将滤波后的所述车道通行效率中最大值所对应的车道确定为目标车道;或,
16、在基于滤波后的所述车道通行效率与所述目标车辆所处自车车道的效率分差匹配预设分差阈值条件下,将匹配所述预设分差阈值的所述车道通行效率的车道确定为目标车道。
17、进一步地,所述获取所述目标车辆的行驶状态信息之前,所述方法还包括:
18、在第二预设距离范围内确定与所述目标车辆在目标车道中的至少一个后位障碍物,并基于预设跟车距离、车辆行驶速度、后位障碍物速度确定所述后位障碍物的车辆碰撞时间,以基于所述车辆碰撞时间与所述基准碰撞时间进行比较;
19、其中,所述基准碰撞时间为基于所述稳态跟车因子、预设跟车距离确定的。
20、进一步地,所述生成所述目标车道的变道指令之前,所述方法还包括:
21、解析所述变道抑制策略中的抑制目标,所述抑制目标用于表征阻塞所述目标车辆进行变道行驶的对象,所述变道抑制策略包括至少一个阻塞所述目标车辆进行变道的子规则;
22、获取所述行驶状态信息中与所述抑制目标对应的行驶参数,并基于所述行驶参数与所述变道抑制策略进行匹配,以确定是否生成所述目标车道的变道指令。
23、进一步地,所述方法还包括:
24、在所述变道指令包括左侧变道指令以及右侧变道指令条件下,则将所述左侧变道指令确定为目标变道指令;或,
25、在所述变道指令为左侧变道指令或右侧变道指令条件下,则将所述左侧变道指令或所述右侧变道指令确定为目标变道指令;
26、基于所述目标变道指令进行车辆变道行驶规划,得到车辆变道规划路径;
27、在基于所述车辆变道行驶规划路径完成所述目标车辆的车辆变道条件下,更新所述目标车辆的待变更车道。
28、进一步地,所述方法还包括:
29、在所述目标车道中的车辆碰撞时间不匹配基准碰撞时间条件,或所述行驶状态信息与所述目标车道的变道抑制策略匹配条件下,确定所述目标车道变道指令生成失败,并在到达预设冷却时间间隔条件下重新执行获取目标车辆的至少一个待变更车道的车道通行效率的步骤;或,
30、在更新所述目标车辆的待变更车道,且到达预设冷却时间间隔条件下,重新执行获取目标车辆的至少一个待变更车道的车道通行效率的步骤。
31、依据本发明另一个方面,提供了一种车辆变道指令的生成装置,包括:
32、第一获取模块,用于获取目标车辆的至少一个待变更车道的车道通行效率,并根据所述车道通行效率选取目标车道,所述车道通行效率用于表征所述目标车辆进入所述待变更车道行驶时的预期通行畅通情况;
33、第二获取模块,用于在所述目标车道中的车辆碰撞时间匹配基准碰撞时间条件下,获取所述目标车辆的行驶状态信息;
34、生成模块,用于在所述行驶状态信息与所述目标车道的变道抑制策略不匹配条件下,生成所述目标车道的变道指令,以使基于所述变道指令触发车辆变道行驶规划。
35、进一步地,所述第一获取模块包括:
36、确定单元,用于在第一预设距离范围内确定与所述目标车辆对应的所述待变更车道中的至少一个前位障碍物,并基于前位障碍物速度确定所述前位障碍物的单体通行效率代价,所述单体通行效率代价用于表征所述前位障碍物预期阻塞所述目标车辆的情况;
37、选取单元,用于基于所述单体通行效率代价选取所述前位障碍物所处所述待变更车道的车道通行效率。
38、进一步地,所述确定单元,具体用于确定所述前位障碍物速度与预设速度的速度差值,并基于所述速度差值、障碍物影响权重值、单位速度差代价参数计算所述前位障碍物的单体通行效率代价,所述障碍物影响权重值为基于稳态跟车因子进行配置。
39、进一步地,所述第一获取模块还包括:
40、滤波单元,用于按照预设滤波时间间隔对所述车道通行效率进行滤波;
41、所述选取单元,具体用于将滤波后的所述车道通行效率中最大值所对应的车道确定为目标车道;或,在基于滤波后的所述车道通行效率与所述目标车辆所处自车车道的效率分差匹配预设分差阈值条件下,将匹配所述预设分差阈值的所述车道通行效率的车道确定为目标车道。
42、进一步地,所述装置还包括:
43、确定模块,用于在第二预设距离范围内确定与所述目标车辆在目标车道中的至少一个后位障碍物,并基于预设跟车距离、车辆行驶速度、后位障碍物速度确定所述后位障碍物的车辆碰撞时间,以基于所述车辆碰撞时间与所述基准碰撞时间进行比较;其中,所述基准碰撞时间为基于所述稳态跟车因子、预设跟车距离确定的。
44、进一步地,所述装置还包括:
45、解析模块,用于解析所述变道抑制策略中的抑制目标,所述抑制目标用于表征阻塞所述目标车辆进行变道行驶的对象,所述变道抑制策略包括至少一个阻塞所述目标车辆进行变道的子规则;
46、匹配模块,用于获取所述行驶状态信息中与所述抑制目标对应的行驶参数,并基于所述行驶参数与所述变道抑制策略进行匹配,以确定是否生成所述目标车道的变道指令。
47、进一步地,所述装置还包括:规划模块,更新模块,
48、所述确定模块,还用于在所述变道指令包括左侧变道指令以及右侧变道指令条件下,则将所述左侧变道指令确定为目标变道指令;或,在所述变道指令为左侧变道指令或右侧变道指令条件下,则将所述左侧变道指令或所述右侧变道指令确定为目标变道指令;
49、所述规划模块,用于基于所述目标变道指令进行车辆变道行驶规划,得到车辆变道规划路径;
50、所述更新模块,用于在基于所述车辆变道行驶规划路径完成所述目标车辆的车辆变道条件下,更新所述目标车辆的待变更车道。
51、进一步地,所述确定模块,还用于在所述目标车道中的车辆碰撞时间不匹配基准碰撞时间条件,或所述行驶状态信息与所述目标车道的变道抑制策略匹配条件下,确定所述目标车道变道指令生成失败,并在到达预设冷却时间间隔条件下重新执行获取目标车辆的至少一个待变更车道的车道通行效率的步骤;或,在更新所述目标车辆的待变更车道,且到达预设冷却时间间隔条件下,重新执行获取目标车辆的至少一个待变更车道的车道通行效率的步骤。
52、依据本发明一个方面,提供了一种车辆,包括上述车辆变道指令的生成装置。
53、根据本发明的又一方面,提供了一种可读存储介质,其上存储有程序或指令,所述程序或指令被处理器执行时实现如上述车辆变道指令的生成方法的步骤。
54、根据本发明的再一方面,提供了一种计算机设备,包括:至少一个处理器,所述处理器和存储器耦合,所述存储器存储有在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现如上述的车辆变道指令的生成方法的步骤。
55、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!