自车行驶状态识别方法、装置、车辆及存储介质与流程
本发明涉及车辆行驶状态识别,尤其涉及一种自车行驶状态识别方法、装置、车辆及存储介质。
背景技术:
1、毫米波雷达传感器作为感知设备广泛应用于汽车辅助驾驶和自动驾驶领域,不仅能准确的识别障碍物,还能精确感知障碍物的距离,并能在此基础上再结合自车车速,感知目标的运动和静止属性。
2、不过雷达对于动态目标识别具有优势的前提是提前预知自车的行驶状态(前进,倒车,静止)。但是由于某些情况下自车空挡也可前后滑行,所以基于档位识别自车的行驶状态的方法不够准确。
技术实现思路
1、本发明实施例提供了一种自车行驶状态识别方法、装置、车辆及存储介质,以解决目前基于档位识别自车行驶状态不够准确的问题。
2、第一方面,本发明实施例提供了一种自车行驶状态识别方法,包括:
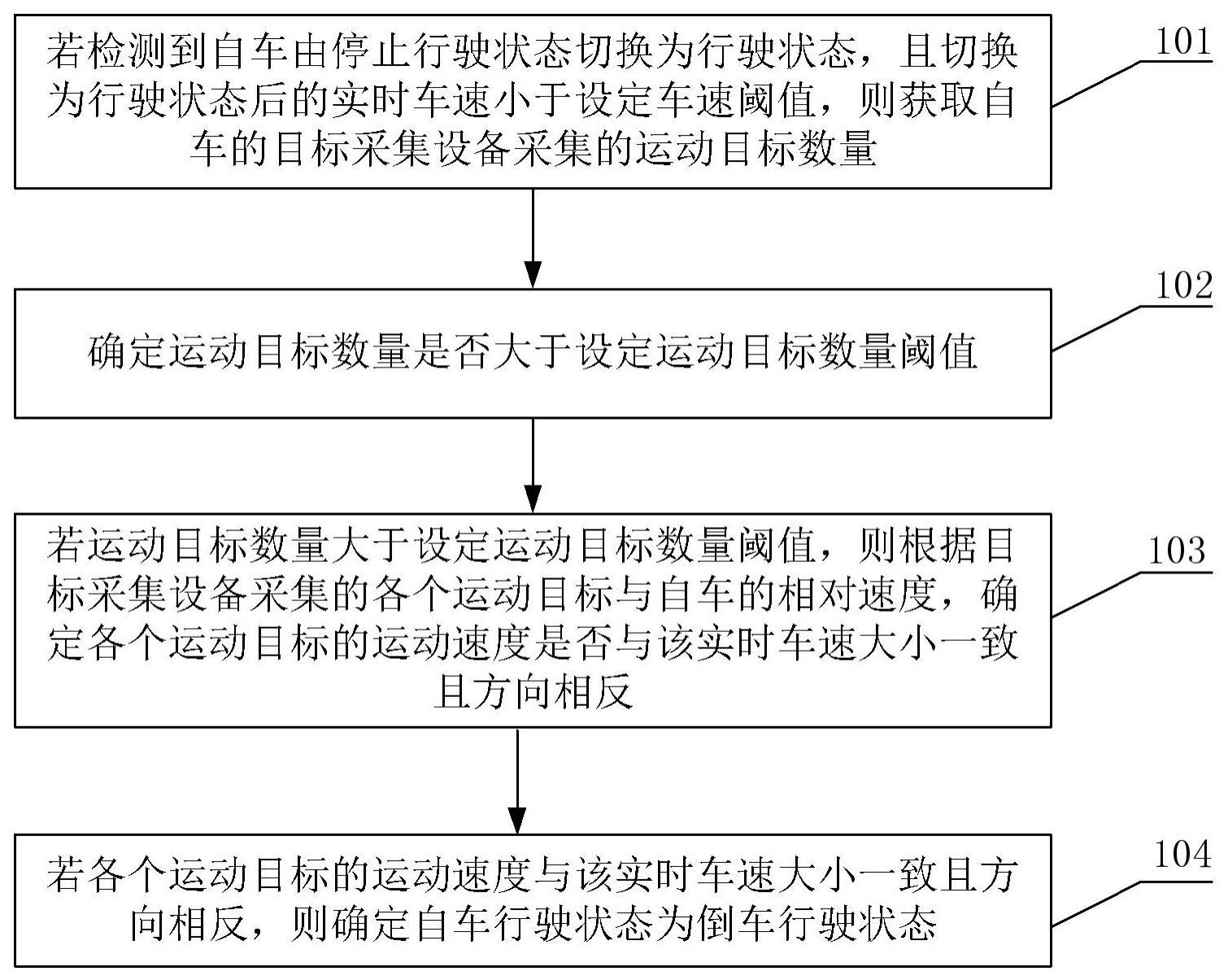
3、若检测到自车由停止行驶状态切换为行驶状态,且切换为行驶状态后的实时车速小于设定车速阈值,则获取自车的目标采集设备采集的运动目标数量;
4、确定所述运动目标数量是否大于设定运动目标数量阈值;
5、若所述运动目标数量大于所述设定运动目标数量阈值,则根据所述目标采集设备采集的各个运动目标与自车的相对速度,确定各个运动目标的相对速度是否与该实时车速大小一致且方向相反;
6、若各个运动目标的相对速度与该实时车速大小一致且方向相反,则确定自车行驶状态为倒车行驶状态。
7、在一种可能的实现方式中,在获取自车的目标采集设备采集的运动目标数量之前,还包括:
8、获取自车的目标采集设备采集的总目标数量,并确定所述总目标数量是否大于设定最小总目标数量;
9、所述获取自车的目标采集设备采集的运动目标数量,包括:
10、若所述总目标数量大于所述设定最小总目标数量,则获取自车的目标采集设备采集的运动目标数量。
11、在一种可能的实现方式中,所述设定运动目标数量阈值为所述总目标数量的1/2;
12、所述确定所述运动目标数量是否大于设定运动目标数量阈值,包括:
13、确定所述运动目标数量是否大于所述总目标数量的1/2。
14、在一种可能的实现方式中,所述根据所述目标采集设备采集的各个运动目标与自车的相对速度,确定各个运动目标的相对速度是否与该实时车速大小一致且方向相反,包括:
15、根据各个运动目标与自车的相对速度的符号,确定各个运动目标的相对速度是否与该实时车速的方向相反;
16、若各个运动目标的相对速度与该实时车速的方向相反,则根据各个运动目标的所述相对速度,确定各个运动目标的相对速度是否与该实时车速大小一致。
17、在一种可能的实现方式中,所述相对速度包括纵向相对速度和横向相对速度,所述实时车速包括纵向实时车速;
18、所述根据各个运动目标的所述相对速度,确定各个运动目标的相对速度是否与该实时车速大小一致,包括:
19、根据各个运动目标的所述相对速度中的纵向相对速度的绝对值,计算各个运动目标的纵向相对速度均值;
20、根据所述纵向相对速度均值,计算各个运动目标的纵向相对速度方差;
21、计算所述纵向相对速度均值与该实时车速中的纵向实时车速的绝对值的差值;
22、根据各个运动目标的所述相对速度中的横向相对速度的绝对值,计算各个运动目标的横向相对速度标准差;
23、确定所述纵向相对速度方差是否小于设定方差阈值,所述差值是否小于设定差值阈值,以及所述横向相对速度标准差是否小于设定标准差阈值;
24、若所述纵向相对速度方差小于设定方差阈值,所述差值小于设定差值阈值,且所述横向相对速度标准差小于设定标准差阈值,则确定各个运动目标的相对速度与该实时车速大小一致;
25、若所述纵向相对速度方差大于或等于设定方差阈值,或者所述差值大于或等于设定差值阈值,或者所述横向相对速度标准差大于或等于设定标准差阈值,则确定各个运动目标的相对速度与该实时车速大小不一致。
26、在一种可能的实现方式中,所述若各个运动目标的相对速度与该实时车速大小一致且方向相反,则确定自车行驶状态为倒车行驶状态,包括:
27、若各个运动目标的相对速度与该实时车速大小一致且方向相反,则令倒车信号的累计数量自增,并记为第一累计数量;
28、确定所述第一累计数量是否大于第二累计数量,以及所述第一累计数量是否大于设定累计数量阈值;所述第二累计数量为前进信号的累计数量;
29、若所述第一累计数量大于所述第二累计数量,且所述第一累计数量大于所述设定累计数量阈值,则确定自车行驶状态为倒车行驶状态。
30、在一种可能的实现方式中,所述自车行驶状态识别方法还包括:若所述运动目标数量小于或等于所述设定运动目标数量阈值,则令前进信号的累计数量自增,并记为所述第二累计数量;
31、或者,若所述总目标数量小于或等于所述设定最小总目标数量,则令前进信号的累计数量自增,并记为所述第二累计数量;
32、或者,若各个运动目标的相对速度与该实时车速大小不一致或方向相同,则令前进信号的累计数量自增,并记为所述第二累计数量;
33、在确定所述第一累计数量是否大于第二累计数量,以及所述第一累计数量是否大于设定累计数量阈值之后,还包括:
34、若所述第一累计数量小于或等于所述第二累计数量,或者所述第一累计数量小于或等于所述设定累计数量阈值,则确定自车行驶状态为前进行驶状态。
35、第二方面,本发明实施例提供了一种自车行驶状态识别装置,包括:
36、第一处理模块,用于若检测到自车由停止行驶状态切换为行驶状态,且切换为行驶状态后的实时车速小于设定车速阈值,则获取自车的目标采集设备采集的运动目标数量;
37、第二处理模块,用于确定所述运动目标数量是否大于设定运动目标数量阈值;
38、第三处理模块,用于若所述运动目标数量大于所述设定运动目标数量阈值,则根据所述目标采集设备采集的各个运动目标与自车的相对速度,确定各个运动目标的相对速度是否与该实时车速大小一致且方向相反;
39、识别模块,用于若各个运动目标的相对速度与该实时车速大小一致且方向相反,则确定自车行驶状态为倒车行驶状态。
40、第三方面,本发明实施例提供了一种车辆,包括控制器,所述控制器包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序,执行如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
41、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
42、本发明实施例提供一种自车行驶状态识别方法、装置、车辆及存储介质,通过在检测到自车由停止行驶状态切换为行驶状态,且切换为行驶状态后的实时车速小于设定车速阈值时,获取自车的目标采集设备采集的运动目标数量,先确定运动目标数量是否大于设定运动目标数量阈值;然后在运动目标数量大于设定运动目标数量阈值时,再根据目标采集设备采集的各个运动目标与自车的相对速度,确定各个运动目标的相对速度是否与该实时车速大小一致且方向相反;在各个运动目标的相对速度与该实时车速大小一致且方向相反时,确定自车行驶状态为倒车行驶状态。本发明实施例考虑车辆由停止行驶状态切换为行驶状态,且切换为行驶状态后的实时车速较小时,车辆行驶状态可能为前进行驶状态也可能为倒车行驶状态的情况,以及倒车过程中实际静止目标将被检测成运动目标,这些运动目标的数量较多且其速度与自车实时车速大小相同、方向相反的特性,进而在检测到自车由停止行驶状态切换为行驶状态,且切换为行驶状态后的实时车速小于设定车速阈值时,基于自车的目标采集设备采集的运动目标数量和各个运动目标与自车的相对速度确定自车行驶状态是否为倒车行驶状态,从而避免基于档位识别自车的行驶状态不够准确的问题,并有利于雷达进行后续的动态目标识别。
- 还没有人留言评论。精彩留言会获得点赞!