车辆的拖车方法、装置、车辆及存储介质与流程
本技术涉及车辆拖车,特别涉及一种车辆的拖车方法、装置、车辆及存储介质。
背景技术:
1、随着新能源车辆产业的快速发展,电动车辆已在市场上广泛应用,其中,在高速行车路段或者其他复杂场景行车路段,对于电动车辆的拖车控制还需进一步改善,以便于节约相关维修人员的拖车时间。
2、相关技术中,大多通过相关维修人员对车辆进行人工拖车,以对车辆进行维修或充电。
3、然而,通过人工拖车无法使车辆快速进入拖车状态,同时增加了拖车时间及操作步骤,提升了安全隐患,亟需解决。
技术实现思路
1、本技术提供一种车辆的拖车方法、装置、车辆及存储介质,以解决通过人工拖车无法使车辆快速进入拖车状态,导致拖车时间耗时长等问题。
2、本技术第一方面实施例提供一种车辆的拖车方法,包括以下步骤:
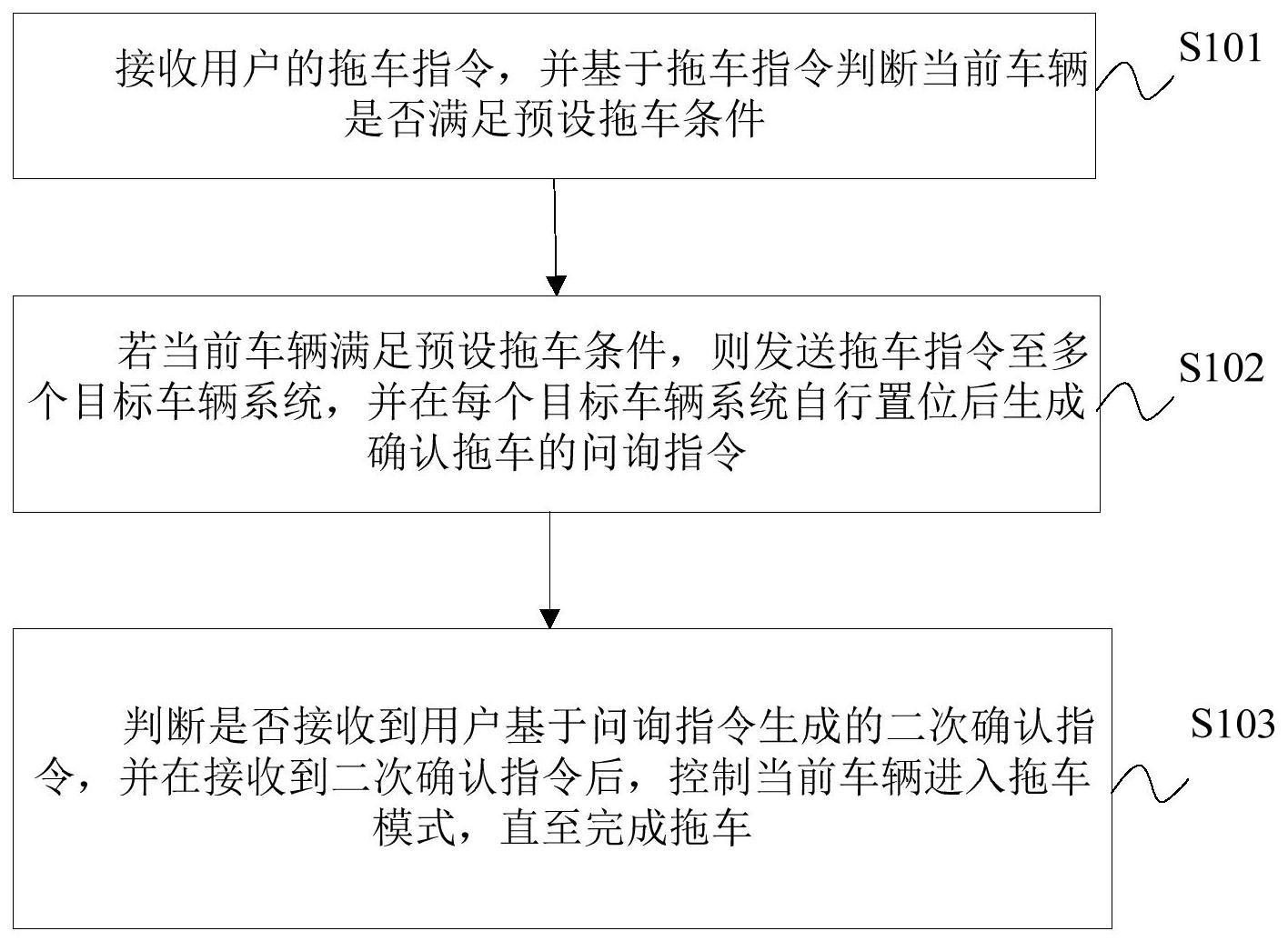
3、接收用户的拖车指令,并基于所述拖车指令判断当前车辆是否满足预设拖车条件;
4、若所述当前车辆满足所述预设拖车条件,则发送所述拖车指令至多个目标车辆系统,并在每个目标车辆系统自行置位后生成确认拖车的问询指令;以及
5、判断是否接收到所述用户基于所述问询指令生成的二次确认指令,并在接收到所述二次确认指令后,控制所述当前车辆进入拖车模式,直至完成拖车。
6、根据本技术的一个实施例,所述判断当前车辆是否满足预设拖车条件,包括:
7、判断所述当前车辆的行车状态、挡位位置以及快慢充枪的插入状态;
8、在所述当前车辆的行车状态处于静止状态且挡位位置处于p挡且快慢充枪处于未插入状态时,判定所述当前车辆满足所述预设拖车条件,否则,判定所述当前车辆不满足所述预设拖车条件。
9、根据本技术的一个实施例,所述多个目标车辆系统包括电控系统vcu(vehiclecontrol unit,整车控制单元)、epb(electrical park brake,电子驻车系统)和esc(electronic stability program,电子稳定系统),所述发送拖车模式指令至所述多个目标车辆系统,并在每个目标车辆系统自行置位后生成确认拖车的问询指令,包括:
10、分别发送所述拖车模式指令至所述vcu、所述epb和所述esc,并通过所述vcu、所述epb和所述esc执行各自对应的自行置位动作;
11、判断所述自行置位动作完是否成,并在所述自行置位动作完成后,在所述车辆的中控大屏生成确认拖车的问询指令;
12、其中,所述自行置位动作包括:将车辆挡位切换为n挡,同时通过所述vcu发送epb释放指令给所述epb,所述epb执行释放动作,并抑制avh(auto hold,自动驻车系统)自动驻车功能,且控制所述车辆的epb电子驻车夹紧功能禁用、手动切p挡功能禁用、熄火进p挡功能禁用。
13、根据本技术的一个实施例,所述拖车模式指令的发送方式包括语音控制方式和/或物理按键控制方式。
14、根据本技术的一个实施例,在基于所述拖车指令判断所述当前车辆是否满足所述预设拖车条件之后,还包括:
15、若所述当前车辆不满足所述预设拖车条件,则控制所述拖车模式的物理按键呈禁用状态,并生成不满足所述预设拖车条件的预警提醒。
16、根据本技术实施例的车辆的拖车方法,接收用户的拖车指令,并在当前车辆满足预设拖车条件时发送拖车指令至多个目标车辆系统,并在每个目标车辆系统自行置位后生成确认拖车的问询指令,判断是否接收到用户基于问询指令生成的二次确认指令,并在接收到二次确认指令后,控制当前车辆进入拖车模式,直至完成拖车。由此,解决了通过人工拖车无法使车辆快速进入拖车状态,导致拖车时间耗时长等问题,通过控制车辆多个系统自行置位,使车辆快速进入拖车模式,并且在拖车模式退出后可以快速恢复初始状态,从而节约了拖车时间,提升了用户的驾乘体验。
17、本技术第二方面实施例提供一种车辆的拖车装置,包括:
18、判断模块,用于接收用户的拖车指令,并基于所述拖车指令判断当前车辆是否满足预设拖车条件;
19、确认模块,用于若所述当前车辆满足所述预设拖车条件,则发送所述拖车指令至多个目标车辆系统,并在每个目标车辆系统自行置位后生成确认拖车的问询指令;以及
20、控制模块,用于判断是否接收到所述用户基于所述问询指令生成的二次确认指令,并在接收到所述二次确认指令后,控制所述当前车辆进入拖车模式,直至完成拖车。
21、根据本技术的一个实施例,所述判断模块,具体用于:
22、判断所述当前车辆的行车状态、挡位位置以及快慢充枪的插入状态;
23、在所述当前车辆的行车状态处于静止状态且挡位位置处于p挡且快慢充枪处于未插入状态时,判定所述当前车辆满足所述预设拖车条件,否则,判定所述当前车辆不满足所述预设拖车条件。
24、根据本技术的一个实施例,所述多个目标车辆系统包括vcu、epb和esc,所述确认模块,具体用于:
25、分别发送所述拖车模式指令至所述vcu、所述epb和所述esc,并通过所述vcu、所述epb和所述esc执行各自对应的自行置位动作;
26、判断所述自行置位动作完是否成,并在所述自行置位动作完成后,在所述车辆的中控大屏生成确认拖车的问询指令;
27、其中,所述自行置位动作包括:将车辆挡位切换为n挡,同时通过所述vcu发送epb释放指令给所述epb,所述epb执行释放动作,并抑制avh自动驻车功能,且控制所述车辆的epb电子驻车夹紧功能禁用、手动切p挡功能禁用、熄火进p挡功能禁用。
28、根据本技术的一个实施例,所述拖车模式指令的发送方式包括语音控制方式和/或物理按键控制方式。
29、根据本技术的一个实施例,在基于所述拖车指令判断所述当前车辆是否满足所述预设拖车条件之后,所述判断模块,还用于:
30、若所述当前车辆不满足所述预设拖车条件,则控制所述拖车模式的物理按键呈禁用状态,并生成不满足所述预设拖车条件的预警提醒。
31、根据本技术实施例的车辆的拖车装置,接收用户的拖车指令,并在当前车辆满足预设拖车条件时发送拖车指令至多个目标车辆系统,并在每个目标车辆系统自行置位后生成确认拖车的问询指令,判断是否接收到用户基于问询指令生成的二次确认指令,并在接收到二次确认指令后,控制当前车辆进入拖车模式,直至完成拖车。由此,解决了通过人工拖车无法使车辆快速进入拖车状态,导致拖车时间耗时长等问题,通过控制车辆多个系统自行置位,使车辆快速进入拖车模式,并且在拖车模式退出后可以快速恢复初始状态,从而节约了拖车时间,提升了用户的驾乘体验。
32、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆的拖车方法。
33、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆的拖车方法。
34、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!