车辆、运动管理器以及运动请求修正方法与流程
本公开涉及车辆、运动管理器以及运动请求修正方法。
背景技术:
1、例如,日本特开2020-032894所记载的信息处理装置从多个驾驶辅助应用受理前后方向以及横向的运动控制量。而且,上述信息处理装置基于受理到的运动控制量来进行对于促动器输出的请求的协调(arbitrate)。
2、上述日本特开2020-032894所记载的信息处理装置如上述那样,基于从多个驾驶辅助应用受理到的运动控制量来进行对于促动器输出的请求的协调。然而,在上述日本特开2020-032894中,未考虑车辆的总重量以及车辆的重心的位置因搭载于车辆的货物以及乘员各自的配置以及重量而发生变动。可认为在车辆的总重量以及车辆的重心的位置发生变动的情况下,基于上述请求的车辆的行驶状态会从通常时(上述总重量以及重心与预想相同的情况下)发生变化。因此,期望使基于驾驶辅助应用(系统)的车辆的行驶状态稳定化。
技术实现思路
1、本公开提供能够使基于驾驶辅助系统的车辆的行驶状态稳定化的车辆、运动管理器以及运动请求修正方法。
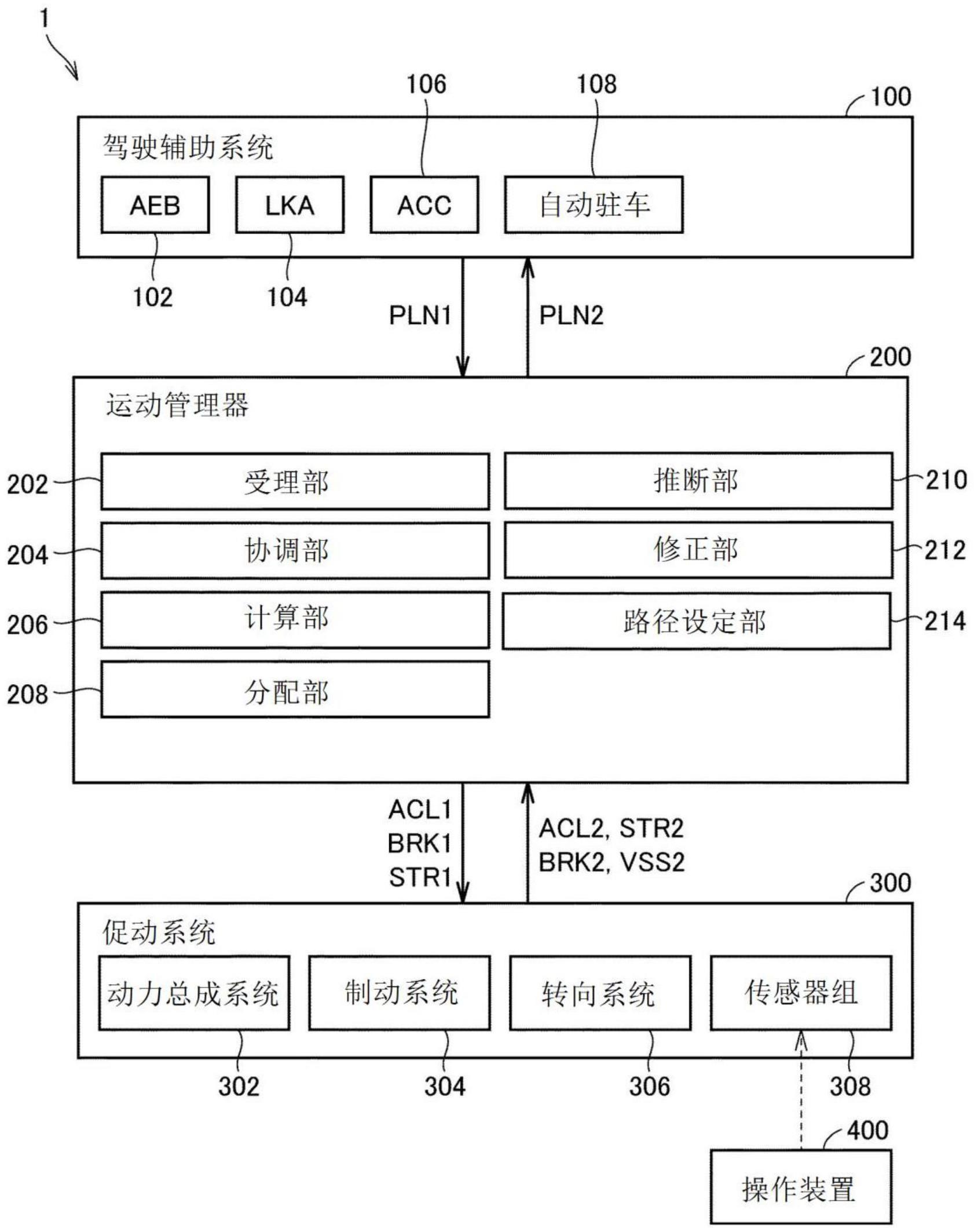
2、本公开的第1方式涉及的车辆具备:驾驶辅助系统,构成为设定与车辆的驾驶辅助相关的行动计划;运动管理器,具备构成为对由驾驶辅助系统设定的多个行动计划进行协调的1个以上的处理器;以及促动系统,被分配使用运动管理器涉及的协调结果而生成的运动请求,运动管理器的1个以上的处理器构成为:推断车辆的总重量以及车辆的重心的位置的至少一方,并且基于推断出的总重量以及重心的位置的至少一方来修正运动请求以便减少因上述总重量以及上述重心的位置对车辆的行驶的影响。
3、在上述第1方式涉及的车辆中,如上述那样,运动管理器推断车辆的总重量以及车辆的重心的位置的至少一方,并且基于推断出的总重量以及重心的位置的至少一方来修正运动请求以便减少因上述总重量以及上述重心的位置对车辆的行驶的影响。由此,在车辆的总重量以及车辆的重心的位置的至少一方发生了变动的情况下,能够通过修正运动请求来抑制对车辆的行驶产生影响。其结果是,能够抑制车辆的总重量以及车辆的重心的位置发生了变动的情况下的车辆的行驶状态从通常时的车辆的行驶状态发生变化。由此,能够使基于驾驶辅助系统的车辆的行驶状态稳定化。
4、在上述第1方式中,运动管理器的1个以上的处理器可以当车辆正在对于车辆的行驶的影响被抑制的地点行驶时推断总重量以及重心的位置的至少一方。若这样构成,则能够抑制总重量以及重心的位置的至少一方的推断因在对行驶的影响比较大的地点行驶过程中例如货物等的配置发生变动而变得不可靠。
5、在上述第1方式中,运动管理器的1个以上的处理器可以以被抑制影响的地点包含于直至目的地为止的行驶路径的方式设定行驶路径。若这样构成,则能够积极地在能够准确地推断总重量以及重心的位置的至少一方的路径行驶。
6、在上述第1方式中,上述车辆可以还具备:车辆主体,形成收纳至少1个货物的货物室;和第1车辆侧通信器,被设置于货物室。第1车辆侧通信器可以与安装于货物的第1货物侧通信器进行通信。运动管理器的1个以上的处理器可以基于第1货物侧通信器与第1车辆侧通信器的通信状态来推断货物室中的货物的配置,并基于推断的货物的配置来推断上述总重量以及上述重心的位置的至少一方。若这样构成,则通过使用第1货物侧通信器以及第1车辆侧通信器,能够容易地推断上述总重量以及上述重心的位置的至少一方。
7、在上述第1方式中,可以在货物室收纳有多个被安装第1货物侧通信器的货物。第1车辆侧通信器可以通过第1货物侧通信器来取得表示为相互相邻的货物的第1货物侧通信器彼此正在通信的信息。若这样构成,则能够基于相互相邻的货物的第1货物侧通信器彼此正在通信来容易地取得相互相邻的第1货物侧通信器中的不与第1车辆侧通信器直接通信的第1货物侧通信器的位置信息。
8、在上述第1方式中,上述车辆可以还具备第2车辆侧通信器,该第2车辆侧通信器构成为与安装于货物的第2货物侧通信器进行通信。第2车辆侧通信器可以通过第2货物侧通信器来取得表示被安装第2货物侧通信器的货物的重量的信息。运动管理器的1个以上的处理器基于推断的货物的配置和所取得的表示货物的重量的信息来推断上述总重量以及上述重心的位置的至少一方。若这样构成,则能够基于由第2车辆侧通信器取得的表示货物的重量的信息来更容易地推断车辆的总重量以及车辆的重心的位置的至少一方。
9、在上述第1方式中,上述车辆可以具备:车辆主体,形成有收纳货物的货物室;和照相机,被设置于货物室。照相机可以读取货物的位置信息和被安装于货物的表示货物的重量信息的编码。运动管理器的1个以上的处理器可以基于照相机取得的货物的位置信息和照相机从编码取得的重量信息来推断上述总重量以及上述重心的位置的至少一方。若这样构成,则能够通过照相机来取得货物的位置信息以及货物的重量信息双方。其结果是,能够容易地抑制部件个数增加。
10、在上述第1方式中,上述车辆可以具备:车辆主体,形成有收纳货物的货物室;和第1重量传感器,被设置于货物室。第1重量传感器可以对收纳于货物室的货物的重量进行检测。运动管理器的1个以上的处理器可以基于由第1重量传感器检测的货物的重量来推断上述总重量以及上述重心的位置的至少一方。若这样构成,则能够通过第1重量传感器取得货物的重量信息而不将表示货物的重量的编码等安装于货物。其结果是,由于不需要将表示货物的重量的编码等安装于货物,所以能够减少用户的麻烦。
11、在上述第1方式中,上述车辆可以还具备:座椅;和第2重量传感器,被设置于座椅。运动管理器的1个以上的处理器可以基于由第2重量传感器检测出的重量来推断总重量以及重心的位置的至少一方。若这样构成,则能够考虑施加于座椅的重量来推断上述总重量以及上述重心的位置的至少一方。其结果是,能够还考虑坐在座椅的乘员、载置于座椅的货物的重量来推断上述总重量以及上述重心的位置的至少一方。由此,能够更准确地推断上述总重量以及上述重心的位置的至少一方。
12、在上述第1方式中,运动管理器可以判定车辆的重心的位置相对于车辆的中心是否偏移了,并且在判定为上述重心的位置相对于中心偏移了的情况下将用于减小因上述重心的位置偏移而引起的惯性力矩的修正值与运动请求相加。若这样构成,则能够抑制车辆的行驶状态由于因车辆的重心的偏移而引起的惯性力矩会变得不稳定。
13、在上述第1方式中,运动管理器的1个以上的处理器可以判定车辆的重心的位置相对于车辆的中心是否至少在前后方向偏移了,并且在判定为上述重心的位置相对于中心向前方或者后方的一方偏移了的情况下修正运动请求,以便与上述重心的位置位于中心的情况相比施加于车辆的前方或者后方的一方的车轮的制动力增加。这里,在车辆的重心位于车辆的前方以及后方的一方的情况下,车辆的前方以及后方的另一方的车轮容易被锁定。因此,能够抑制车辆的行驶状态因在前轮以及后轮的一方被锁定的状态下前轮以及后轮的另一方的驱动力变大而变异常。
14、在上述第1方式中,上述车辆可以还具备构成为对车辆的角加速度进行检测的角加速度传感器。运动管理器的1个以上的处理器可以基于由角加速度传感器检测的角加速度来修正运动请求。若这样构成,则能够基于由角加速度传感器检测出的角加速度来更适当地修正运动请求。
15、本公开的第2方式涉及的运动管理器包括1个以上的处理器。1个以上的处理器对由车辆的驾驶辅助系统设定的与车辆的驾驶辅助相关的多个行动计划进行协调,基于协调结果来计算运动请求,将运动请求分配给车辆的促动系统,推断车辆的总重量以及车辆的重心的位置的至少一方,基于推断出的总重量以及重心的位置的至少一方来修正运动请求以便减少因上述总重量以及上述重心的位置对车辆的行驶的影响。
16、上述第2方式涉及的运动管理器如上述那样推断车辆的总重量以及车辆的重心的位置的至少一方,并且基于推断出的总重量以及重心的位置的至少一方来修正运动请求以便减少因上述总重量以及上述重心的位置对车辆的行驶的影响。由此,在车辆的总重量以及车辆的重心的位置的至少一方发生了变动的情况下,能够通过修正运动请求来抑制对车辆的行驶产生影响。其结果是,能够抑制车辆的总重量以及车辆的重心的位置发生了变动的情况下的车辆的行驶状态从通常时的车辆的行驶状态发生变化。由此,能够提供能够使基于驾驶辅助系统的车辆的行驶状态稳定化的运动管理器。
17、本公开的第3方式涉及的运动请求修正方法具备:对由车辆的驾驶辅助系统设定的与车辆的驾驶辅助相关的多个行动计划进行协调;基于协调结果来计算分配给车辆的促动系统的运动请求;推断车辆的总重量以及车辆的重心的位置的至少一方;基于推断出的总重量以及重心的位置的至少一方来修正所计算的运动请求,以便减少因上述总重量以及上述重心的位置对车辆的行驶的影响;以及将被修正的运动请求分配给促动系统。
18、在上述第3方式涉及的运动请求修正方法中,如上述那样,基于推断出的总重量以及重心的位置的至少一方来修正运动请求以便减少因上述总重量以及上述重心的位置对车辆的行驶的影响。由此,在车辆的总重量以及车辆的重心的位置的至少一方发生了变动的情况下,能够通过修正运动请求来抑制对车辆的行驶产生影响。其结果是,能够抑制车辆的总重量以及车辆的重心的位置发生了变动的情况下的车辆的行驶状态从通常时的车辆的行驶状态发生变化。由此,能够提供可使基于驾驶辅助系统的车辆的行驶状态稳定化的运动请求修正方法。
19、根据本公开的各方式,能够使基于驾驶辅助系统的车辆的行驶状态稳定化。
- 还没有人留言评论。精彩留言会获得点赞!