一种方向盘自适应调节方法、装置、设备及可读存储介质与流程
本技术涉及车辆控制,特别涉及一种方向盘自适应调节方法、装置、设备及可读存储介质。
背景技术:
1、随着经济的快速发展和人们生活水平的不断提升,汽车已然成为人们生活中必不可少的出行工具。其中,驾驶员在进入车辆后,往往会对驾驶姿势(主要包括座椅和方向盘)进行调节,一般的调节顺序为:根据踏板位置确定座椅的前后位置,根据前方视野和个人喜好确定座椅的高低位置,最后根据仪表可视、手臂可及的需求来分别确定方向盘的上下、前后位置。
2、车辆方向盘一般具备前后、上下调节功能,以便于不同身材驾驶员的驾驶和调节需求。相关技术中,在进行方向盘调节时,用户往往根据自身需求手动调节方向盘位置,其具体的操作形式为:用户解锁方向盘锁止手柄,手动对方向盘进行轴向伸缩和轴向旋转操作,存在繁琐且费力的问题;或者,用户根据自身需求并通过电动调节方向盘的上下和前后位置,其具体的操作形式为:用户操作四向调节按钮,并通过四向调节按钮的操作使电机驱动方向盘的轴向伸缩和轴向旋转操作,虽然省力,但不够智能化。
3、由此可见,无论是手动调节还是电动调节,均为用户主动调节,而非根据用户需求自适应和个性化调节,其不符合未来智能化汽车的发展趋势。
技术实现思路
1、本技术提供一种方向盘自适应调节方法、装置、设备及可读存储介质,以解决相关技术中无法自适应实现方向盘调节的问题。
2、第一方面,提供了一种方向盘自适应调节方法,包括以下步骤:
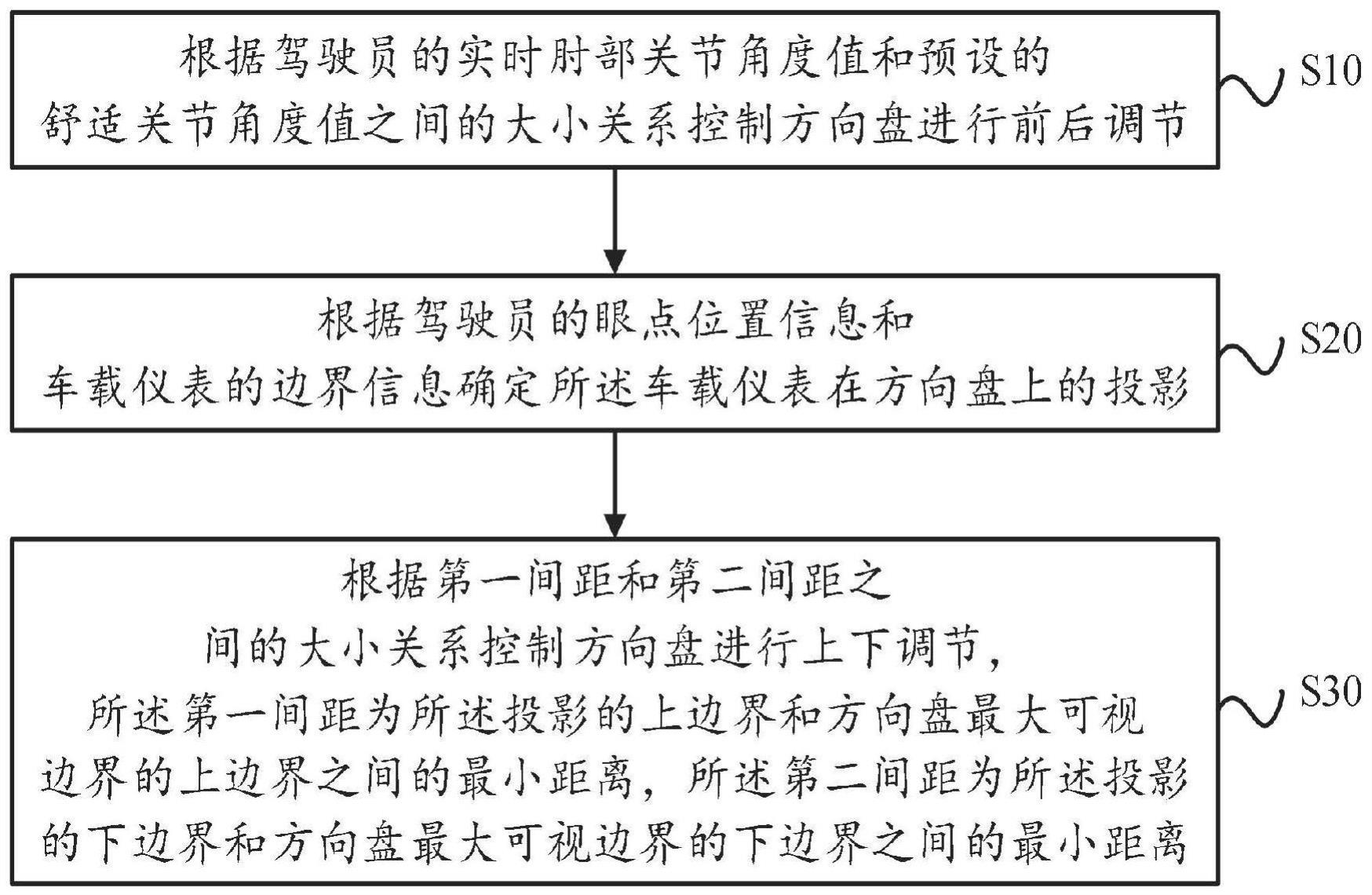
3、根据驾驶员的实时肘部关节角度值和预设的舒适关节角度值之间的大小关系控制方向盘进行前后调节;
4、根据驾驶员的眼点位置信息和车载仪表的边界信息确定所述车载仪表在方向盘上的投影;
5、根据第一间距和第二间距之间的大小关系控制方向盘进行上下调节,所述第一间距为所述投影的上边界和方向盘最大可视边界的上边界之间的最小距离,所述第二间距为所述投影的下边界和方向盘最大可视边界的下边界之间的最小距离。
6、一些实施例中,在所述根据驾驶员的实时肘部关节角度值和预设的舒适关节角度值之间的大小关系控制方向盘进行前后调节的步骤之前,还包括:
7、通过固设于驾驶员上方的第一摄像模块获取驾驶员坐姿的俯视图;
8、通过固设于驾驶员侧方的第二摄像模块获取驾驶员坐姿的侧视图;
9、基于驾驶员坐姿的俯视图和侧视图计算出实时肘部关节角度值;
10、其中,所述俯视图和所述侧视图均包含驾驶员的上肢位置信息和驾驶员的眼点位置信息。
11、一些实施例中,所述基于驾驶员坐姿的俯视图和侧视图计算出实时肘部关节角度值,包括:
12、根据所述俯视图中驾驶员的肩关节点坐标、肘关节点坐标以及手抓握点坐标计算得到俯视图下驾驶员的肘部关节角度值;
13、根据所述侧视图中驾驶员的肩关节点坐标、肘关节点坐标以及手抓握点坐标计算得到侧视图下驾驶员的肘部关节角度值;
14、根据俯视图下驾驶员的肘部关节角度值和侧视图下驾驶员的肘部关节角度值计算出三维人体下驾驶员的实时肘部关节角度值。
15、一些实施例中,在所述根据驾驶员的实时肘部关节角度值和预设的舒适关节角度值之间的大小关系控制方向盘进行前后调节的步骤之前,还包括:
16、通过固设于驾驶员上肢位置的角度传感模块计算得到驾驶员的实时肘部关节角度值。
17、一些实施例中,在所述根据驾驶员的实时肘部关节角度值和预设的舒适关节角度值之间的大小关系控制方向盘进行前后调节的步骤之后,还包括:
18、在预设时间后重新计算驾驶员新的肘部关节角度值;
19、若所述新的肘部关节角度值不等于所述舒适关节角度值,则不对方向盘的前后位置进行调节。
20、一些实施例中,所述根据驾驶员的实时肘部关节角度值和预设的舒适关节角度值之间的大小关系控制方向盘进行前后调节,包括:
21、若所述实时肘部关节角度值大于所述舒适关节角度值,则控制所述方向盘向靠近驾驶员的方向调节;
22、若所述实时肘部关节角度值等于所述舒适关节角度值,则不控制所述方向盘前后调节;
23、若所述实时肘部关节角度值小于所述舒适关节角度值,则控制所述方向盘向远离驾驶员的方向调节。
24、一些实施例中,所述根据驾驶员的眼点位置信息和车载仪表的边界信息确定所述车载仪表在方向盘上的投影,包括:
25、根据驾驶员的眼点位置信息和车载仪表的边界信息生成所述车载仪表的可视包络边界;
26、将所述可视包络边界与方向盘平面相交所形成的区域作为所述车载仪表在方向盘上的投影。
27、一些实施例中,所述根据第一间距和第二间距之间的大小关系控制方向盘进行上下调节,包括:
28、当所述第一间距小于所述第二间距,则控制所述方向盘向上调节;
29、当所述第一间距等于所述第二间距,则不控制所述方向盘上下调节;
30、当所述第一间距大于所述第二间距,则控制所述方向盘向下调节。
31、一些实施例中,所述控制所述方向盘向上调节,包括:
32、根据所述第一间距和所述第二间距计算得到向上调节距离;
33、根据所述向上调节距离和方向盘的旋转半径计算得到方向盘旋转轴的旋转角度;
34、基于所述旋转角度控制方向盘旋转轴的旋转,以使得所述方向盘向上调节的距离为所述向上调节距离。
35、一些实施例中,所述控制所述方向盘向下调节,包括:
36、根据所述第一间距和所述第二间距计算得到向下调节距离;
37、根据所述向下调节距离和方向盘的旋转半径计算得到方向盘旋转轴的旋转角度;
38、基于所述旋转角度控制方向盘旋转轴的旋转,以使得所述方向盘向下调节的距离为所述向下调节距离。
39、一些实施例中,所述旋转角度与所述第一间距、所述第二间距之间的关系为:
40、|h1-h2|/2=2*r*sin(a/2)
41、式中,h1表示第一间距,h2表示第二间距,r表示方向盘的旋转半径,a表示旋转角度。
42、一些实施例中,在所述根据第一间距和第二间距之间的大小关系控制方向盘进行上下调节的步骤之后,还包括:
43、在预设时间后重新获取新的第一间距和新的第二间距;
44、若所述新的第一间距不等于所述新的第二间距,则不对方向盘的上下位置进行调节。
45、第二方面,提供了一种方向盘自适应调节装置,包括:分析模块和调节模块;
46、所述调节模块用于根据驾驶员的实时肘部关节角度值和预设的舒适关节角度值之间的大小关系控制方向盘进行前后调节;
47、所述分析模块用于根据驾驶员的眼点位置信息和车载仪表的边界信息确定所述车载仪表在方向盘上的投影;
48、所述调节模块还用于根据第一间距和第二间距之间的大小关系控制方向盘进行上下调节,所述第一间距为所述投影的上边界和方向盘最大可视边界的上边界之间的最小距离,所述第二间距为所述投影的下边界和方向盘最大可视边界的下边界之间的最小距离。
49、第三方面,提供了一种方向盘自适应调节设备,包括:存储器和处理器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行,以实现前述的方向盘自适应调节方法。
50、第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被处理器执行时,以实现前述的方向盘自适应调节方法。
51、本技术提供了一种方向盘自适应调节方法、装置、设备及可读存储介质,包括根据驾驶员的实时肘部关节角度值和预设的舒适关节角度值之间的大小关系控制方向盘进行前后调节;根据驾驶员的眼点位置信息和车载仪表的边界信息确定所述车载仪表在方向盘上的投影;根据第一间距和第二间距之间的大小关系控制方向盘进行上下调节,所述第一间距为所述投影的上边界和方向盘最大可视边界的上边界之间的最小距离,所述第二间距为所述投影的下边界和方向盘最大可视边界的下边界之间的最小距离。通过本技术,可根据驾驶员的肘部关节角度值和舒适关节角度值自适应调整方向盘的前后位置,同时,可根据驾驶员的眼点位置信息、车载仪表的边界信息以及方向盘最大可视边界自适应调整方向盘的上下位置,进而实现方向盘的自适应个性化调节。
- 还没有人留言评论。精彩留言会获得点赞!