用于车辆的控制转变的方法及装置与流程
本公开涉及一种用于将车辆的控制从自主驾驶系统转变到人类驾驶员的方法。此外,本公开针对一种包括用于执行上述方法的部件的数据处理装置。而且,本公开涉及一种用于将车辆的控制从自主驾驶系统转变到人类驾驶员的系统。此外,本公开针对对应的计算机程序和对应的计算机可读存储介质。
背景技术:
1、提供自主驾驶功能的车辆是已知的。在此类车辆中,诸如车辆的纵向引导和侧向引导之类的任务可以由自主驾驶系统执行,即,无需人类驾驶员的交互。换句话说,自主驾驶系统负责车辆的转向、加速和制动。
2、一些具有自主驾驶功能的车辆要求人类驾驶员根据自主驾驶系统的请求迅速接管车辆的控制。根据汽车工程师协会(sae)定义的第3级提供自主驾驶功能的车辆可以是这种情况。在说明性示例中,车辆接近建筑区域并且自主驾驶系统检测到它将不能进一步引导车辆,例如,由于没有道路标记。因此,请求人类驾驶员接管对车辆的控制。
3、显然,为了所有交通参与者的安全,控制从自主驾驶系统到人类驾驶员的转变需要以平稳和冷静的方式进行。
技术实现思路
1、本公开的目的是进一步改进用于将车辆的控制从自主驾驶系统转变到人类驾驶员的已知方法和系统。
2、本公开的独立权利要求的主题至少部分地解决或减轻了该问题,其中进一步的示例被并入从属权利要求中。
3、根据第一方面,提供了一种用于将车辆的控制从自主驾驶系统转变到人类驾驶员的方法,包括:
4、-从自主驾驶系统接收接管请求,
5、-确定单体切换部件是否被致动,以及
6、-仅在确定单体切换部件被致动的条件下才触发自主驾驶系统的停用。
7、在这种上下文中,接管请求应被理解为由自主驾驶系统递送的消息或信号。该消息或信号携带人类驾驶员接管车辆的控制所需的信息。
8、在本公开中,自主驾驶系统是被配置为执行车辆的纵向引导和侧向引导的系统。换句话说,自主驾驶系统被配置为在没有人类驾驶员的交互的情况下驾驶车辆、加速车辆和减速车辆。侧向引导的另一个术语是横向引导。
9、单体切换部件应理解为恰好一个切换部件。这个切换部件可以在两个状态(即,第一状态和第二状态)之间切换,其中第一状态和第二状态中的一个是致动状态并且相应的另一个状态是非致动状态。这些状态彼此不同。这些状态既不重叠,也不可能从一个状态平滑或逐渐转变到相应的另一个状态。切换部件被配置为由人类驾驶员有意地致动。因此,切换部件不同于一般独立于人类驾驶员的意图而操作的任何种类的传感器或检测器。尤其是,在本公开的意义上,手持式检测器将被视为传感器而不是切换部件。
10、触发自主驾驶系统的停用可以改述为终止自主驾驶模式并开始手动或人类驾驶模式。
11、因此,致动单体切换部件可以被视为确认人类驾驶员接管了对车辆的控制。
12、必须致动单体切换部件作为触发自主驾驶系统停用的唯一条件的事实具有以下优点,即,可以由人类驾驶员的单手执行切换部件的致动。在几乎所有自主驾驶情况下,人类驾驶员都更容易确认控制权的接管并且至少在最初用单手而不是两只手来执行控制。如果想象一下,在自主驾驶系统控制车辆的情况下,人类驾驶员可能会做其它事情,例如吃、喝、阅读、玩游戏、看视频、工作,这就变得清楚了。因此,人类驾驶员可以一只手或两只手都拿着方向盘以外的东西,例如,书、食物、饮料、电子设备。因此,在能够接管车辆的控制之前,人类驾驶员将需要至少解放他或她的一只手。在自主驾驶系统控制车辆的同时,如果人类驾驶员执行需要他或她的双手的活动,这些优势尤其清楚。因此,使用根据本公开的方法,人类驾驶员能够以执行所谓的“一手接管”和“单手接管”的快速且简单的方式接管车辆的控制。因此,接管以平静和宁静的方式进行。这保持人类驾驶员的低压力水平,并且因此增强人类驾驶员和其他交通参与者的驾驶安全性。由于降低的压力水平,与双手接管过程相比,有可能一手接管甚至提高驾驶安全性。
13、根据示例,如果确定单体切换部件在定义的时间段内被致动,那么可以触发自主驾驶系统的停用。这个定义的时间段在接收到接管请求时开始。因此,为了由人类驾驶员接管控制,需要在定义的时间段内致动单体切换部件。定义的时间段也可以被指定为时间窗口。定义的时间段可以是5到15秒,尤其是8到12秒。在示例中,定义的时间段是10秒。因此,人类驾驶员需要相对快地接管控制。这确保在自主驾驶系统进入无法再控制车辆的情况之前,人类驾驶员接管了车辆的控制权。因此,增强了驾驶安全性。
14、根据示例,该方法可以包括如果在定义的时间段内没有确定单体切换部件被致动,那么触发低风险操纵。低风险操纵也可以被指定为最小风险操纵。这意味着用于停止车辆的自主过程被触发。换句话说,如果人类驾驶员无法在定义的时间段或时间窗口内接管控制,那么车辆将进入安全状态。
15、在示例中,如果单体切换部件被确定为被致动达定义的时间,那么可以触发自主驾驶系统的停用。定义的时间可以是0.5到2秒,尤其是0.8到1.2秒。在示例中,时间段是1秒。使用这种定义的时间具有这样的效果,即,车辆的自主控制仅在人类驾驶员有意致动单体切换部件的情况下才被触发以终止。在人类驾驶员无意中致动单体切换部件的时间短于定义时间的情况下,自主驾驶系统继续控制车辆。
16、根据示例,该方法还可以包括触发对人类驾驶员的通知。因此,人类驾驶员被告知他或她被请求接管车辆的控制。该通知可以是听觉的、视觉的和触觉的中的至少一种。因此,人类驾驶员能够快速响应接管请求。
17、在示例中,该方法还可以包括请求方向盘移动到致动位置。可替代地或附加地,驾驶员座椅被请求移动到直立位置。如果车辆由自主驾驶系统控制时方向盘处于缩回(retracted)或收起(stowed)位置,那么这种情况适用。因此,当车辆由自主驾驶系统控制时,人类驾驶员有更多的空间来执行除使车辆转向以外的活动。在致动位置,方向盘处于可以被人类驾驶员舒适地抓握的位置。通常,方向盘在处于致动位置时比在处于缩回或收起位置时更靠近人类驾驶员。就驾驶员座椅而言,当车辆由自主驾驶系统控制时,其靠背可以处于舒适位置。驾驶员因此可以采取放松的就座姿势。通过请求方向盘移动到致动位置和/或通过请求驾驶员座椅移动到直立位置,促进抓住方向盘并接管控制。
18、注意的是,在本公开中,术语方向盘应被理解为包括被配置用于使车辆转向的任何部件。不必将这个部件成形为轮盘。因此,术语方向盘也指定转向轭或所谓的矩形方向盘。
19、根据本公开的方法可以至少部分地由计算机实现,并且可以以软件或硬件、或软件和硬件来实现。另外,该方法可以通过在提供数据处理功能的部件上运行的计算机程序指令来执行。数据处理部件可以是合适的计算部件,诸如电子控制模块等,其也可以是分布式计算机系统。数据处理部件或计算机分别可以包括处理器、存储器、数据接口等中的一个或多个。
20、根据第二方面,提供了一种数据处理装置,包括用于执行根据本公开的方法的部件。因此,处理装置促进将车辆的控制从自主驾驶系统转变到人类驾驶员。转变对于人类驾驶员来说尤其简单,使得其可以快速执行。这增强了人类驾驶员和其他交通参与者的驾驶安全性。
21、注意的是,数据处理装置被解释为与自主驾驶系统分离的实体。这样做是为了便于解释。当然,数据处理装置也可以被形成为自主驾驶系统的一部分。在这种情况下,数据处理装置形成自主驾驶系统的第一子单元,其中如上面所解释的自主驾驶系统的功能(转向、加速、减速)由自主驾驶系统的第二子单元执行。因此,上述数据处理装置与自主驾驶系统之间的交互被实现为自主驾驶系统的第一子单元与自主驾驶系统的第二子单元的交互。
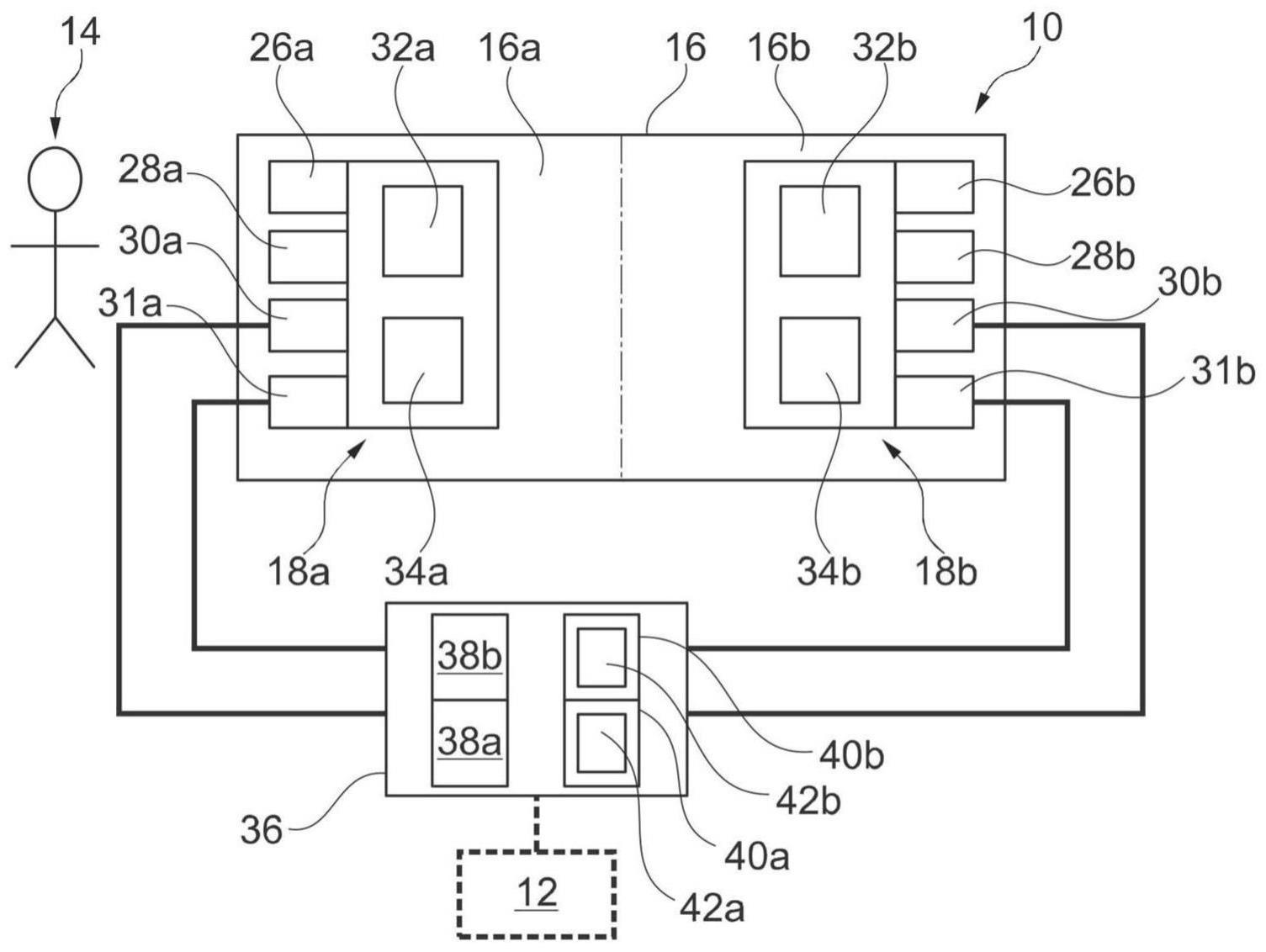
22、根据第三方面,提供了一种用于将车辆的控制从自主驾驶系统转变到人类驾驶员的系统。该系统包括方向盘、根据本公开的第二方面的数据处理装置,以及第一单体切换部件。第一单体切换部件位于方向盘上定义的位置,使得第一单体切换部件可以由人类单只手致动。而且,第一单体切换部件通信耦合到数据处理装置,使得数据处理装置可以确定第一单体切换部件是否被致动。因此,人类驾驶员可以用单手从自主驾驶系统接管车辆的控制。在几乎所有自主驾驶情况下,这对人类驾驶员来说都是容易的,因为在自主驾驶系统控制车辆的情况下,人类驾驶员可能忙于做其它事情,例如,吃、喝、阅读、玩游戏、看视频、工作,而不是等待使车辆转向的请求。因此,使用根据本公开的方法,人类驾驶员能够以执行所谓的“一手接管”和“单手接管”的快速且简单的方式接管车辆的控制。因此,接管以平静和宁静的方式发生。这保持人类驾驶员的低压力水平,因此增强了人类驾驶员和其他交通参与者的驾驶安全性。而且,由于一手接管,还可以减轻其它危险事件,如无意中掉落物体或将热饮洒在车内。
23、在示例中,该系统还可以包括位于方向盘上定义的位置的第二单体切换部件,使得第二单体切换部件可以由人类单只手致动,其中第二单体切换部件通信耦合到数据处理装置,使得数据处理装置可以确定第二单体切换部件是否被致动。在这种配置中,人类驾驶员可以通过致动第一单体切换部件或第二单体切换部件来确认对车辆的控制的接管。因此,对于人类驾驶员来说进一步促进接管控制,因为人类驾驶员可以使用更容易够到的单体切换部件。这可以取决于人类驾驶员是否在他或她的左手、右手或双手中拿着物体,例如,书、食物、饮料、电子设备。如果人类驾驶员有一只空闲的手,那么可以方便地使用空闲的手来确认控制的接管并且至少最初用这只手执行车辆的控制。在人类驾驶员双手握住物体的情况下,这些物体中的一个可能比另一个更容易收起。因此,人类驾驶员可以收起更容易收起的物体并接管控制,而不太容易收起的物体至少暂时留在人类驾驶员的一只手中。因此,在这些情况下同样促进接管控制。这导致增强的驾驶安全性。
24、在示例中,第一单体切换部件和第二单体切换部件可以彼此冗余。这意味着第一单体切换部件和第二单体切换部件具有完全相同的功能,因此,人类驾驶员是使用第一单体切换部件还是第二单体切换部件接管控制并不重要。因此,人类驾驶员可以使用在请求接管的情况下显得最方便的切换部件。
25、在示例中,在方向盘的标准位置,第一单体切换部件可以布置在方向盘的左半部并且第二单体切换部件可以布置在方向盘的右半部,反之亦然。在这种上下文中,方向盘的标准位置被定义为方向盘的位置,其与直线向前定向的车辆的车轮对应,使得车辆将直线向前行驶。在这种配置中,单体切换部件中的一个是人类驾驶员的左手容易够到的,而另一个是人类驾驶员的右手容易够到的。如果方向盘已转出其标准位置,那么这种情况也适用。因此,人类驾驶员可以在相对短的时间内非常容易地致动第一单体切换部件和第二单体切换部件中的至少一个。
26、在示例中,第一单体切换部件和第二单体切换部件中的至少一个可以是按压开关或拨片开关。这种切换部件可以以简单的方式由人类驾驶员致动。此外,它们还提供可靠的切换功能。此外,这种切换部件不太容易被无意地致动。总而言之,这种切换部件可以被可靠地致动。
27、在示例中,第一单体切换部件和第二单体切换部件中的至少一个可以包括冗余电源、冗余信号连接和两个冗余信号生成单元中的至少一个。因此,第一单体切换部件和第二单体切换部件中的至少一个是高度可靠的。在示例中,第一单体切换部件和第二单体切换部件都包括冗余电源、冗余信号连接和两个冗余信号生成单元中的至少一个。因此,两个单体切换部件都是高度可靠的。
28、在示例中,第一单体切换部件和第二单体切换部件都满足由iso 26262标准定义的汽车安全完整性级别(asil)风险分类方案的级别d要求。
29、根据第四方面,提供了一种包括指令的计算机程序,当该程序由计算机执行时,使计算机执行根据本公开的方法。计算机可以由如上所述的数据处理装置构成。
30、根据第五方面,提供了一种包括指令的计算机可读存储介质,指令在由计算机执行时使计算机执行根据本公开的方法。同样,计算机可以由如上所述的数据处理装置形成。
31、应当注意的是,以上示例可以彼此组合而不管所涉及的方面。因而,该方法可以与结构特征相结合,同样,装置和系统可以与上面关于方法等描述的特征相结合。
32、本公开的这些和其它方面将参考下文描述的实施例而变得清楚并被阐明。
- 还没有人留言评论。精彩留言会获得点赞!