长编组胶轮车自导向、轨迹跟随、电气集中+域+云控制方法与流程
本发明属于交通领域,利用大数据、车地互联和精准地图技术,同时采用ai技术(如计算机识别、机器学习及专家系统技术等)虚拟出连续轨道,通过精准定位技术和ai技术实现车辆实时跟随虚拟轨道自导向和循迹运行,采用多轴或全轮主动转向技术实现后轮循迹,降低转弯半径,避免车辆甩尾和偏离车道,同时采用集中+域控制的电气架构以及云端技术方便实现车辆灵活编组、功能扩展及运行控制,易于根据现场条件配置两端或单端驾驶,降低长编组车辆包括胶轮列车操控及掉头难度,适用于城市brt巴士、机场摆渡车、胶轮列车、汽车列车,提高运量,缓解交通压力,适用于独立路权、半独立路权或混合路权的道路,相对于轨道交通系统存在建设和运营成本低
背景技术:
1、随着城市化发展,城市交通压力越来越大,地铁及轻轨运力大但建设成本运营成本高,而大运量的巴士、公交车和胶轮列车可提高运力,缓解城市交通压力由很大帮助。
2、目前国外已有多节通过铰链连接的超长巴士/公交车在运行,如世界上最长的公交巴士长达31米的车身,运输能力达到了256人,该车装备了4个转向轴与大量雷达传感器,它尾部的两个车厢会主动追随车头的转向轨迹进行主动转向,但没有实现虚拟轨道运行,需要承受长车身带来的转向半径过大的问题,不能很好应对城市内部复杂、拥堵的交通环境。
3、国内开行的智轨、数轨通过在地面刷引导线或安装磁钉用以循迹运行,影响美观,增加道路标识、线路的复杂性,增加了建设以及维护成本,降低城市运行的灵活性,同时部分路段需要与道路车辆共用车道,若与城市道路车辆的自动驾驶发展路线不一致,自动驾驶潜力有限。
4、目前国内对公交车的长度限制于18米以内,当时可能考虑到车身长导致转向半径大等带来的安全以及道路空间问题,但随着技术的进步可通过成熟可靠技术解决超长巴士在道路运行中产生的问题,如brt线路开通超长编组巴士,智轨和数轨将没有优势。
5、现有的交通系统存在下述问题:
6、地铁及轻轨虽然运力大,但建设和运营成本高,只适合大城市;
7、有轨电车等中小运量轨道交通系统,需要专有路权,同时建设和运营成本高,优势不明显,劣势显著;
8、智轨和数轨列车循迹需要额外增加地面设施和设备,增加道路标识复杂度;
9、国内开通的长编组巴士/公共交通均是单端驾驶,采用分布式网络控制不易于灵活编组及双端驾驶。
10、经专利检索,与本发明有一定关系的专利主要有以下专利:
11、申请号为“cn202110803657.1”、申请日为“2021.07.15”、公开号为“cn113415266a”、公开日为“2021.09.21”、名称为“一种车辆磁钉循迹运行的轨迹偏离防护方法”、申请人为“上海电气集团智能交通科技有限公司”的中国发明专利, 本发明公开了一种车辆磁钉循迹运行的轨迹偏离防护方法,构建磁钉为主、融合导航的车辆自动驾驶系统:所述车辆自动驾驶系统包括车辆、磁钉轨道和沿磁钉轨道设置的车道线,所述车辆上装载有控制器以及与其相连的车载传感器和执行机构;所述车载传感器包括车速传感器、惯性导航模块、前磁传感器和后磁传感器,所述执行机构包括动力系统、制动系统和转向系统;基于磁钉导航的车辆自动驾驶系统,通过实时监控车辆运行轨迹和姿态,实现对车辆运行轨迹的约束。本发明的车辆磁钉循迹运行的轨迹偏离防护方法,实时监视车辆在轨姿态,在有偏离轨道风险的情况下,通过告警、降速等方式有效保证车辆的安全运行,可以降低车辆沿磁钉循迹发生脱轨的危害性。
12、申请号为“cn202010789316.9”、申请日为“2020.08.07”、公开号为“cn114056372a”、公开日为“2022.02.18”、名称为“一种胶轮列车的转向系统及其控制方法”、申请人为“中车株洲电力机车研究所有限公司”的中国发明专利,本发明涉及一种胶轮列车的转向系统及其控制方法、一种胶轮列车,以及一种计算机可读存储介质。该转向系统包括:主动导向模块,适于向列车提供主动转向力以控制列车转向;导向轮,适于接触机械导向路段的地面导向结构,将地面导向结构提供的作用力传递到列车以实现列车的转向;以及处理器,配置为:根据地面的虚拟轨道控制主动导向模块向列车提供主动转向力,以控制列车沿虚拟轨道主动转向;响应于列车进入第一过渡段,逐步减小主动转向力以控制主动导向模块逐步退出工作;以及响应于列车进入第二过渡段,逐步增大主动转向力以控制主动导向模块逐步介入工作。
13、申请号为“201510803956.x”、申请日为“2015.11.20”、公开号为“cn105235758a”、公开日为“2016.01.13”、名称为“一种动力分散型轨迹跟随的胶轮低地板智能轨道列车”、申请人为“南车株洲电力机车研究所有限公司”的中国发明专利,本发明本发明公开了一种动力分散型轨迹跟随的胶轮低地板智能轨道列车,其包括:标准车头,包括为一具有两轴支撑的车辆结构,其中标准车头的第一轴具备线控转向功能,第二轴为线控转向机构;所述标准车头在后部预留有与铰接机构连接的标准接口;铰接机构,为一具有上下方向旋转和左右方向旋转二自由度的链接机构;所述铰接机构的两端均有标准接口,用于与标准车头、标准动力车厢、标准拖车车厢之间的连接;标准动力车厢,为具有一轴支撑的车辆结构;标准拖车车厢,包括为一具有两轴支撑的车辆结构;所述标准拖车车厢的拖车第一轴和拖车第二轴均具备线控转向功能。本发明具有多轴转向、动力分散、模块化设计等优点。
14、上述专利没有低成本实现长编组巴士或虚拟轨道列车的运行,以及循迹的可靠性。
技术实现思路
1、本发明要解决的技术问题是针对现有技术中存在的缺陷,采用ai技术、大数据、通信网联、精准地图技术来识别和规划行进轨迹,可拟合出虚拟轨道,车载设备根据车辆精准定位、姿态识别和ai技术实时跟随虚拟轨迹运行,通过采用多轴主动转向技术实现后部车辆车轴循迹虚拟轨道或导向轮,降低转弯半径和车辆甩尾,同时采用集中电气架构和云端技术实现车辆灵活编组和功能扩展,支持可根据现场条件配置两端或单端驾驶,降低长编组车辆包括胶轮列车操控及掉头难度,提高运量且缓解交通压力,适用于独立路权、半独立路权和混合路权的道路车辆,如城市brt巴士、机场摆渡车、胶轮列车等。
2、车载环境感知和计算机识别技术通过识别车道、交通灯和道路标识标线、道路沿线设施、建筑物等关键静态属性,车载控制设备在弯道、路口及有遮挡的情况可通过道路沿线布置的感知单元经车地通信获取感知数据与车载感知数据匹配及拟合从而连续识别道路沿线关键静态属性,结合车辆预期运行线路,可在有车道线的道路识别特定运行车道,可在没有车道线的道路智能拟合出运行车道,在路口可拟合出合适的车道通行,从而产生车辆所需的运行的连续轨迹,等效出虚拟轨道,虚拟轨道至少包含车辆前方一定距离、同时可包含贯穿车身的虚拟轨道。
3、对于运行路线固定如公共交通brt或虚拟轨道列车,可预先生成并实时更新道路沿线的精准地图(如2d/3d地形地貌地图、点云图等),通过车辆计划线路及结合高精地图生成用于车辆运行连续虚拟轨迹,进而等效出虚拟轨道,车辆可预存虚拟轨道或通过车地通信获取虚拟轨道信息。
4、或可通过上述虚拟轨迹生成的方法组合冗余或相互验证,实现可靠车辆运行的连续虚拟轨迹生成,即虚拟轨道。
5、虚拟轨道可通过车载显示器的导航中显示,可通过抬头显示功能投影到前挡风玻璃上同时可显示车道等道路信息、限速实速等车辆信息,或直接投影到地面方式。
6、不需要在道路沿线专门设置用于虚拟轨道的设备设施,如光学引导线、磁钉等,降低建设和运营成本,降低城市道路标识标线复杂性。
7、虚拟轨道可实时根据道路运行情况进行优化和调整,如突发事件需要变道和绕道。
8、虚拟轨迹可离散化处理,通过位置坐标保存,车载设备在调用时可拟合为连续坐标用于导向和循迹。
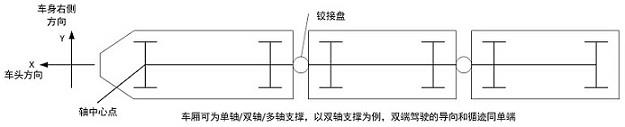
9、虚拟轨道作为车辆各车轴中心点的循迹参照,等效为中间导轨的无轨电车运行,或参考点为车辆其它部位方便用于循迹和导向。
10、环境感知单元可为多源融合,包括多目摄像头、激光雷达、毫米波雷达(可为4d毫米波雷达、uwb)等,可形成精准的平面/立体的图像/点阵图,通过增加位置坐标(尤其是道路沿线既有的关键静态属性)形成精准地图,首节车、中间车辆、尾部车辆均可安装环境感知设备用于各自车厢的定位、姿态确认、横向角度确认。
11、车辆运行方向前轴或导向轴采用线控转向根据虚拟轨道自动导向,后轮根据虚拟轨道进行闭环调节的循迹控制,参考点为各轴的中心点或转向架轮对的中心点需沿虚拟轨道运行即根据各轴中心点与虚拟轨道间位置偏差和夹角从而控制各轴的转向角度。
12、车辆安装轴速度传感器和相对车辆前进方向横向角度传感器(可通过惯性导航系统测量)实时测量车辆的速度、车身相对虚拟轨道姿态、运行方向等,同时可融合低轨道卫星增强定位和差分定位功能进行定位和测速(参照专利cn 202210234972.1),可融合环境感知并与高精度地形地貌地图或点云图匹配进行精准定位或定位校准和车身姿态确定等,可辅以电磁感应如磁钉定位进行初始定位和关键地段如路口处定位等,从而获取可靠的车辆各车厢速度、姿态、位置和运行方向,从而实时换算出各轴的中心点位置坐标和运动状态;各轴中心点位置和运动状态根据环境感知设备融合计算出,后轴中心点也可根据车身固定尺寸、车厢夹角以及已经确定的轴位置和运动状态计算出。
13、车辆各转向轴安装转向角度传感器,各车厢铰接处安装铰接设备的角度传感器,可冗余配置,提高转向轴的转向角度测量和车厢间铰接设备角度的可靠性。
14、车载控制设备通过虚拟轨道与前轴中心点的位置偏差和角度差、车辆速度实时计算出导向轮转向角度,通过控制导向轮转向角及采集的导向轮转向角进行实时闭环调节控制,即实现自动导向功能;车载控制设备可通过运行方向首节车辆后轴中心点与对应位置的虚拟轨道位置差及角度差,可结合导向轴转向角度、车辆速度和本轴转向角度实时进行轨迹跟随和调整转向角度;车载控制设备通过后车车辆的轴中心点与对应位置的虚拟轨道位置差及角度差,可结合本车厢与前一节车厢铰接夹角、车辆速度和本轴转向角度实时进行轨迹跟随和调整转向角度。
15、当全轮采用轮毂电机/轮边电机驱动时,运行方向导向轴采用线控转向,后轮可通过轮毂电机/轮边电机实现驱动运行、电制动、主动转向;当不采用轮毂电机/轮边电机驱动时,运行方向导向轴采用线控转向,后轮通过控制转向机动作使得转向拉杆移动从而实现后轮的主动转向;当全轮采用轮毂电机/轮边电机驱动时,可将通过控制转向机构动作使得横向拉杆移动从而实现主动转向作为冗余后备。
16、每个转向轴可独立规划虚拟轨迹,正常行驶时尽量保持各后轮虚拟轨迹与导向轮虚拟轨迹重合,在突发情况可如变道过程中,每个转向轴设定的虚拟轨迹可不重合。
17、车辆后轮可根据车辆速度和导向轮的转向角度识别变道或转弯掉头,或可通过车载控制器识别出车辆的动作如变道、转弯掉头等动作,或可通过预先规划好的运行轨迹获取车辆的动作,后轮可根据车辆速度、车辆动作执行不同的转向控制逻辑,当车辆面临转弯或变道时,后轮可根据需要调整与导向轮同向或反向转向,降低转弯半径和甩尾,后轮运行轨迹与前轮运行轨迹不重合。
18、虚拟股道车辆的运行路线为固定路线,当出现突发情况可变道运行,为提高车辆行驶稳定和乘坐舒适,可采用后轮可根据需要调整与导向轮同向转向,车辆的每个转向轴可独立制定虚拟轨迹并跟随运行,提高车辆运行稳定和舒适性。
19、在车辆停靠站台时,通过环境感知单元和精准数字地图匹配定位技术可实现站内停车过程的虚拟轨迹生成,等效出虚拟轨道,但常规循迹较难实现车辆紧靠站台停车,可通过各车轴独立拟合虚拟轨迹,同时后轮可同导向轮转向,可实现车辆紧靠站台精准停车和发车,方便乘客上下行。
20、虚拟轨道的生成较为灵活,很好适用于突发改线运行,不同车辆的虚拟轨道可分时重合,实现公交运行线路灵活规划;通过公共交通车辆信息的共享,车辆可实现灵活编组运行和解编运行,提高运输效率。
21、设置虚拟轨道跟随的偏差范围,车载控制设备实时通过车辆的位置、姿态、车速及转向角度可识别出车辆超出循迹界限、及识别类似脱轨的危险报警提示、降速调整、及其他相应处理。
22、通过ai技术不断自学习、大数据及丰富场景的训练完善虚拟轨迹生成、车辆自动导向以及车辆循迹运行算法。
23、长编组车辆各车厢采用铰接方式连接,当线路不具备掉头场地时可采用双端驾驶配置,当线路具备掉头场地时可采用单端驾驶模式降低成本。
24、车载环境感知单元和ai技术目前可用于行人动物、汽车的限界入侵识别,用于障碍物识别,作出预警和警示,可与现有汽车的自动驾驶发展路线一致,升级空间巨大,随着v2x技术、环境感知单元、ai技术的进一步完善推动自动驾驶落地,可实现车辆在混合车道的自动驾驶,可实现全程自动驾驶。
25、当手动驾驶时,车内显示屏和抬头显示的导航系统可指示出虚拟轨道用于导向;后轮可根据虚拟轨道进行循迹,或可根据导向轮的运行轨迹、导向轮转向角度、速度、车厢夹角等进行循迹运行。
26、车辆采用电驱动方式推进,可采用集中动力或分布式动力,电机可采用轮边电机或轮毂电机,通过电机的正转和反转实现双端行驶以及电制动;车辆采用线控转向和线控制动技术,当采用两端驾驶时需两端各配置线控转向设备和两套制动控制设备;可虚拟双端驾驶模式,一端具备完整的驾驶舱,另一端通过将车内外视频数据传送到驾驶端,驾驶端可控制运行前轴线控转向等驾驶动作实现后端开车,可参照中国专利cn 202210188186.2。
27、车辆网络拓扑及控制可参考列车通信网络tcn,车辆各车厢间采用冗余总线、或环网等冗余方式交互数据,各界车厢配置网关,车辆编组可通过车辆初运行实现、或通过配置固化到设备中实现(车辆编组修改需要改动配置),车辆可采用集中+域电气架构以及云端处理+实时车地通信(参照中国发明专利cn202211297476.7),可支持车辆灵活编组和两端驾驶。
28、司机室设置驱采单元,实现操控和车辆端分离,易于实现车辆双端驾驶,并同时支持自动驾驶。
29、对于单端驾驶的车辆,中央处理单元放置于头车;对于两端驾驶的车辆,中央处理单元可放置于其中一辆头车,或放置两端车互为冗余,只有激活端操控单元有效。
30、本发明的有益效果为:本发明属于交通领域,利用大数据、车地互联和精准地图技术,同时采用ai技术(如计算机识别、机器学习及专家系统技术等)虚拟出连续轨道,通过精准定位技术和ai技术实现车辆实时跟随虚拟轨道自导向和循迹运行,采用多轴或全轮主动转向技术实现后轮循迹,降低转弯半径,避免车辆甩尾和偏离车道,同时采用集中+域控制的电气架构以及云端技术方便实现车辆灵活编组、功能扩展及运行控制,易于根据现场条件配置两端或单端驾驶,降低长编组车辆包括胶轮列车操控及掉头难度,适用于城市brt巴士、机场摆渡车、胶轮列车、汽车列车,提高运量,缓解交通压力,适用于独立路权、半独立路权或混合路权的道路,相对于轨道交通系统存在建设和运营成本低。
- 还没有人留言评论。精彩留言会获得点赞!