自动驾驶系统的安全和/或性能监视的制作方法
本发明涉及用于自动驾驶系统(ads)的安全和/或性能监视的方法和系统。
背景技术:
1、在过去几年中,与自动驾驶运载工具相关的研究和开发活动数量激增,并且正在探索多种不同的方法。越来越多的现代运载工具具有高级驾驶者辅助系统(adas),以提高运载工具安全性以及更普遍的道路安全性。adas,例如可以由自适应巡航控制(acc)、碰撞避免系统、前方碰撞提醒等来表示,是可以在驾驶时帮助运载工具驾驶者的电子系统。目前,在与adas和自动驾驶(ad)领域相关的多个技术领域中都存在着持续的研究和开发。adas和ad在本文中将被称为通用术语自动驾驶系统(ads),与例如由sae j3016驾驶自动化级别(0-5)所定义的所有不同的自动化级别相对应,特别是级别4和级别5。
2、在不久的将来,ads解决方案有望应用于大多数投放市场的新车。ads可以被解释为各种部件的复杂组合,可以被定义为由电子器件和机器而非人类驾驶者执行运载工具感知、决策和操作的系统,以及将自动化引入道路交通。这包括对运载工具、目的地的操控,以及对周围环境的感知。虽然自动化系统可以控制运载工具,但它允许人类操作者将所有或至少部分责任留给系统。ads通常结合诸如例如雷达、lidar、声纳、照相机、导航系统(例如gps、里程表和/或惯性测量单元(imu))等各种传感器来感知运载工具的周围环境,在此基础上,高级控制系统可以解释传感信息以识别合适的导航路径以及障碍物、自由空间区域和/或相关标志。
3、然而,上述ads特征必然要求以高度完整性运行,以为运载工具乘员及其周围环境提供足够低的风险。确保风险足够低可能需要用于统计证明的难以处理的数据量,并且根据示例,将需要例如大约一百辆车连续驾驶五百年来获取。在将ads投放到公共道路之前,存在几种方法可以最小化ads特征的风险。然而,除此之外,一般认为,应当在现场对ads特征进行一次监视,以确保它们符合要求的安全级别。此外,由于各种ads特征使用的完整传感器设置可能会生成大量数据,因此将所有这些数据发送到云中进行离线处理和分析可能是有挑战性的,甚至是不可能的。
4、从技术上,可能与监视实体共享运载工具驾驶时感测到的所有数据,但实际情况是,当运载工具驾驶时,每辆运载工具的传感器设置将生成包含大量数据的数据流。如果在运载工具驾驶时车载ads利用的所有感测数据都被发送到远程服务器进行离线处理和分析,则要传输的大量数据可能表示,即使通过非常高的带宽连接,每次数据传输的持续时间也可能是不切实际的。此外,当试图进行数据传输时,高带宽、高质量的连接和数据传输的长持续时间将用尽每个运载工具和/或监视实体上的通信资源以及电力资源。对于诸如监视和管理车队ads的后台服务器等监视实体,其中,车队包括大量运载工具,如果车队中的大量运载工具同时将用于配置它们各自的车载ads的所有数据传送到后台服务器,则可能出现诸如拥塞等的额外的复杂情况。
5、因此,从安全角度和性能(质量)角度来看,本领域需要新的解决方案来确保ads的运行能力。这种保证方法的目标是最小化部署时的残余风险,使其相对于提出的安全和性能要求是可接受的。
技术实现思路
1、因此,本发明的一目的是提供用于自动驾驶系统(ads)的安全和/或性能监视的计算机实施的方法、计算机可读存储介质、对应的处理系统、远程服务器和云环境,其可减轻目前已知系统和方法的所有或至少一些上述缺点。
2、这一目的借助于所附独立权利要求中定义的用于自动驾驶系统(ads)的安全和/或性能监视的计算机实施的方法、计算机可读存储介质、对应的处理系统、远程服务器和云环境来实现。术语“示例性的”在本上下文中被理解为用作实例、示例或说明。
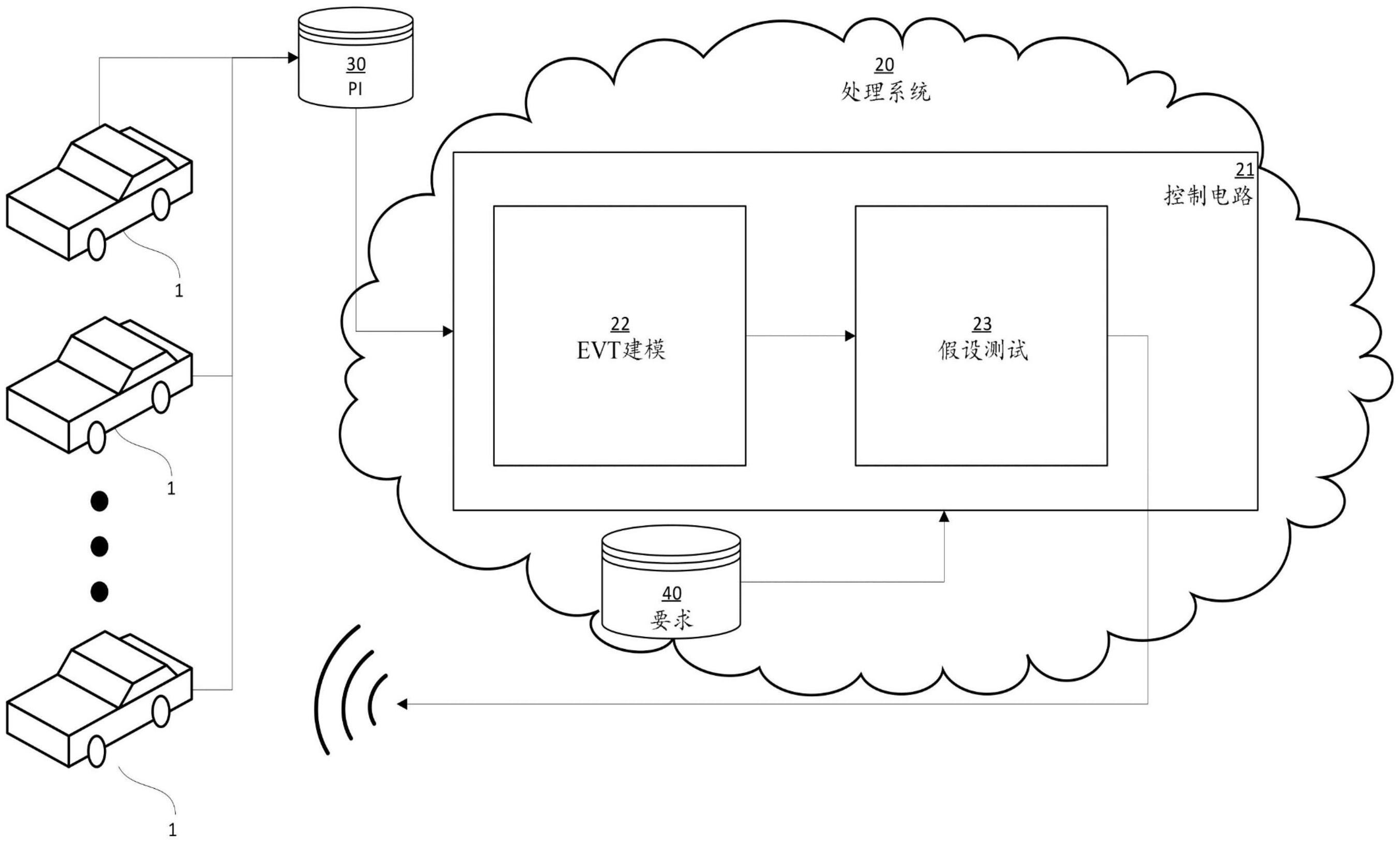
3、根据本发明的第一方面,提供了用于自动驾驶系统(ads)的安全和/或性能监视的计算机实施的方法。方法包括获取由多个配备ads的运载工具中的每一个基于一个或多个驾驶会话生成的多个性能指示符(pi),其中,多个pi是至少一种pi类型的pi,并且其中,每个pi类型指示配备ads的运载工具在一个或多个驾驶会话期间所暴露到的安全关键或质量关键事件。方法进一步包括基于极值理论(evt)模型对所获取的pi的每个pi类型进行建模,其中,每个被建模的pi类型指示超过该pi类型的pi值的概率,并且相对于对应的预定义要求来估计每个被建模的pi类型。然后,如果该估计指示一个或多个被建模的pi类型不符合对应的预定义要求,则方法进一步包括确定ads违反了一个或多个安全或质量要求,并且向ads管理系统传输指示所违反的一个或多个安全或质量要求的第一信号和/或向多个配备ads的运载工具传输第二信号。
4、根据本发明的第二方面,提供了存储一个或多个程序的(非暂时性)计算机可读存储介质,一个或多个程序配置为由处理系统的一个或多个处理器执行,一个或多个程序包括用于执行根据本文公开的任一实施例的方法的指令。对于本发明的这一方面,存在与先前讨论的本发明的第一方面相似的优点和优选特征。
5、本文所使用的术语“非暂时性”旨在描述不包括传播电磁信号的计算机可读存储介质(或“存储器”),但不旨在以其他方式限制词语“计算机可读介质或存储器”所涵盖的物理计算机可读存储装置的类型。例如,术语“非暂时性计算机可读介质”或“有形存储器”旨在涵盖不一定永久存储信息的存储装置类型,包括例如随机存取存储器(ram)。以非暂时形式存储在有形计算机可访问存储介质上的程序指令和数据还可以通过传输介质或信号(例如电气、电磁或数字信号)来传输,这些信号可以经由诸如网络和/或无线链路等通信介质来传送。因此,本文使用的术语“非暂时性的”是对介质本身的限制(即有形的,而不是信号),而不是对数据存储持久性的限制(例如ram还是rom)。
6、根据本发明的第三方面,提供了用于自动驾驶系统(ads)的安全和/或性能监视的处理系统。处理系统包括控制电路,该控制电路被配置为获取由多个配备ads的运载工具中的每一个基于一个或多个驾驶会话生成的多个性能指示符(pi),其中,多个pi是至少一种pi类型的pi,并且其中,每个pi类型指示配备ads的运载工具在一个或多个驾驶会话期间所暴露到的安全关键或质量关键事件。控制电路进一步被配置为基于极值理论(evt)模型对所获取的pi的每个pi类型进行建模,其中,每个被建模的pi类型指示超过该pi类型的pi值的概率,并且相对于对应的预定义要求来估计每个被建模的pi类型。然后,如果该估计指示一个或多个被建模的pi类型不符合对应的预定义要求,则控制电路进一步被配置为,如果该估计指示一个或多个被建模的pi类型不符合对应的预定义要求,则确定ads违反了一个或多个安全或质量要求,并且向ads管理系统传输指示所违反的一个或多个安全或质量要求的第一信号和/或向多个配备ads的运载工具传输第二信号。对于本发明的这一方面,存在与先前讨论的本发明的第一方面相似的优点和优选特征。
7、根据本发明的第四方面,提供了远程服务器,包括根据本文公开的任一实施例的处理系统。
8、根据第五方面,提供了云环境,包括一个或多个根据本文公开的任一实施例的远程服务器。
9、本发明的其他实施例在从属权利要求中定义。应当强调,术语“包括/包含”当在本说明书中使用时,用于指定所陈述的特征、整体、步骤或部件的存在。它不排除一个或多个其他特征、整体、步骤、部件或其组合的存在或添加。
10、本发明的以上和其他的特征和优点将在下文中参考下文所述的实施例进一步阐明。
- 还没有人留言评论。精彩留言会获得点赞!