基于快速收敛SCKF和自适应轮胎刚度的路面附着系数估计方法及介质
本发明涉及路面信息研究领域,具体是基于快速收敛sckf和自适应轮胎刚度的路面附着系数估计方法及介质。
背景技术:
1、路面附着系数作为路面关键信息,影响着很多车辆主动安全系统和高级驾驶辅助系统(adas)的实际作用效果,包括防抱死制动系统(abs)、电子稳定控制(esc)、牵引力控制系统(tcs)、自适应巡航(acc)、自动紧急制动(aeb)等。因此,关于路面附着系数估计的研究对车辆行驶安全和预期功能安全具有重要价值。路面附着系数的估计方法一般可以分为两类:基于实验和基于模型的方法。基于实验的方法是在车辆上加装的特殊传感器,根据特殊传感器参数与路面附着系数之间的对应关系估计路面附着系数。这类方法十分依赖于特殊传感器的可靠性,同时实现成本较高。基于模型的方法是路面附着系数估计的主要方法,利用常见的车载传感器获取与路面附着系数有关的车辆动态响应信号,结合相关模型对路面附着系数进行估计。但是,当在实际使用中当轮胎出现破损而导致垂向弹性刚度发生变化时,现有估计方法的计算结果出现了较大的偏离,收敛于错误值。
技术实现思路
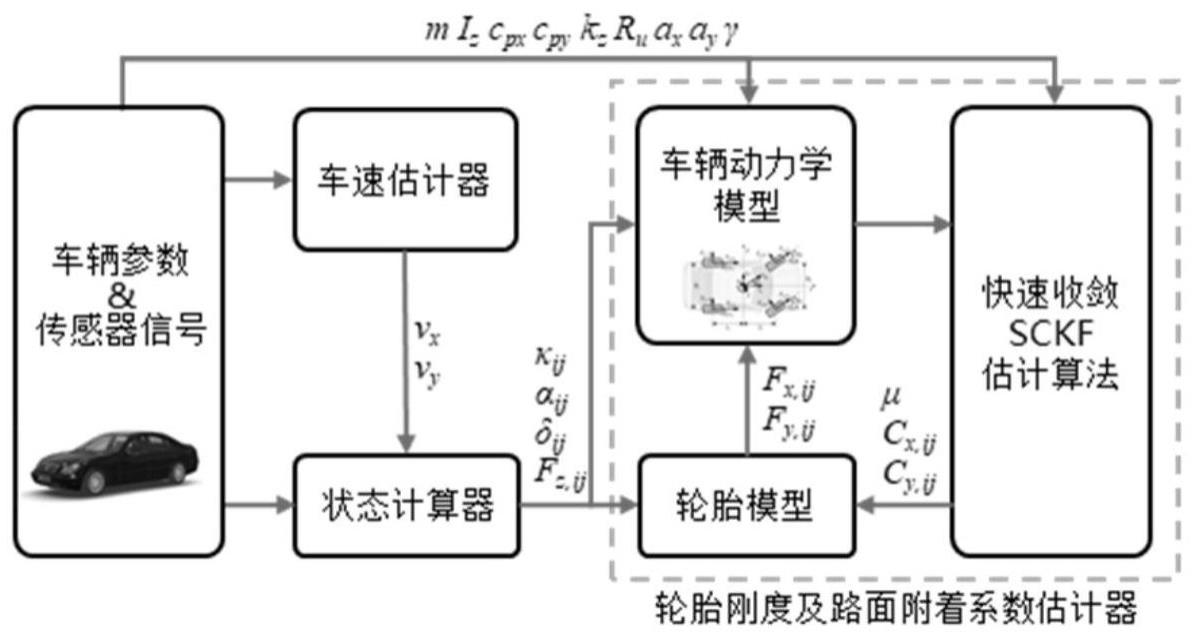
1、本发明的目的是提供基于快速收敛sckf和自适应轮胎刚度的路面附着系数估计方法,包括以下步骤:
2、1)获取汽车参数和实时传感器信号;
3、2)基于汽车参数和实时传感器信号,建立车辆动力学模型;
4、3)计算轮胎滑移率κij、轮胎侧偏角αij、轮胎转角δij、轮胎垂向力fz,ij,并建立组合刷子轮胎模型;
5、4)基于车辆动力学模型、组合刷子轮胎模型和快速收敛sckf估计算法,建立路面附着系数估计系统;
6、5)对路面附着系数估计系统进行解算,得到路面附着系数。
7、进一步,所述汽车参数包括汽车质量m、横摆转动惯量iz、车辆重心到前桥的距离lf和到后桥的距离lr、前轮距bf和后轮距br、前轮前束角和后轮前束角车辆质心高度hg、轮胎的纵向单位刚度cpx和侧向单位刚度cpy、轮胎垂向刚度kz、轮胎空载半径ru;
8、所述实时传感器信号通过车载传感器获得,包括汽车纵向加速度ax和侧向加速度ay、横摆角速度γ、车轮转速ωij、方向盘转角δsw。
9、进一步,所述车辆动力学模型如下所示:
10、
11、
12、
13、式中,vx和vy分别为纵向和侧向速度;γ为横摆角速度;ax和ay分别为纵向和侧向加速度;mz为横摆力矩;iz为车辆绕z轴的转动惯量。上标“.”表示导数;
14、其中,汽车的纵向加速度ax、侧向加速度ay和横摆力矩mz分别如下所示:
15、
16、
17、
18、式中,m为汽车总质量;lf和lr分别为车辆重心到前桥和后桥的距离;bf和br分别为前轮距和后轮距;fx,ij和fy,ij为轮胎纵向力和侧向力;δij为轮胎转角;下角标ij=fl,fr,rl,rr分别表示左前轮,右前轮,左后轮,右后轮。
19、进一步,轮胎滑移率κij、轮胎侧偏角αij、轮胎转角δij、轮胎垂向力fz,ij分别如下所示:
20、
21、
22、
23、
24、
25、式中,hg为车辆质心高度;δsw为方向盘转角;和分别为前轮和后轮前束角;iω为转向系统角传动比;ωij为车轮角速度;re为车轮的有效半径;vij为车轮中心在转向角方向上的速度。
26、进一步,所述组合刷子轮胎模型如下所示:
27、
28、
29、
30、
31、式中,cx和cy分别为轮胎纵向刚度和侧向刚度;κ为车轮滑移率;α为车轮侧偏角;μ为路面附着系数;fz为轮胎垂向载荷;f和f表示中间参量;fx、fy为轮胎纵向、侧向载荷;
32、其中,轮胎纵向刚度cx和侧向刚度cy的表达式分别如下所示:
33、
34、
35、式中,kz为轮胎的垂向弹性刚度;cpx和cpy分别为每单位长度的纵向和侧向胎面单元刚度;ru为轮胎空载半径。
36、进一步,所述路面附着系数估计系统的状态向量x、输入向量u和观测向量z分别如下所示:
37、
38、u=[fz,ij,αij,δij,κij]t (19)
39、
40、式中,μ为路面附着系数;cx,ij和cy,ij分别为每个轮胎的纵向和侧向刚度;
41、其中,横摆角加速度如下所示:
42、
43、式中,δt为估计器采样周期;k表示时刻。
44、进一步,路面附着系数估计系统的离散状态方程和测量方程分别如下所示:
45、xk=f(xk-1,uk-1)+wk-1 (22)
46、zk=h(xk,uk)+vk (23)
47、式中,和分别为在离散时刻k时的系统状态向量和观测向量;f()和h()分别为系统状态转移函数和观测函数;uk-1为系统输入向量;和分别为相互独立的过程噪声和测量噪声;
48、过程噪声和测量噪声满足下式:
49、
50、
51、式中,qk-1和rk分别为过程噪声wk-1和测量噪声vk的协方差矩阵;e表示数学期望;
52、其中,状态转移函数f()与观测函数h()分别如下所示:
53、
54、
55、式中,bf和br分别为前轮距和后轮距。
56、进一步,对路面附着系数估计系统进行解算的步骤包括:
57、5.1)根据容积规则构造2n个具有相同权值的容积点,得到:
58、
59、式中,sk-1为k-1时刻误差协方差pk-1的平方根因子;为k-1时刻系统状态向量的估计值;为容积点;
60、参量ξi如下所示:
61、
62、式中,in为n维单位矩阵;
63、5.2)计算传播容积点即:
64、
65、式中,uk-1为第k-1时刻的路面附着系数;
66、5.3)计算预测状态及其误差协方差矩阵的平方根因子即:
67、
68、
69、式中,tria()表示进行qr分解得到上三角矩阵的转置;为qk-1的平方根因子;矩阵
70、加权中心矩阵如下所示:
71、
72、5.4)建立增广回归模型,即:
73、
74、式中,zk为增广参量;
75、其中,向量λk如下所示:
76、
77、式中,为先验误差;
78、向量λk满足下式:
79、
80、式中,bk、和分别为误差协方差矩阵和测量协方差矩阵rk的cholesky分解;
81、5.5)在公式(34)两边同乘以得到归一化回归方程,即:
82、dk=w(xk,uk)+ek (37)
83、其中,向量dk、向量wk=w(xk,uk)、向量ek分别如下所示:
84、
85、
86、
87、式中,参数l=m+n;dl,k、wl,k、el,k分别表示向量dk、向量wk、向量ek中的元素;
88、5.6)建立基于最小误差熵准则的代价函数jmee(xk),即:
89、
90、式中,参数ei,k=di,k-wi,k,参数ej,k=dj,k-wj,k;gσ为高斯核函数;
91、5.7)求解代价函数jmee(xk)的最大值,得到状态向量的最优解;
92、求解时,令代价函数jmee(xk)关于xk的梯度为0,即:
93、
94、式中,σ2为方差;
95、其中,矩阵ψk、矩阵φk分别如下所示:
96、
97、
98、式中,参数φij,k=gσ(ei,k-ej,k);
99、5.8)定义矩阵ak如下:
100、
101、式中,元素元素元素元素元素
102、5.9)提取矩阵的对角线元素建立对角矩阵利用重新构建测量信息;
103、重建后的测量协方差矩阵如下所示:
104、
105、5.10)判断测量协方差矩阵是否为非正定矩阵;
106、若测量协方差矩阵为非正定矩阵,则执行标准sckf的步骤,包括步骤5.1)至步骤5.3),以及对路面附着系数估计系统进行修正的步骤;
107、若测量协方差矩阵为正定矩阵,则执行快速sckf的步骤,包括步骤5.1)至步骤5.9),以及对路面附着系数估计系统进行修正的步骤。
108、其中,对路面附着系数估计系统进行修正的步骤包括:
109、5.11)构造容积点即:
110、
111、式中,ξi为参量;
112、5.12)计算传播容积点即:
113、
114、5.13)计算预测观测及其新协方差矩阵的平方根因子:
115、
116、
117、式中,为rk的平方根因子,
118、新协方差矩阵的加权中心矩阵如下所示:
119、
120、5.14)计算系统互协方差矩阵即:
121、
122、其中,互协方差矩阵的加权中心矩阵如下所示:
123、
124、5.15)计算卡尔曼增益kk,即:
125、
126、5.16)计算更新状态及其误差协方差矩阵pk的平方根因子sk,得到:
127、
128、
129、5.17)以更新状态及其误差协方差矩阵pk的平方根因子sk作为k时刻状态向量的估计结果,并利用该结果进行k+1时刻的数据更新与校正。
130、一种计算机可读存储介质,其上存储有计算机程序;
131、当该计算机程序被调用时,执行上述方法的步骤。
132、本发明的技术效果是毋庸置疑的,本发明可以在各种工况下准确计算出路面附着系数,即使在轮胎出现一定程度的破损而导致垂向弹性刚度发生变化时,本方法也能够正确识别路面附着系数。
- 还没有人留言评论。精彩留言会获得点赞!