车辆速度规划方法、装置、电子设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种车辆速度规划方法、装置、电子设备及存储介质。
背景技术:
1、在自动驾驶领域,为了将复杂的规划问题进行降维和简化,目前普遍的做法是将横向规划和纵向规划问题进行解耦来分别单独进行求解。其中,纵向规划的方法主要分为三种,第一种是固定速度曲线构造的方式,常用的速度曲线有s型曲线、梯形曲线等。第二种是基于采样的方式,经典的有在状态空间采样的lattice(格密码)方法,以及控制空间采样的dwa(机器人规划)方法。第三种是基于数值优化的方法,通过对纵向问题进行建模,建立目标函数和约束条件,然后构造二次规划问题来求解最优的速度轨迹。
2、在传统纵向规划的三种方法中,固定速度曲线构造的方法虽然算法简单,计算量较小,但是该方法只能处理泊车等相对简单的行驶场景,无法处理复杂的交通场景。另外,基于采样的方法需要采样空间中的大量采样点,该方法最终达到的性能与采样点的密度有直接关系,即采样点的密度越大,产生最优轨迹的概率就越大,因此该方法的优势是可以清晰地建立选择轨迹的代价系统,并且能够稳定输出在当前代价系统下的最优轨迹。但是,该方法在大量采样的同时需要消耗大量的算力并且需要一定经验和大量的调试工作来构建轨迹的代价系统。基于数值优化的方法通常是构建目标为jerk(加速度变化率)最优的凸优化问题,该方法根据运动学边界约束求解最优的速度曲线,并在使用过程中往往结合搜算的方法一起使用,例如百度的apollo(携程框架部门研发的开源配置管理中心)的emplanner(em规划器)在纵向规划中会使用dp(决策)和qp(规划、优化曲线)结合的方式,搜索算法在该方法中主要用于提供决策信息。
3、传统的纵向规划方法在机器人领域和自动驾驶的乘用车领域均被广泛使用,通常被控对象的纵向延迟较低,纵向控制器能够较好的进行速度闭环和位置闭环,甚至可以做到加速度、速度以及位置的三重闭环。但是对于高延迟的纵向系统,比如卡车等具有高延迟属性的被控对象,如果从速度维度来进行规划,控制系统较难及时跟踪规划的速度和位移。另外,由于卡车本身存在不可控区域,导致自动驾驶过程中卡车纵向控制较不稳定,进而降低了纵向采样轨迹的合理性。
4、综上所述,传统的纵向规划方法在具有高延迟属性的被控对象中可控性较差。
技术实现思路
1、本发明提供一种车辆速度规划方法、装置、电子设备及存储介质,用以解决现有技术中纵向控制在具有高延迟属性的被控对象可控性较差的缺陷,实现对高延迟属性被控对象的稳定控制。
2、本发明提供一种车辆速度规划方法,所述方法包括:
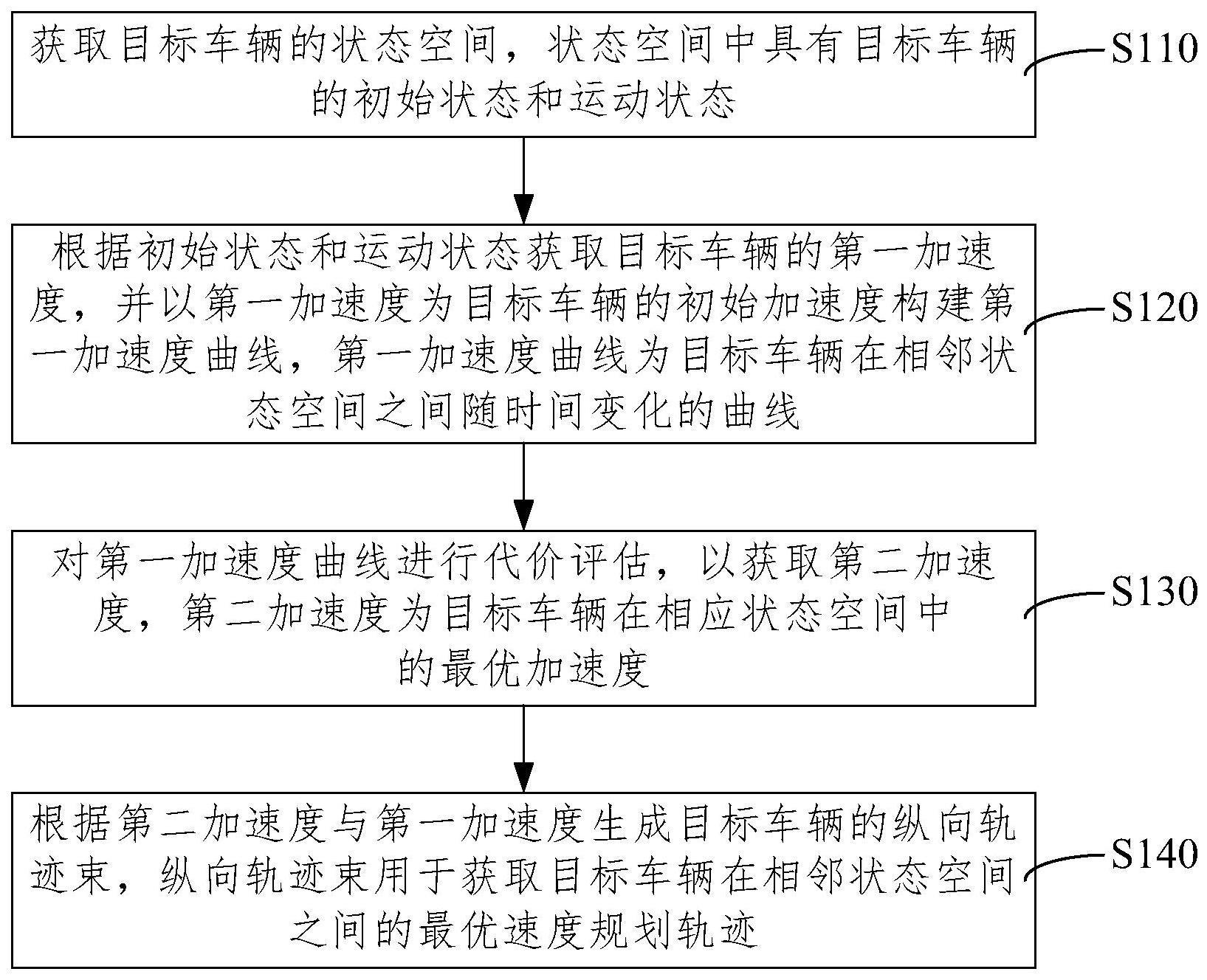
3、获取目标车辆的状态空间,所述状态空间中具有目标车辆的初始状态和运动状态;
4、根据所述初始状态和运动状态获取目标车辆的第一加速度,并以所述第一加速度为目标车辆的初始加速度构建第一加速度曲线,所述第一加速度曲线为目标车辆在相邻状态空间之间随时间变化的曲线;
5、对所述第一加速度曲线进行代价评估,以获取第二加速度,所述第二加速度为目标车辆在相应状态空间中的最优加速度;
6、根据所述第二加速度与第一加速度生成目标车辆的纵向轨迹束,所述纵向轨迹束用于获取目标车辆在相邻状态空间之间的最优速度规划轨迹。
7、根据本发明提供的一种车辆速度规划方法,所述获取目标车辆的状态空间,包括:
8、通过对所述目标车辆的当前状态进行辨识,获取目标车辆的轨迹路径和所述轨迹路径上的坡度信息;
9、根据所述轨迹路径和坡度信息获取目标车辆在总路程中不同时间的多个状态空间。
10、根据本发明提供的一种车辆速度规划方法,所述第一加速度包括目标车辆的滑行加速度和行驶加速度,所述根据所述初始状态和运动状态获取目标车辆的第一加速度,之后包括:
11、根据所述初始状态和运动状态获取目标车辆当前的滑行加速度和行驶加速度的边界值;
12、以所述行驶加速度和滑行加速度为目标车辆的初始加速度并根据所述行驶加速度和滑行加速度在状态空间中随时间的变化获取所述第一加速度曲线。
13、根据本发明提供的一种车辆速度规划方法,所述根据所述初始状态和运动状态获取目标车辆的第一加速度,包括:
14、根据所述目标车辆当前的行驶加速度上限边界值和滑行加速度获取目标车辆的加速度区间,所述加速度区间包括第一加速度范围和第二加速度范围;
15、根据所述第一加速度范围和第二加速度范围获取目标车辆的加速度集合;
16、通过三次曲线连接目标车辆的当前加速度和所述加速度集合中的加速度,得到所述第一加速度曲线;
17、其中,所述第一加速度范围为目标车辆的油门踏板对应的加速度范围,所述第二加速度范围为目标车辆的刹车踏板对应的加速度范围。
18、根据本发明提供的一种车辆速度规划方法,所述状态空间分为第一状态空间、第二状态空间和第三状态空间,所述第一状态空间、第二状态空间和第三状态空间位于同一规划周期,且所述第一状态空间和第二状态空间之间具有第一时间步长,所述第二状态空间与所述第三状态空间之间具有第二时间步长,所述规划周期中具有多个时间步长,所述对所述第一加速度曲线进行代价评估,以获取第二加速度,包括:
19、通过对所述状态空间进行栅格划分,获取目标车辆在同一时间处于所述第一状态空间的加速度,并对所述加速度对应的加速度曲线进行代价评估,以获取第二状态空间中的最优加速度;
20、通过将所述最优加速度作为目标车辆在所述第二时间步长起点的初始加速度,再次通过代价评估获取目标车辆在所述第三状态空间的最优加速度,以实现对目标车辆的状态剪枝。
21、根据本发明提供的一种车辆速度规划方法,所述根据所述第二加速度与所述第一加速度生成目标车辆的纵向轨迹束,包括:
22、获取目标车辆的第二加速度曲线,所述第二加速度曲线的起点为目标车辆在所述第一时间步长或第二时间步长起点处的最优加速度;
23、根据所述第一时间步长或第二时间步长对所述第二加速度曲线进行时间积分,以获取目标车辆的速度曲线和纵向位移曲线;
24、其中,所述第一时间步长的终点为所述第二时间步长的起点。
25、根据本发明提供的一种车辆速度规划方法,所述方法还包括:
26、当所述目标车辆具有不可控区域时,获取目标车辆的第三加速度,所述第三加速度为目标车辆在所述不可控区域边界的加速度;
27、获取第四加速度,所述第四加速度为目标车辆在所述不可控区域内的滑行加速度;
28、根据所述第三加速度和第四加速度生成所述目标车辆的在所述不可控区域的速度规划轨迹。
29、本发明还提供一种车辆速度规划装置,所述装置包括:
30、状态获取模块,用于获取目标车辆的状态空间,所述状态空间中具有目标车辆的初始状态和运动状态;
31、加速度采样模块,用于根据所述初始状态和运动状态获取目标车辆的第一加速度,并以所述第一加速度为目标车辆的初始加速度构建第一加速度曲线,所述第一加速度曲线为目标车辆在相邻状态空间之间随时间变化的曲线;
32、代价评估模块,用于对所述第一加速度曲线进行代价评估,以获取第二加速度,所述第二加速度为目标车辆在相应状态空间中的最优加速度;
33、轨迹生成模块,用于根据所述第二加速度与第一加速度生成目标车辆的纵向轨迹束,所述纵向轨迹束用于获取目标车辆在相邻状态空间之间的最优速度规划轨迹。
34、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的车辆速度规划方法。
35、本发明还提供一种计算机存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的车辆速度规划方法。
36、本发明提供的车辆速度规划方法、装置、电子设备及存储介质,通过获取目标车辆的初始状态和运动状态,并根据目标车辆的初始状态和运动状态获取目标车辆的初始加速度,进而基于目标车辆的初始加速度及其运动状态构建目标车辆在相邻状态空间之间的加速度曲线,并对构建的加速度曲线进行代价评估,得到相应的最优加速度。最后根据目标车辆的初始加速度和最优加速度生成相应的纵向轨迹束,并通过该纵向轨迹束获取目标车辆在相邻状态空间之间的最优速度规划轨迹。该方法通过对不同的状态空间的划分,结合目标车辆的运动特性,并通过相邻状态空间速度规划轨迹的拼接,生成较合理的速度规划轨迹,在一定程度上增加了纵向规划轨迹的灵活性,使得车辆速度规划轨迹更加丰富,增强了控制具有高延迟属性的被控对象的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!